Zukünftige Roboter lernen durch Neugier und Selbstbestimmung der Ziele
 Stellen Sie sich vor, ein Freund bittet Sie, sein Zimmer mit verschiedenen Dingen und Möbeln aufzuräumen. Aber stellen Sie sich auch vor, dass er Ihnen dabei nicht helfen wird, sondern Ihnen einfach beschreiben und den Fotos zeigen wird, wie sein Zimmer am Ende aussehen soll. Die Aufgabe mag langweilig erscheinen, aber jeder von uns wird damit fertig werden. Als Kinder entdeckten wir neue Objekte, lernten sie zu erkennen und entwickelten Fähigkeiten im Umgang mit ihnen. Aus Neugier entwickelten wir nach und nach visuelles, aufmerksames und sensorisch-motorisches Wissen, das es uns Erwachsenen ermöglichte, unsere physische Umgebung unserer Wahl zu behandeln.Die heutigen Roboter sind für solche Aufgaben nicht geeignet. Stellen Sie sich einen humanoiden Roboter vor, der dabei hilft, einen Raum aufzuräumen. Angenommen, Sie haben einem Roboter einen Raum in einem normalen, gereinigten Zustand gezeigt, und wenn sich darin ein Durcheinander befindet, befehlen Sie dem Roboter, ihn in seinen ursprünglichen Zustand zu entfernen. Unter solchen Bedingungen wäre es sehr anstrengend, dem Roboter beizubringen, wohin er die Aufmerksamkeit lenken und wie jedes der Objekte zu verwalten ist, um es an der richtigen Stelle am richtigen Ort zu platzieren, oder wie man eine Abfolge von Aktionen erstellt.Und obwohl jährlich neue, komplexe Roboter und fortschrittliche Algorithmen erscheinen, erfordert die Ausführung komplexer Aufgaben und das Finden unbekannter Lösungen für verschiedene Aufgaben eine mühsame Programmierung von Details im Zusammenhang mit motorischen Fähigkeiten auf niedrigerem Niveau. Im besten Fall können Roboter eine kleine Reihe unflexibler Aktionen lernen. Wenn wir die aktuellen Errungenschaften der KI mit der biologischen Intelligenz vergleichen, werden wir sehen, dass die KI immer noch Einschränkungen in Bezug auf Autonomie und Flexibilität aufweist.Roboter der Zukunft müssen lernen können, ihre Umgebung autonom zu erfassen, dh Ziele unabhängig zu bestimmen und Fähigkeiten effektiv zu erwerben, um diese zu erreichen, basierend auf dem Erwerb, der Modifikation, der Verallgemeinerung und der Rekombination zuvor erworbener Kenntnisse und Fähigkeiten. Auf diese Weise können sie mit ein wenig zusätzlicher Schulung ihre Umgebung vom aktuellen Status in eine Vielzahl von Endzuständen ändern, die vom Benutzer als Ziel festgelegt wurden. Die Frage ist, wie wir Roboter der Zukunft schaffen können, die eine solche Aufgabe bewältigen können.
