Anleitung zum Erstellen mechanischer Tentakel zu Hause: Teil 1
 Wie mögen wir Animatronik nicht? Biegen Sie die Silikonhaut einer Puppe, und Sie öffnen eine Ansammlung mechatronischer Magie, die ihr Leben auf der großen Leinwand gibt. Ich habe im Internet nach gutem Einführungsmaterial zu diesem Thema gesucht, aber nur eines gefunden - Lehrvideos von Stan Winston . Nach 30 Sekunden spürte ich, wie die Tentakel meine grundlegendsten Wünsche nach dem Bau greifbarer Dinge weckten. Ich zerquetsche, ich musste nur so etwas bauen ... oder mehrere. Und hier erfahren Sie, wie Sie ein sehr reales animatronisches Tentakel erstellen.
Wie mögen wir Animatronik nicht? Biegen Sie die Silikonhaut einer Puppe, und Sie öffnen eine Ansammlung mechatronischer Magie, die ihr Leben auf der großen Leinwand gibt. Ich habe im Internet nach gutem Einführungsmaterial zu diesem Thema gesucht, aber nur eines gefunden - Lehrvideos von Stan Winston . Nach 30 Sekunden spürte ich, wie die Tentakel meine grundlegendsten Wünsche nach dem Bau greifbarer Dinge weckten. Ich zerquetsche, ich musste nur so etwas bauen ... oder mehrere. Und hier erfahren Sie, wie Sie ein sehr reales animatronisches Tentakel erstellen.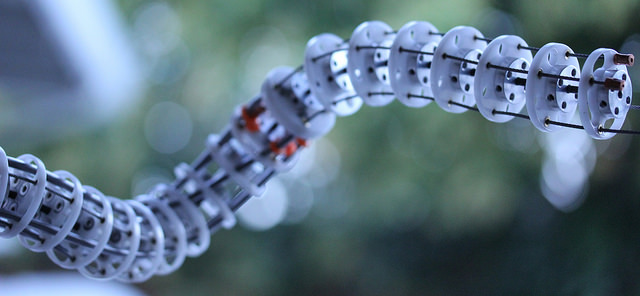 Anfänger sind eigentlich besser dran, den Tauchgang mit Stan Winstons Tutorials zu beginnen. In zwei Stunden beschreibt der Ausbilder Richard Landon die allgemeine Essenz, die notwendigen Komponenten und Techniken, um den Tentakelmechanismus mit einer Reihe typischer Werkzeuge herzustellen - ganz zu schweigen von einer Reihe großartiger Beispiele aus dem Film. [1]Wir haben auch die Möglichkeit, einen Blick in die Welt der Herstellung komplexerer Geräte zu werfen, die auf denselben Prinzipien basieren. Ich möchte die Geschichte von dem Moment an beginnen, in dem sie endet - mit zweistufigen Tentakeln, die sich auf vier Seiten biegen. Außerdem werde ich das Design der Tentakel von Landon einmal ändern. Damit können Sie aus nur wenigen vorgefertigten Komponenten, Polyformaldehyd , Ihr eigenes Tentakel und Ihren eigenen Controller bauen [derlin] und der Laserschneider ... Okay, und aus ein paar Teilen, die auf einem 3D-Drucker gedruckt wurden.
Anfänger sind eigentlich besser dran, den Tauchgang mit Stan Winstons Tutorials zu beginnen. In zwei Stunden beschreibt der Ausbilder Richard Landon die allgemeine Essenz, die notwendigen Komponenten und Techniken, um den Tentakelmechanismus mit einer Reihe typischer Werkzeuge herzustellen - ganz zu schweigen von einer Reihe großartiger Beispiele aus dem Film. [1]Wir haben auch die Möglichkeit, einen Blick in die Welt der Herstellung komplexerer Geräte zu werfen, die auf denselben Prinzipien basieren. Ich möchte die Geschichte von dem Moment an beginnen, in dem sie endet - mit zweistufigen Tentakeln, die sich auf vier Seiten biegen. Außerdem werde ich das Design der Tentakel von Landon einmal ändern. Damit können Sie aus nur wenigen vorgefertigten Komponenten, Polyformaldehyd , Ihr eigenes Tentakel und Ihren eigenen Controller bauen [derlin] und der Laserschneider ... Okay, und aus ein paar Teilen, die auf einem 3D-Drucker gedruckt wurden.
