Der SAW-Roboter kriecht, krabbelt und schwimmt mit nur einem Motor
 Wenn Sie Bewegung benötigen, kann das Gerät auf Räder und Schienen zurückgreifen, gehen oder in die exotische Ebene des Krabbelns und Schwimmens gehen. Es gibt viele Möglichkeiten, den Roboter in Bewegung zu setzen. Manchmal scheint es sogar so, als könne nichts Neues erfunden werden. Dies ist jedoch weit davon entfernt. In einem kürzlich veröffentlichten Artikel beschreibt David Zarruk von der Ben-Gurion-Universität des Negev einen wellenförmigen Wurmroboter, der von nur einem Aktuator angetrieben wird.Der Roboter heißt: Einzelaktuator-Wellenroboter oder SAW. Seine wellenförmige Struktur drückt ihn vorwärts oder rückwärts. Für Kurven benötigen Sie Lenkräder. Ein solches Design bewegt sich nicht nur gut an Land, sondern kann auch in engen Spalten klettern und im Wasser schwimmen.Forscher sagen, dass Krabbelprinzipien von Schlangen entlehnt sind. Obwohl der Verlauf des SAW-Roboters mit den Methoden zum Bewegen des Wurms verglichen werden kann, ist die Analogie willkürlich. Der Körper eines Regenwurms wird durch Ausdünnung in einem Teil verlängert. Das vordere Ende rückt vor, gefolgt vom hinteren, das sich zusammenzieht. Der Vorgang wird wiederholt. SAW ist eine Sinuskurve an der Oberfläche. Die Bewegungsprinzipien des Roboters ähneln denen einiger kleiner Meerestiere in viel kleinerem Maßstab: Mikroskopische Organismen schweben mit Hilfe eines Flagellums.Videodemonstration des Roboters.Minimalismus, Bewegungsfreiheit und hohe Leistung - daran arbeitet Zarruk schon lange. In einem Interview mit der Zeitschrift IEEE Spectrum sagte Zarruk, dass er bereits 2004 als Student versucht habe, eine Wellenbewegung nachzubilden, die der in lebenden Organismen ähnelt. Während der Promotion kam Zarruk auf die Idee, Wellenbewegungen für Systeme im Verdauungssystem einzusetzen. Ein einfaches System mit einem Motor kann reduziert und verwendet werden, um sich im Darm zu bewegen.Vor ein paar Jahren unterrichtete Zarruk einen Produktdesignkurs und sprach über Federn. Dann bemerkte er, dass in einer Projektion die Feder ein Kreis ist, in der anderen eine Sinuskurve. Wenn sich die Feder dreht, bewegt sich die Welle unkompliziert. Die Einfachheit der Bewegungsprinzipien interessierte den Forscher. Oberes Bild: Der Motor dreht eine Spirale relativ zum Gehäuse. Bild unten: 25 Glieder umkreisen die Spirale, sie sind am Körper befestigt und drehen sich nicht.
SAW hat einen Motor. Er dreht die Wirbelsäule des Roboters - eine starre Spirale. Letzteres ist von einer Reihe von Links umgeben, die auf einem 3D-Drucker gedruckt sind. Diese Glieder sind wie Teile einer Fahrradkette in einer Ebene beweglich. Die Spirale dreht sich und die Glieder gehen auf und ab. Gleichzeitig bewegen sich die Glieder so, dass sie bei Kontakt mit der Oberfläche den Roboter nach vorne schieben.
