Multicopter lernte, auf den Dächern von fahrenden Autos zu sitzen
 Die Drohne sitzt mit einer Geschwindigkeit von 50 km / h auf dem Dach eines Autos.Die Fähigkeit von Multikoptern, statisch in der Luft zu hängen, macht sie zu einem hervorragenden Werkzeug für verschiedene Aufgaben, einschließlich Videoüberwachung, Paketzustellung oder Teilnahme an Such- und Rettungsaktionen. Gleichzeitig müssen sie sich mit einer begrenzten Akkulaufzeit und einer relativ geringen Reichweite abfinden. Die Batterieladung reicht nicht aus, um an den Ort zu gelangen, wenn er sich viele Kilometer von der Basis entfernt befindet. Ingenieure des Labors für mobile Roboter und autonome Systeme der Polytechnic School in Montreal (Kanada) schlugen eine originelle Lösung für das Problem vor: Einer Drohne wurde beigebracht, auf den Dächern vorbeifahrender Autos auf ihrer Route zu sitzenBewegung mit einer Geschwindigkeit von bis zu 50 km / h. Assoziierte Autos werden buchstäblich zu Flugzeugträgern.Wenn die Polizei das Recht hat, zivile Fahrzeuge für ihre Bedürfnisse einzusetzen, können Polizeidrohnen ihnen auch ein solches Recht einräumen. Man kann sich vorstellen, dass selbst für zivile Drohnen ein „kommerzielles Partnerschaftssystem“ eingeführt wird, so dass Fahrer eine geringe Gebühr zahlen, wenn ein unbemannter Passagier auf dem Dach befestigt ist. Mit einer Geschwindigkeit pro Kilometer. Der Multikopter erkennt Autos (anhand der GPS-Koordinaten und visuell) und sitzt nur auf den Dächern derjenigen, die am Partnerprogramm teilnehmen.Tatsächlich kann die Drohne mit der aktuellen Technologie einfach nicht auf den Dächern beliebiger Autos landen, da zum Zielen ein Dachlandeplatz mit einem speziellen schwarz-weißen AprilTag-Code erforderlich ist.
Die Drohne sitzt mit einer Geschwindigkeit von 50 km / h auf dem Dach eines Autos.Die Fähigkeit von Multikoptern, statisch in der Luft zu hängen, macht sie zu einem hervorragenden Werkzeug für verschiedene Aufgaben, einschließlich Videoüberwachung, Paketzustellung oder Teilnahme an Such- und Rettungsaktionen. Gleichzeitig müssen sie sich mit einer begrenzten Akkulaufzeit und einer relativ geringen Reichweite abfinden. Die Batterieladung reicht nicht aus, um an den Ort zu gelangen, wenn er sich viele Kilometer von der Basis entfernt befindet. Ingenieure des Labors für mobile Roboter und autonome Systeme der Polytechnic School in Montreal (Kanada) schlugen eine originelle Lösung für das Problem vor: Einer Drohne wurde beigebracht, auf den Dächern vorbeifahrender Autos auf ihrer Route zu sitzenBewegung mit einer Geschwindigkeit von bis zu 50 km / h. Assoziierte Autos werden buchstäblich zu Flugzeugträgern.Wenn die Polizei das Recht hat, zivile Fahrzeuge für ihre Bedürfnisse einzusetzen, können Polizeidrohnen ihnen auch ein solches Recht einräumen. Man kann sich vorstellen, dass selbst für zivile Drohnen ein „kommerzielles Partnerschaftssystem“ eingeführt wird, so dass Fahrer eine geringe Gebühr zahlen, wenn ein unbemannter Passagier auf dem Dach befestigt ist. Mit einer Geschwindigkeit pro Kilometer. Der Multikopter erkennt Autos (anhand der GPS-Koordinaten und visuell) und sitzt nur auf den Dächern derjenigen, die am Partnerprogramm teilnehmen.Tatsächlich kann die Drohne mit der aktuellen Technologie einfach nicht auf den Dächern beliebiger Autos landen, da zum Zielen ein Dachlandeplatz mit einem speziellen schwarz-weißen AprilTag-Code erforderlich ist. Das Dach eines gewöhnlichen Autos ist für die Ausstattung eines solchen Standorts nicht sehr geeignet. Die Entwickler des Systems sind der Ansicht, dass öffentliche Verkehrsmittel (Busse), Postwagen und Zustelldienste als Transportunternehmen geeignet sind. Diese Autos fahren aktiv durch die Stadt, so dass es für eine Drohne kein Problem ist, "kostenlos" ein Dutzend Kilometer an ihr Ziel zu springen.Theoretisch ist es möglich, die Dächer von Autos mit solchen Landeplätzen auszustatten. Während der Testflüge zeigten die Forscher, dass bereits eine relativ kleine Fläche des "Pkw" für die Landung ausreicht.