Wie funktionieren zweistufige Tentakeln?
hackadaycom.files.wordpress.com/2016/08/tentacle_arc_aproximation.pngBeide Stufen des Tentakels, von denen jede zwei Freiheitsgrade hatDas Tentakel hat zwei Stufen, von denen jede zwei Freiheitsgrade hat. Sie ermöglichen es jedem Schritt, sich in zwei senkrechten Richtungen zu biegen. Wenn wir diese Freiheitsgrade kombinieren, erhalten wir insgesamt vier, die es uns ermöglichen, völlig plausible organische Bewegungen zu emulieren. Wenn Sie sich die Animation ansehen, sehen Sie die Kreuzung der beiden Stufen - ungefähr in der Mitte des Tentakels.Bei guter Montage können wir beide Teile unabhängig voneinander steuern. Idealerweise. In Wirklichkeit gibt es nichts Perfektes und unsere Materialien haben ihre Grenzen. Wir müssen mit Spannung und Zwischenwirbelabstand spielen, bis wir zufriedenstellende Ergebnisse erzielen. Idealerweise erreichen wir durch Ziehen am Seil einer der Stufen einen idealen Bogen, dessen Durchmesser mit zunehmender Spannung abnimmt. Aufgrund von Reibungsverlusten in jedem der Wirbel können wir jedoch keinen idealen Bogen erzielen, obwohl das Ergebnis gut genug ist, um Menschen auf der anderen Seite des Bildschirms zu täuschen.Unter den Posen des Tentakels, die uns zur Verfügung stehen, gibt es keine Drehung um seine Achse. Dies geschah absichtlich, da Puppenspieler der Vergangenheit solche Bewegungen als unnatürlich betrachteten - zum Beispiel für Katzenschwänze oder Elefantenstämme. [1].
Idealerweise erreichen wir durch Ziehen am Seil einer der Stufen einen idealen Bogen, dessen Durchmesser mit zunehmender Spannung abnimmt. Aufgrund von Reibungsverlusten in jedem der Wirbel können wir jedoch keinen idealen Bogen erzielen, obwohl das Ergebnis gut genug ist, um Menschen auf der anderen Seite des Bildschirms zu täuschen.Unter den Posen des Tentakels, die uns zur Verfügung stehen, gibt es keine Drehung um seine Achse. Dies geschah absichtlich, da Puppenspieler der Vergangenheit solche Bewegungen als unnatürlich betrachteten - zum Beispiel für Katzenschwänze oder Elefantenstämme. [1].Tentakelskizze