Stellen Sie sich vor, ein Freund bittet Sie, sein Zimmer mit verschiedenen Dingen und Möbeln aufzuräumen. Aber stellen Sie sich auch vor, dass er Ihnen dabei nicht helfen wird, sondern Ihnen einfach beschreiben und den Fotos zeigen wird, wie sein Zimmer am Ende aussehen soll. Die Aufgabe mag langweilig erscheinen, aber jeder von uns wird damit fertig werden. Als Kinder entdeckten wir neue Objekte, lernten sie zu erkennen und entwickelten Fähigkeiten im Umgang mit ihnen. Aus Neugier entwickelten wir nach und nach visuelles, aufmerksames und sensorisch-motorisches Wissen, das es uns Erwachsenen ermöglichte, unsere physische Umgebung unserer Wahl zu behandeln.Die heutigen Roboter sind für solche Aufgaben nicht geeignet. Stellen Sie sich einen humanoiden Roboter vor, der dabei hilft, einen Raum aufzuräumen. Angenommen, Sie haben einem Roboter einen Raum in einem normalen, gereinigten Zustand gezeigt, und wenn sich darin ein Durcheinander befindet, befehlen Sie dem Roboter, ihn in seinen ursprünglichen Zustand zu entfernen. Unter solchen Bedingungen wäre es sehr anstrengend, dem Roboter beizubringen, wohin er die Aufmerksamkeit lenken und wie jedes der Objekte zu verwalten ist, um es an der richtigen Stelle am richtigen Ort zu platzieren, oder wie man eine Abfolge von Aktionen erstellt.Und obwohl jährlich neue, komplexe Roboter und fortschrittliche Algorithmen erscheinen, erfordert die Ausführung komplexer Aufgaben und das Finden unbekannter Lösungen für verschiedene Aufgaben eine mühsame Programmierung von Details im Zusammenhang mit motorischen Fähigkeiten auf niedrigerem Niveau. Im besten Fall können Roboter eine kleine Reihe unflexibler Aktionen lernen. Wenn wir die aktuellen Errungenschaften der KI mit der biologischen Intelligenz vergleichen, werden wir sehen, dass die KI immer noch Einschränkungen in Bezug auf Autonomie und Flexibilität aufweist.Roboter der Zukunft müssen lernen können, ihre Umgebung autonom zu erfassen, dh Ziele unabhängig zu bestimmen und Fähigkeiten effektiv zu erwerben, um diese zu erreichen, basierend auf dem Erwerb, der Modifikation, der Verallgemeinerung und der Rekombination zuvor erworbener Kenntnisse und Fähigkeiten. Auf diese Weise können sie mit ein wenig zusätzlicher Schulung ihre Umgebung vom aktuellen Status in eine Vielzahl von Endzuständen ändern, die vom Benutzer als Ziel festgelegt wurden. Die Frage ist, wie wir Roboter der Zukunft schaffen können, die eine solche Aufgabe bewältigen können.GOAL-Robots-Projekt
Auf der Suche nach einer Antwort auf diese Frage wurde ein Projekt gestartet, das für den Einsatz von KI wichtig ist - das europäische Projekt, das vom Labor für Computational Verkörperte Neurowissenschaften , LOCEN, einer italienischen Forschungsgruppe am Institut für kognitive Wissenschaften und Technologie der italienischen staatlichen Forschung, betreut wird Ausschuss ( ISTC-CNR ).Das Projekt GOAL-Robots - Goal-based Open-Ended Autonomous Learning Robots belegte den ersten Platz in der Liste der 11 Projekte, die unter 800 Teilnehmern der EU-FET-OPEN- Telefonkonferenz finanziert wurden(Future Emergent Technologies) und ist Teil des EU-Forschungsprogramms Horizont 2020. LOCEN und sein Forschungsleiter, Gianluca Baldassarre, werden