Das Dach eines gewöhnlichen Autos ist für die Ausstattung eines solchen Standorts nicht sehr geeignet. Die Entwickler des Systems sind der Ansicht, dass öffentliche Verkehrsmittel (Busse), Postwagen und Zustelldienste als Transportunternehmen geeignet sind. Diese Autos fahren aktiv durch die Stadt, so dass es für eine Drohne kein Problem ist, "kostenlos" ein Dutzend Kilometer an ihr Ziel zu springen.Theoretisch ist es möglich, die Dächer von Autos mit solchen Landeplätzen auszustatten. Während der Testflüge zeigten die Forscher, dass bereits eine relativ kleine Fläche des "Pkw" für die Landung ausreicht. Die Drohne sitzt mit einer Geschwindigkeit von 40 km / h auf dem Dach eines Personenkraftwagens.Ein Vorteil dieser Bewegungsmethode besteht darin, dass die Drohne auf dem Dach ihre Batterien aufladen kann. Somit werden zwei bestehende UAV-Probleme gleichzeitig gelöst - unzureichende Batterieleistung und kurze Reichweite.Das von kanadischen Ingenieuren entwickelte unbemannte Landesystem verwendet die GPS-Koordinaten eines Mobiltelefons, um nach einem Fahrzeug zu suchen, und erfordert während der Landung keine Koordination der Manöver zwischen dem UAV und dem Auto. Das heißt, der Fahrer benötigt überhaupt keine Unterstützung, außer für die Installation einer Landeplattform auf dem Dach mit einer visuellen Markierung und einem Mobiltelefon. Theoretisch bemerkt der Fahrer während der Fahrt möglicherweise nicht einmal, dass jemand sein Auto auf der Straße benutzt hat.Das Schlüsselelement bei der Landung der Drohne auf dem Dach des Autos sind die schwarzen und weißen visuellen Markierungen von AprilTag , die in letzter Zeit zunehmend in der Robotik eingesetzt werden. Solche Marker wurden 2011 von Olson entwickelt und spielen sowohl die Rolle der visuellen Identifizierung als auch der genauen 3D-Positionierung des Objekts relativ zur Kamera.