Um das Funktionsprinzip zu verstehen, werden wir ein raues Tentakel aus zwei Platten und einem flexiblen Kern bauen. Hier ist eine Zeichnung unseres Embryos: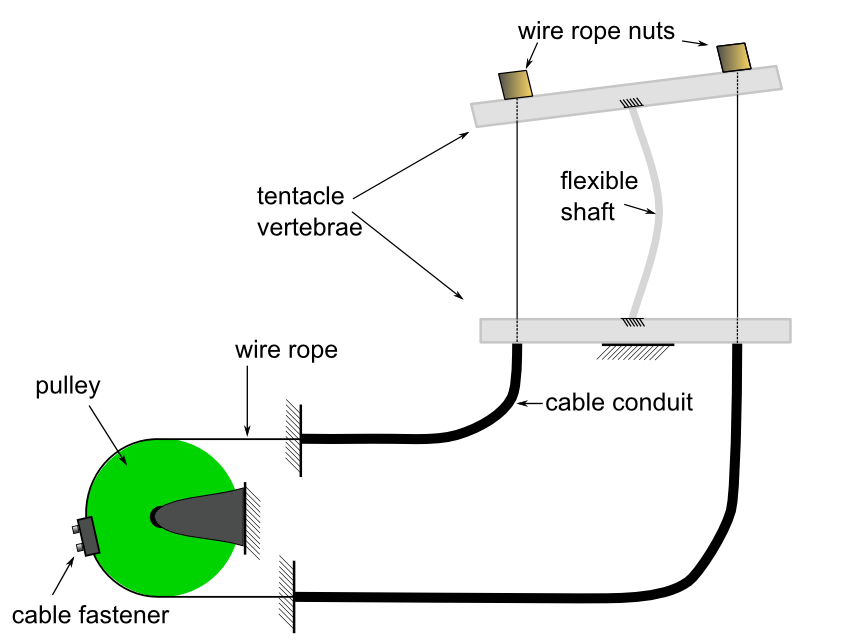 Indem wir der Riemenscheibe eine Drehung verleihen, schwächen wir ein Kabel und ziehen ein anderes im gleichen Abstand. Durch Verkürzen der Länge wird der Tentakel in Richtung Draht gebogen. Da die Kabel nur Spannung übertragen, müssen sie mit komplementären Kabeln gepaart werden, um eine Bewegung mit voller Amplitude in beide Richtungen entlang eines der Freiheitsgrade sicherzustellen. Daher müssen wir mit 8 verschiedenen Kabeln arbeiten.Der Tentakel behält seine Form aufgrund seiner zwei Merkmale. Erstens widersteht die Kabelleitung der Kompression. Zweitens werden die Kabel festgezogen und fest mit der Riemenscheibe verbunden. Das Ändern der Kabellänge ist die einzige Möglichkeit, den Wirbel zu bewegen, und der Kabelkanal ändert die Länge nicht. Daher fixiert die Riemenscheibenbefestigung auch das Tentakel.
Indem wir der Riemenscheibe eine Drehung verleihen, schwächen wir ein Kabel und ziehen ein anderes im gleichen Abstand. Durch Verkürzen der Länge wird der Tentakel in Richtung Draht gebogen. Da die Kabel nur Spannung übertragen, müssen sie mit komplementären Kabeln gepaart werden, um eine Bewegung mit voller Amplitude in beide Richtungen entlang eines der Freiheitsgrade sicherzustellen. Daher müssen wir mit 8 verschiedenen Kabeln arbeiten.Der Tentakel behält seine Form aufgrund seiner zwei Merkmale. Erstens widersteht die Kabelleitung der Kompression. Zweitens werden die Kabel festgezogen und fest mit der Riemenscheibe verbunden. Das Ändern der Kabellänge ist die einzige Möglichkeit, den Wirbel zu bewegen, und der Kabelkanal ändert die Länge nicht. Daher fixiert die Riemenscheibenbefestigung auch das Tentakel.Die Rolle des Kabelkanals
Der Kabelkanal spielt im Projekt eine wichtige Rolle. Ohne sie würde die Bewegung der oberen Stufe zu parasitären Bewegungen der unteren Stufe führen, und wir brauchen dies nicht. Wir müssen beide Schritte unabhängig voneinander steuern.Über den Kabelkanal können Sie die Krafteinwirkung von einem Ende des Kanals auf das andere umleiten, ohne dass störende Einflüsse auftreten. Der Kanal muss flexibel bleiben und gleichzeitig der Kompression widerstehen.Es ist interessant, dass wir in unserem Schema jeden Punkt auf dem Kabelkanal übernehmen und ohne Widerstand bewegen können, weil:1. Der Kanal flexibel ist.2. Sein zentraler Teil, entlang dem das Kabel verläuft, ändert die Länge nicht.Die Biegungen des Kanals ändern seine Länge nicht, sodass wir ihn nach Belieben biegen können und der Tentakel bewegungslos bleibt. Bequem!Dies ermöglicht es uns, zwei Dinge gleichzeitig zu tun: die Kabel, die die obere Stufe steuern, durch die untere Stufe zu strecken und die obere Stufe durch die untere Stufe zu steuern, ohne diese zu beeinflussen.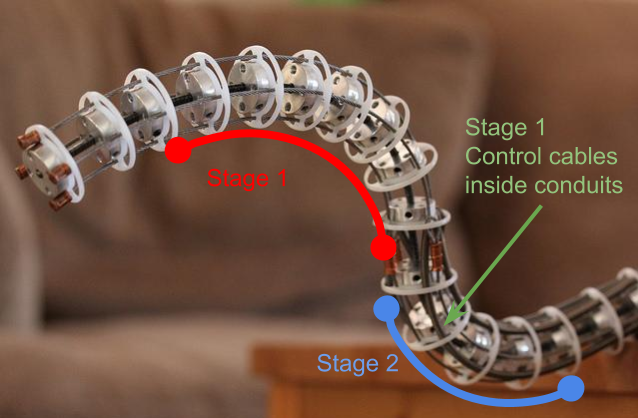 Das Bild zeigt, dass die Kabel, die die 1. Stufe steuern, die 2. Stufe durchlaufen.