ein Konsortium koordinieren, dem drei weitere wichtige europäische Forschungsgruppen angehören:1. Labor für Psychologie und Wahrnehmung (LPP) aus Frankreich unter der Leitung von Kevin O'Regan, der am Pariser Institut für Neurologie und Kognitionswissenschaften arbeitet Descartes wird Experimente zum Erwerb von Fähigkeiten und Zielen bei Kindern durchführen.2. Das Frankfurter Institut für fortgeschrittene Studien (FIAS) in Deutschland unter der Leitung von Jochen Triesch wird sich auf die Entwicklung von visuellen Systemen und motorischen Fähigkeiten konzentrieren, die denen biologischer ähnlich sind.3.Ein Team von Robotik-Experten unter der Leitung von Jan Peters von der Technischen Universität Darmstadt (TUDa) in Deutschland demonstriert Roboter für das Projekt.GOAL-Robots folgt dem vorherigen europäischen Projekt IM-CLeVeR („intern motiviertes kumulatives Lernen von Universalrobotern“), in dem LOCEN und frühere Partner die Rolle der intrinsischen Motivation (VM) bei der Induktion des Selbstlernens in lebenden Organismen und in Robotern untersuchten. Die VM-Forschung begann mit der Beobachtung, wie Kinder aus Neugier die Außenwelt erkunden und mit ihr interagieren, Wissen über die Funktionsweise der Dinge erlangen und ein großes Repertoire an sensorisch-motorischen Fähigkeiten erwerben, um mit ihnen zu interagieren. Wenn Neugier und VMs die Grundlage menschlicher Universalität und Anpassungsfähigkeit sind, kann KI mit Architektur und Algorithmus, die VMs emulieren, dazu beitragen, eine „Motivationsmaschine“ zu schaffen, die Roboter durch einen autonomen offenen Lernprozess führt, der keine ständige Programmierung und menschliches Training erfordert.GOAL-Robots fügt auch eine wichtige Komponente zur Entwicklung eines offenen Robotertrainings hinzu: Ziele. Ein Ziel ist eine interne Darstellung einer Person über die Welt, den Zustand eines Körpers oder Ereignisses oder eine Reihe von Ereignissen, die zwei wichtige Eigenschaften haben. Erstens kann eine Person diese Idee auch dann hervorrufen, wenn der entsprechende Zustand der Welt oder des Ereignisses nicht wahrgenommen wird. Zweitens hat diese Herausforderung einen motivierenden Effekt, das heißt, sie kann die Auswahl beeinflussen, die Persönlichkeit und das Verhalten fokussieren und den Lernprozess zum Erreichen des Ziels führen. Die Fähigkeit, Motivationsziele nach Belieben zu erstellen, wenn auch abstrakt, und ihre Verwendung für die Auswahl von Aktionen und Training, ist ein Schlüsselelement der Verhaltensflexibilität und der Fähigkeit, biologische Individuen zu trainieren. Projektteilnehmer glaubenDie Bereitstellung von Mechanismen für Roboter, die zur Bildung und Verfolgung von Trainingszielen geeignet sind, erhöht das Potenzial für unabhängiges Lernen radikal.