Wenn Sie Bewegung benötigen, kann das Gerät auf Räder und Schienen zurückgreifen, gehen oder in die exotische Ebene des Krabbelns und Schwimmens gehen. Es gibt viele Möglichkeiten, den Roboter in Bewegung zu setzen. Manchmal scheint es sogar so, als könne nichts Neues erfunden werden. Dies ist jedoch weit davon entfernt. In einem kürzlich veröffentlichten Artikel beschreibt David Zarruk von der Ben-Gurion-Universität des Negev einen wellenförmigen Wurmroboter, der von nur einem Aktuator angetrieben wird.Der Roboter heißt: Einzelaktuator-Wellenroboter oder SAW. Seine wellenförmige Struktur drückt ihn vorwärts oder rückwärts. Für Kurven benötigen Sie Lenkräder. Ein solches Design bewegt sich nicht nur gut an Land, sondern kann auch in engen Spalten klettern und im Wasser schwimmen.Forscher sagen, dass Krabbelprinzipien von Schlangen entlehnt sind. Obwohl der Verlauf des SAW-Roboters mit den Methoden zum Bewegen des Wurms verglichen werden kann, ist die Analogie willkürlich. Der Körper eines Regenwurms wird durch Ausdünnung in einem Teil verlängert. Das vordere Ende rückt vor, gefolgt vom hinteren, das sich zusammenzieht. Der Vorgang wird wiederholt. SAW ist eine Sinuskurve an der Oberfläche. Die Bewegungsprinzipien des Roboters ähneln denen einiger kleiner Meerestiere in viel kleinerem Maßstab: Mikroskopische Organismen schweben mit Hilfe eines Flagellums.Videodemonstration des Roboters.Minimalismus, Bewegungsfreiheit und hohe Leistung - daran arbeitet Zarruk schon lange. In einem Interview mit der Zeitschrift IEEE Spectrum sagte Zarruk, dass er bereits 2004 als Student versucht habe, eine Wellenbewegung nachzubilden, die der in lebenden Organismen ähnelt. Während der Promotion kam Zarruk auf die Idee, Wellenbewegungen für Systeme im Verdauungssystem einzusetzen. Ein einfaches System mit einem Motor kann reduziert und verwendet werden, um sich im Darm zu bewegen.Vor ein paar Jahren unterrichtete Zarruk einen Produktdesignkurs und sprach über Federn. Dann bemerkte er, dass in einer Projektion die Feder ein Kreis ist, in der anderen eine Sinuskurve. Wenn sich die Feder dreht, bewegt sich die Welle unkompliziert. Die Einfachheit der Bewegungsprinzipien interessierte den Forscher. Oberes Bild: Der Motor dreht eine Spirale relativ zum Gehäuse. Bild unten: 25 Glieder umkreisen die Spirale, sie sind am Körper befestigt und drehen sich nicht.
SAW hat einen Motor. Er dreht die Wirbelsäule des Roboters - eine starre Spirale. Letzteres ist von einer Reihe von Links umgeben, die auf einem 3D-Drucker gedruckt sind. Diese Glieder sind wie Teile einer Fahrradkette in einer Ebene beweglich. Die Spirale dreht sich und die Glieder gehen auf und ab. Gleichzeitig bewegen sich die Glieder so, dass sie bei Kontakt mit der Oberfläche den Roboter nach vorne schieben.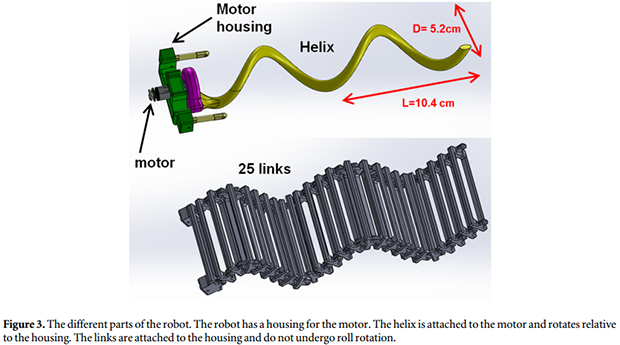
 Die Welle geht von rechts nach links und die mit der Erde in Kontakt stehenden Verbindungen bewegen sich leicht nach links und drehen sich im Uhrzeigersinn.Der SAW-Roboter kann sich nur vorwärts oder rückwärts bewegen. Zum Umkehren reicht es aus, die Spirale in die entgegengesetzte Richtung zu drehen. Zwei Räder am Gehäuse helfen ihm beim Lenken, die sonst passiv sind: Sie treiben das Gerät nicht an. Es scheint, dass die einzige Möglichkeit, die Bewegung zu beschleunigen, darin besteht, die Spirale schneller zu drehen. Die Forscher haben den Verbindungen jedoch Zähne hinzugefügt, mit denen Sie in sechs Zyklen Bewegungen mit sieben Wellen ausführen können. Die Geschwindigkeit stieg also um 13%. Spezielle Zähne stören die sich relativ zueinander bewegenden Glieder nicht.