Das Bild zeigt, dass die Kabel, die die 1. Stufe steuern, die 2. Stufe durchlaufen.Ersatzteile
Hauptmaterial
 Reibungslose Bewegungen entlang aller Freiheitsgrade werden erreicht, indem Tentakel aus Materialien hergestellt werden, die einer Rotation um ihre Achse widerstehen. Die meisten Menschen verwenden Kabel für Tachometer von alten Autos, die genau diese Eigenschaft haben. [1] Ich habe solche Kabel auch zum ersten Mal verwendet. Leider beträgt ihr Durchmesser nur eins: 0,125 Zoll, weshalb es unmöglich ist, eine große Puppe herzustellen, die sich nicht unter ihrem eigenen Gewicht verbiegt. Jetzt bevorzuge ich flexible Wellen von Drehwerkzeugen . Die meisten Bilder in diesem Artikel werden jedoch mit Tachokabeln erstellt.
Reibungslose Bewegungen entlang aller Freiheitsgrade werden erreicht, indem Tentakel aus Materialien hergestellt werden, die einer Rotation um ihre Achse widerstehen. Die meisten Menschen verwenden Kabel für Tachometer von alten Autos, die genau diese Eigenschaft haben. [1] Ich habe solche Kabel auch zum ersten Mal verwendet. Leider beträgt ihr Durchmesser nur eins: 0,125 Zoll, weshalb es unmöglich ist, eine große Puppe herzustellen, die sich nicht unter ihrem eigenen Gewicht verbiegt. Jetzt bevorzuge ich flexible Wellen von Drehwerkzeugen . Die meisten Bilder in diesem Artikel werden jedoch mit Tachokabeln erstellt.Segmente
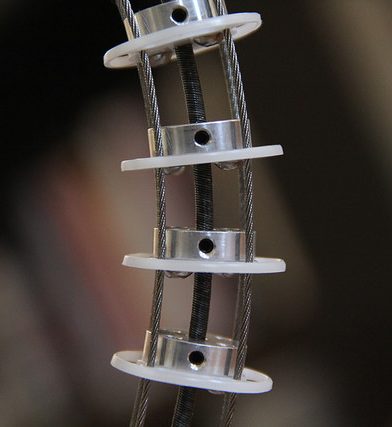
 Jedes Wirbelsegment muss fest fixiert sein, damit es nicht verrutscht und sich dreht. Sie müssen das Kabel korrekt führen und an den richtigen Stellen - dem Kabelkanal - fest mit dem Tachowelle verbunden sein. Landon verwendet hierfür Aluminiumteile, die auf einer CNC-Maschine hergestellt wurden. Aber ich stöberte in den Läden und fand einen einfacheren Weg mit vorgefertigten Komponenten. Heutzutage sind Ersatzteile für Roboter aufgrund der Verbreitung dieses Hobbys sehr beliebt, und ich konnte Wirbel aus der Universalhülse des Pololu (Pololu Universal Aluminium Mounting Hub) und Platten aus Polyformaldehyd (Derlin) herstellen.