Wenn Neugier und VMs die Grundlage menschlicher Universalität und Anpassungsfähigkeit sind, kann KI mit Architektur und Algorithmus, die VMs emulieren, dazu beitragen, eine „Motivationsmaschine“ zu schaffen, die Roboter durch einen autonomen offenen Lernprozess führt, der keine ständige Programmierung und menschliches Training erfordert.GOAL-Robots fügt auch eine wichtige Komponente zur Entwicklung eines offenen Robotertrainings hinzu: Ziele. Ein Ziel ist eine interne Darstellung einer Person über die Welt, den Zustand eines Körpers oder Ereignisses oder eine Reihe von Ereignissen, die zwei wichtige Eigenschaften haben. Erstens kann eine Person diese Idee auch dann hervorrufen, wenn der entsprechende Zustand der Welt oder des Ereignisses nicht wahrgenommen wird. Zweitens hat diese Herausforderung einen motivierenden Effekt, das heißt, sie kann die Auswahl beeinflussen, die Persönlichkeit und das Verhalten fokussieren und den Lernprozess zum Erreichen des Ziels führen. Die Fähigkeit, Motivationsziele nach Belieben zu erstellen, wenn auch abstrakt, und ihre Verwendung für die Auswahl von Aktionen und Training, ist ein Schlüsselelement der Verhaltensflexibilität und der Fähigkeit, biologische Individuen zu trainieren. Projektteilnehmer glaubenDie Bereitstellung von Mechanismen für Roboter, die zur Bildung und Verfolgung von Trainingszielen geeignet sind, erhöht das Potenzial für unabhängiges Lernen radikal.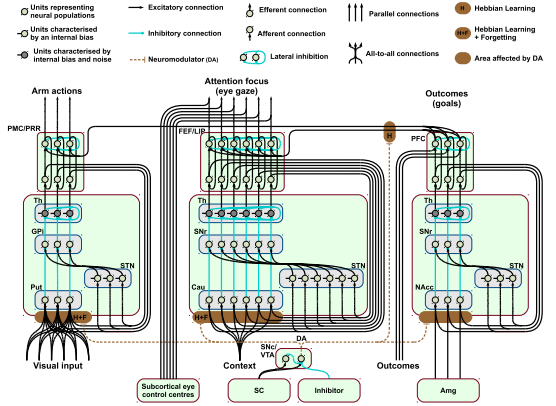
Aufgaben und Ideen
Die Projektidee ist eine Kombination von Mechanismen im Zusammenhang mit VM und motivierenden Energiezielen. Insbesondere wird VM Roboter dazu anregen, unabhängig neue interessante Ereignisse zu entdecken, die aufgrund ihrer eigenen Handlungen aufgetreten sind. Roboter erkunden ihre Umgebung unter dem Einfluss von Neugier und setzen sich immer komplexere Ziele, um verschiedene Fähigkeiten in einem offenen Stil zu erlangen. Ein offener Prozess zum Erwerb von Fähigkeiten erfordert komplexe Mechanismen und die Integration verschiedener Architekturkomponenten. Insbesondere müssen Roboter neue Fähigkeiten erwerben, ohne zuvor erworbene Fähigkeiten zu brechen, und gleichzeitig zuvor erworbene Fähigkeiten wiederverwenden, um den Erwerb neuer Fähigkeiten zu beschleunigen (Wissenstransfer). Darüber hinaus müssen sie lernen, wie sie vorab erworbene Fähigkeiten kombinieren, um komplexere zu erstellen. Dies sind die wichtigsten KI-Herausforderungen für heute. Um diese Probleme zu lösen, werden im Rahmen des Projekts fortschrittliche Algorithmen verwendet, um sensorische Informationen zu verarbeiten (z. B. mithilfe von Deep-Learning-Netzwerken) und um Kenntnisse in Bezug auf motorische Fähigkeiten zu organisieren und zu nutzen (z. B. mithilfe dynamischer Bewegungsprimitive und neuronaler Netzwerke mit Echoeffekt [Echo]) -Staatliche neuronale Netze]).Alle Mechanismen, die mit verschiedenen Teilen des Lernprozesses verbunden sind, müssen in eine Steuerungsarchitektur integriert werden: Übergeordnete Zielbildungsprozesse werden mit Motivationsschichten kombiniert, in denen der Roboter basierend auf der VM Ziele formt und auswählt. Die Ziele werden schrittweise mit der unteren Ebene der Steuerungen verknüpft, sodass der Roboter erworbene Fähigkeiten abrufen kann, um die gewünschten Ziele zu erreichen und komplexere Fähigkeiten basierend auf einer Kombination der vorherigen zu entwickeln. Der Wissenstransfer zwischen verschiedenen Fähigkeiten wird integriert, wobei die Notwendigkeit der Beseitigung gegenseitiger Eingriffe usw. berücksichtigt wird. Diese Mechanismen sind nicht nur für die unabhängige Lernphase nützlich, sondern auch für die Möglichkeit, das vom Benutzer erworbene Wissen zu nutzen.