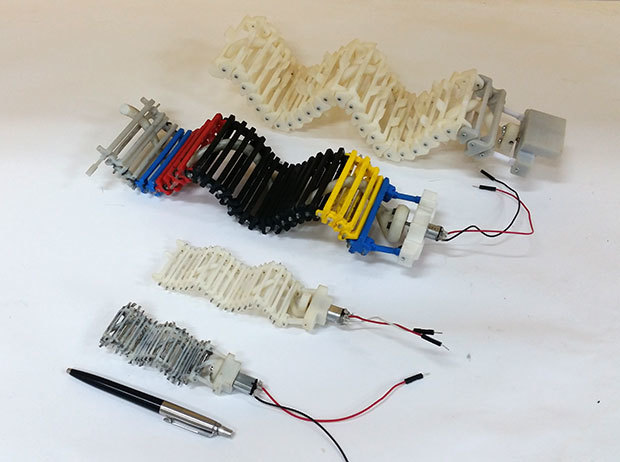
Die Welle geht von rechts nach links und die mit der Erde in Kontakt stehenden Verbindungen bewegen sich leicht nach links und drehen sich im Uhrzeigersinn.Der SAW-Roboter kann sich nur vorwärts oder rückwärts bewegen. Zum Umkehren reicht es aus, die Spirale in die entgegengesetzte Richtung zu drehen. Zwei Räder am Gehäuse helfen ihm beim Lenken, die sonst passiv sind: Sie treiben das Gerät nicht an. Es scheint, dass die einzige Möglichkeit, die Bewegung zu beschleunigen, darin besteht, die Spirale schneller zu drehen. Die Forscher haben den Verbindungen jedoch Zähne hinzugefügt, mit denen Sie in sechs Zyklen Bewegungen mit sieben Wellen ausführen können. Die Geschwindigkeit stieg also um 13%. Spezielle Zähne stören die sich relativ zueinander bewegenden Glieder nicht. Es wurden mehrere Modelle unterschiedlicher Größe hergestellt. Die größte (mehrfarbige) hat eine Geschwindigkeit von 5,6 Wellen pro Sekunde oder 57 Zentimeter pro Sekunde. Es kann mit einer Geschwindigkeit von 8 cm / s zwischen zwei eng eingestellten Oberflächen aufsteigen. In einem wasserdichten Gehäuse schwimmt das Modell mit einer Geschwindigkeit von 6 cm / s. SAW arbeitet nicht nur auf dem flachen Boden des Labors, es überwindet das Gelände und passiert Steine und Gras. SAW ist nicht nur ein Spielzeug. Jetzt wurde es auf die Größe eines Stifts reduziert (das niedrigste Beispiel auf dem Foto oben). In Zukunft kann der Roboter so miniaturisiert werden, dass er den menschlichen Darm entfernen und Proben für die Biopsie entnehmen kann. Die Arbeiten zur weiteren Reduzierung sind bereits im Gange.Laut Zarruk ist der Roboter fast wartungsfrei, was für die dynamische Struktur des 3D-Drucks ungewöhnlich ist. In Zukunft wird das Rollsystem geändert - das derzeitige ist nicht zu elegant. Forscher möchten versuchen, zwei SAW-Roboter über ein Scharnier miteinander zu verbinden. Und wenn sich herausstellt, dass sich die Frequenz der Wellen und ihre Amplitude im laufenden Betrieb ändern, kann sich der Roboter besser an verschiedene Oberflächen anpassen, sich durch Rohre mit vielen Durchmessern winden und die Bewegung für jede Flüssigkeit optimieren.Wellenförmiger Einzelaktuatorroboter (SAW): Entwurf, Modellierung und Experimente
Es wurden mehrere Modelle unterschiedlicher Größe hergestellt. Die größte (mehrfarbige) hat eine Geschwindigkeit von 5,6 Wellen pro Sekunde oder 57 Zentimeter pro Sekunde. Es kann mit einer Geschwindigkeit von 8 cm / s zwischen zwei eng eingestellten Oberflächen aufsteigen. In einem wasserdichten Gehäuse schwimmt das Modell mit einer Geschwindigkeit von 6 cm / s. SAW arbeitet nicht nur auf dem flachen Boden des Labors, es überwindet das Gelände und passiert Steine und Gras. SAW ist nicht nur ein Spielzeug. Jetzt wurde es auf die Größe eines Stifts reduziert (das niedrigste Beispiel auf dem Foto oben). In Zukunft kann der Roboter so miniaturisiert werden, dass er den menschlichen Darm entfernen und Proben für die Biopsie entnehmen kann. Die Arbeiten zur weiteren Reduzierung sind bereits im Gange.Laut Zarruk ist der Roboter fast wartungsfrei, was für die dynamische Struktur des 3D-Drucks ungewöhnlich ist. In Zukunft wird das Rollsystem geändert - das derzeitige ist nicht zu elegant. Forscher möchten versuchen, zwei SAW-Roboter über ein Scharnier miteinander zu verbinden. Und wenn sich herausstellt, dass sich die Frequenz der Wellen und ihre Amplitude im laufenden Betrieb ändern, kann sich der Roboter besser an verschiedene Oberflächen anpassen, sich durch Rohre mit vielen Durchmessern winden und die Bewegung für jede Flüssigkeit optimieren.Wellenförmiger Einzelaktuatorroboter (SAW): Entwurf, Modellierung und ExperimenteSource: https://habr.com/ru/post/de396323/
All Articles