Jedes Wirbelsegment muss fest fixiert sein, damit es nicht verrutscht und sich dreht. Sie müssen das Kabel korrekt führen und an den richtigen Stellen - dem Kabelkanal - fest mit dem Tachowelle verbunden sein. Landon verwendet hierfür Aluminiumteile, die auf einer CNC-Maschine hergestellt wurden. Aber ich stöberte in den Läden und fand einen einfacheren Weg mit vorgefertigten Komponenten. Heutzutage sind Ersatzteile für Roboter aufgrund der Verbreitung dieses Hobbys sehr beliebt, und ich konnte Wirbel aus der Universalhülse des Pololu (Pololu Universal Aluminium Mounting Hub) und Platten aus Polyformaldehyd (Derlin) herstellen.Steuerkabel
 Nehmen Sie das Steuerkabel wie bei Fahrrädern, aber die Wahrheit ist dünner. Ich habe erfolgreich zwei Kabeldurchmesser verwendet - 1,2 mm und 0,8 mm. Sie können teure Kabel verwenden, die so verarbeitet werden, dass sie nicht zotteln, oder nur das abgeschnittene Ende des Kabels leuchten lassen, bis es leuchtet. [3]
Nehmen Sie das Steuerkabel wie bei Fahrrädern, aber die Wahrheit ist dünner. Ich habe erfolgreich zwei Kabeldurchmesser verwendet - 1,2 mm und 0,8 mm. Sie können teure Kabel verwenden, die so verarbeitet werden, dass sie nicht zotteln, oder nur das abgeschnittene Ende des Kabels leuchten lassen, bis es leuchtet. [3]Kabelkanal
Es gibt viele Optionen für den Kanal - Nylonschläuche, ein Geflecht von einem Fahrrad, Federn. Wir brauchen nur, dass der Kanal der Kompression widersteht und flexibel ist. Der Widerstand gegen Kompression sollte eine "gleiche und entgegengesetzte" Kraft für die Bewegung bereitstellen. Flexibilität ist erforderlich, damit der Kanal andere Abschnitte des Tentakels zum Biegen nicht beeinträchtigt. Für einstufige Mechanismen ist jede der aufgeführten Optionen geeignet. Für mehrstufige Flexibilität ist wichtiger. Nach meiner Erfahrung waren Zugfedern bisher am besten als das flexibelste aller Materialien geeignet.Sie können alles im McMaster-Carr Store kaufen, wenn Sie den richtigen Namen kennen. Unser Kabelkanal heißt "Durchlauffeder mit kontinuierlicher Länge" ( 9664K12 ) und kostet nur 4,40 USD pro 36 Zoll. [300 rub / m]Kleinere Federn können bei Dr. Und Co Templeman . Die Kosten für die Federn werden höher sein, aber das Sortiment ist reicher. Bei Molex finden sich sehr kleine Durchmesser .