Ein offener Prozess zum Erwerb von Fähigkeiten erfordert komplexe Mechanismen und die Integration verschiedener Architekturkomponenten. Insbesondere müssen Roboter neue Fähigkeiten erwerben, ohne zuvor erworbene Fähigkeiten zu brechen, und gleichzeitig zuvor erworbene Fähigkeiten wiederverwenden, um den Erwerb neuer Fähigkeiten zu beschleunigen (Wissenstransfer). Darüber hinaus müssen sie lernen, wie sie vorab erworbene Fähigkeiten kombinieren, um komplexere zu erstellen. Dies sind die wichtigsten KI-Herausforderungen für heute. Um diese Probleme zu lösen, werden im Rahmen des Projekts fortschrittliche Algorithmen verwendet, um sensorische Informationen zu verarbeiten (z. B. mithilfe von Deep-Learning-Netzwerken) und um Kenntnisse in Bezug auf motorische Fähigkeiten zu organisieren und zu nutzen (z. B. mithilfe dynamischer Bewegungsprimitive und neuronaler Netzwerke mit Echoeffekt [Echo]) -Staatliche neuronale Netze]).Alle Mechanismen, die mit verschiedenen Teilen des Lernprozesses verbunden sind, müssen in eine Steuerungsarchitektur integriert werden: Übergeordnete Zielbildungsprozesse werden mit Motivationsschichten kombiniert, in denen der Roboter basierend auf der VM Ziele formt und auswählt. Die Ziele werden schrittweise mit der unteren Ebene der Steuerungen verknüpft, sodass der Roboter erworbene Fähigkeiten abrufen kann, um die gewünschten Ziele zu erreichen und komplexere Fähigkeiten basierend auf einer Kombination der vorherigen zu entwickeln. Der Wissenstransfer zwischen verschiedenen Fähigkeiten wird integriert, wobei die Notwendigkeit der Beseitigung gegenseitiger Eingriffe usw. berücksichtigt wird. Diese Mechanismen sind nicht nur für die unabhängige Lernphase nützlich, sondern auch für die Möglichkeit, das vom Benutzer erworbene Wissen zu nutzen. Das Projekt wird jedes Jahr einen „Demonstrationsroboter“ vorstellen, und komplexe Roboterplattformen (wie iCub oder Kuka) werden von im Projekt entwickelten Architekturen gesteuert, um Aufgaben mit zunehmender Komplexität zu lösen. Diese Demonstratoren zeigen nicht nur den Fortschritt des Projekts, sondern werden auch zu Kriterien für den Vergleich des Fortschritts bei der Entwicklung unabhängiger Roboter.Der letzte Demonstrator muss sich der am Anfang des Artikels formulierten Aufgabe stellen: Ist es dem Roboter möglich, Universalität und Anpassungsfähigkeit zu demonstrieren, die den menschlichen ähnlich sind und mit der realen Welt interagieren? Insbesondere erhalten die Roboter die Aufgabe: a) die Position mehrerer Objekte in Behältern und Regalen zu untersuchen, die der Bestellung entsprechen, und b) diesen Zustand zu reproduzieren, nachdem der Benutzer die Objekte bewegt und ausgetauscht hat.Wenn das GOAL-Robots-Projekt seine Versprechen erfüllt, müssen Sie sich keine Sorgen mehr um faule Freunde machen: Wenn sie Sie um Hilfe bitten, bitten Sie einfach Ihre künstlichen Freunde, ihnen zu helfen!
Das Projekt wird jedes Jahr einen „Demonstrationsroboter“ vorstellen, und komplexe Roboterplattformen (wie iCub oder Kuka) werden von im Projekt entwickelten Architekturen gesteuert, um Aufgaben mit zunehmender Komplexität zu lösen. Diese Demonstratoren zeigen nicht nur den Fortschritt des Projekts, sondern werden auch zu Kriterien für den Vergleich des Fortschritts bei der Entwicklung unabhängiger Roboter.Der letzte Demonstrator muss sich der am Anfang des Artikels formulierten Aufgabe stellen: Ist es dem Roboter möglich, Universalität und Anpassungsfähigkeit zu demonstrieren, die den menschlichen ähnlich sind und mit der realen Welt interagieren? Insbesondere erhalten die Roboter die Aufgabe: a) die Position mehrerer Objekte in Behältern und Regalen zu untersuchen, die der Bestellung entsprechen, und b) diesen Zustand zu reproduzieren, nachdem der Benutzer die Objekte bewegt und ausgetauscht hat.Wenn das GOAL-Robots-Projekt seine Versprechen erfüllt, müssen Sie sich keine Sorgen mehr um faule Freunde machen: Wenn sie Sie um Hilfe bitten, bitten Sie einfach Ihre künstlichen Freunde, ihnen zu helfen!Source: https://habr.com/ru/post/de398815/
All Articles