Flexibilität ist erforderlich, damit der Kanal andere Abschnitte des Tentakels zum Biegen nicht beeinträchtigt. Für einstufige Mechanismen ist jede der aufgeführten Optionen geeignet. Für mehrstufige Flexibilität ist wichtiger. Nach meiner Erfahrung waren Zugfedern bisher am besten als das flexibelste aller Materialien geeignet.Sie können alles im McMaster-Carr Store kaufen, wenn Sie den richtigen Namen kennen. Unser Kabelkanal heißt "Durchlauffeder mit kontinuierlicher Länge" ( 9664K12 ) und kostet nur 4,40 USD pro 36 Zoll. [300 rub / m]Kleinere Federn können bei Dr. Und Co Templeman . Die Kosten für die Federn werden höher sein, aber das Sortiment ist reicher. Bei Molex finden sich sehr kleine Durchmesser .Biegepunkt
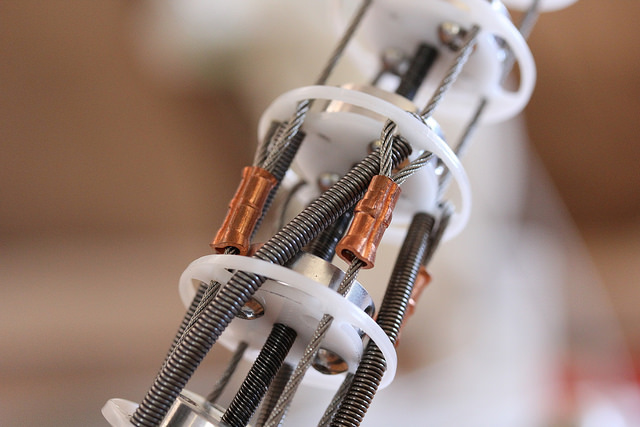 Zum ersten Mal fiel es mir schwer, mir das Design dieses Elements vorzustellen. Nachdem Sie die Position der Kabelenden verstanden haben, ist dieser Teil leicht zu konstruieren. Jedes Kabel, das den unteren Abschnitt steuert, endet in einer Schleife. Am selben Wirbel enden die Kabelkanäle, die den folgenden Satz Steuerkabel enthalten. Von dort geht der nächste Kabelsatz weiter.
Zum ersten Mal fiel es mir schwer, mir das Design dieses Elements vorzustellen. Nachdem Sie die Position der Kabelenden verstanden haben, ist dieser Teil leicht zu konstruieren. Jedes Kabel, das den unteren Abschnitt steuert, endet in einer Schleife. Am selben Wirbel enden die Kabelkanäle, die den folgenden Satz Steuerkabel enthalten. Von dort geht der nächste Kabelsatz weiter.Alternative Designs
Könnten wir anderes Material für die Wirbel verwenden, zum Beispiel Holz - um Metallbuchsen zu sparen? Vielleicht, aber ein solches Design wurde nicht nur so gemacht, sondern mit einer Berechnung.Erstens muss die Komplexität des Designs entweder mit fertigen Teilen oder einer kostengünstigen Herstellungsmethode (Laserschneider und 3D-Drucker) ausgeglichen werden. Daher können auch Menschen mit atypischem Auge und Geschicklichkeit ein solches Design erstellen.Zweitens muss die Technologie zur Herstellung von Prototypen deterministisch und wiederholbar sein. Das Gerät sollte sich gleich verhalten und in jedem Teil der Welt hergestellt werden. Sie müssen keine Magie üben und zu den Göttern des Leims beten, die auf einem Bein stehen, während Ihr Epoxidharz bei ungewöhnlicher Luftfeuchtigkeit aushärtet. Einfache Technologien, die sich überall und immer gleich verhalten.Suchen Sie aber selbst nach Designalternativen. Ich habe den Controller und das Tentakel fertiggestellt, aber das bedeutet nicht, dass die Arbeit abgeschlossen ist. Wenn der dritte Teil des Artikels abgeschlossen ist, liegt die gesamte Entwicklung in Ihren Händen, und Sie können damit tun, was Sie wollen.Teil 2Referenzen
[1] Grundlagen des Stan Winston- KabelmechanismusAusführliches Tutorial zum Erstellen einfacher Tentakel[2] Animatronics-Demo mit Rick Lazzarini 1:21:01Beispiele für die Verwendung von Tachokabeln[3] CS235: Angewandtes Roboterdesign, Vorlesung 7 - Einführung in KabelübertragungenEinführung über die Verwendung von Kabeln in der RobotikSource: https://habr.com/ru/post/de398165/
All Articles