Die Drohne sitzt mit einer Geschwindigkeit von 40 km / h auf dem Dach eines Personenkraftwagens.Ein Vorteil dieser Bewegungsmethode besteht darin, dass die Drohne auf dem Dach ihre Batterien aufladen kann. Somit werden zwei bestehende UAV-Probleme gleichzeitig gelöst - unzureichende Batterieleistung und kurze Reichweite.Das von kanadischen Ingenieuren entwickelte unbemannte Landesystem verwendet die GPS-Koordinaten eines Mobiltelefons, um nach einem Fahrzeug zu suchen, und erfordert während der Landung keine Koordination der Manöver zwischen dem UAV und dem Auto. Das heißt, der Fahrer benötigt überhaupt keine Unterstützung, außer für die Installation einer Landeplattform auf dem Dach mit einer visuellen Markierung und einem Mobiltelefon. Theoretisch bemerkt der Fahrer während der Fahrt möglicherweise nicht einmal, dass jemand sein Auto auf der Straße benutzt hat.Das Schlüsselelement bei der Landung der Drohne auf dem Dach des Autos sind die schwarzen und weißen visuellen Markierungen von AprilTag , die in letzter Zeit zunehmend in der Robotik eingesetzt werden. Solche Marker wurden 2011 von Olson entwickelt und spielen sowohl die Rolle der visuellen Identifizierung als auch der genauen 3D-Positionierung des Objekts relativ zur Kamera. Ein Marker von 30 × 30 cm wird verwendet, um die Drohne auszurichten und mit der Plattform in sechs Freiheitsgraden zu koordinieren. Als Zusatzinformation reicht eine ungefähre Schätzung der Koordinaten und der Geschwindigkeit des Fahrzeugs aus, die von den GPS- und IMU-Modulen (Inertial Measurement Unit) des Mobiltelefons stammt.Der Quadrocopter ist mit einem Trägheitsnavigationssystem (INS), einer dreiachsigen kardanischen Kamera (mit separater IMU) zur Verfolgung des Ziels sowie einer nach unten weisenden Weitwinkelkamera ausgestattet, die den AprilTag-Marker in den letzten Sekunden des Manövers aus nächster Nähe verfolgt. Die Entwickler stellen fest, dass das UAV in der Phase der Annäherung an das Fahrzeug auch den Geschwindigkeitssensor verwenden kann, der bei vielen modernen Quadrocoptern eingesetzt wird. Solche Sensoren berechnen die Geschwindigkeit aus einer Folge von Fotorahmen.
Ein Marker von 30 × 30 cm wird verwendet, um die Drohne auszurichten und mit der Plattform in sechs Freiheitsgraden zu koordinieren. Als Zusatzinformation reicht eine ungefähre Schätzung der Koordinaten und der Geschwindigkeit des Fahrzeugs aus, die von den GPS- und IMU-Modulen (Inertial Measurement Unit) des Mobiltelefons stammt.Der Quadrocopter ist mit einem Trägheitsnavigationssystem (INS), einer dreiachsigen kardanischen Kamera (mit separater IMU) zur Verfolgung des Ziels sowie einer nach unten weisenden Weitwinkelkamera ausgestattet, die den AprilTag-Marker in den letzten Sekunden des Manövers aus nächster Nähe verfolgt. Die Entwickler stellen fest, dass das UAV in der Phase der Annäherung an das Fahrzeug auch den Geschwindigkeitssensor verwenden kann, der bei vielen modernen Quadrocoptern eingesetzt wird. Solche Sensoren berechnen die Geschwindigkeit aus einer Folge von Fotorahmen. Schätzungen des relativen Standorts, der Geschwindigkeit und der Beschleunigung werden auf dem Bordcomputer mithilfe des Kalman-Filters berechnetbei einer Frequenz von 100 Hz. Dies ist ein effektiver rekursiver Filter, der den Zustandsvektor eines dynamischen Systems unter Verwendung einer Reihe unvollständiger und verrauschter Messungen auswertet.
Schätzungen des relativen Standorts, der Geschwindigkeit und der Beschleunigung werden auf dem Bordcomputer mithilfe des Kalman-Filters berechnetbei einer Frequenz von 100 Hz. Dies ist ein effektiver rekursiver Filter, der den Zustandsvektor eines dynamischen Systems unter Verwendung einer Reihe unvollständiger und verrauschter Messungen auswertet. Experimente haben gezeigt, dass der Multikopter mit einer Geschwindigkeit von bis zu 50 km / h erfolgreich auf Autos landet. Mit zunehmender Geschwindigkeit steigt das Risiko eines Abwürgens vom Rand der Plattform. Möglicherweise kann dieses Problem gelöst werden, indem die Verarbeitungsgeschwindigkeit von Informationen von Drohnenkameras erhöht wird.
Experimente haben gezeigt, dass der Multikopter mit einer Geschwindigkeit von bis zu 50 km / h erfolgreich auf Autos landet. Mit zunehmender Geschwindigkeit steigt das Risiko eines Abwürgens vom Rand der Plattform. Möglicherweise kann dieses Problem gelöst werden, indem die Verarbeitungsgeschwindigkeit von Informationen von Drohnenkameras erhöht wird.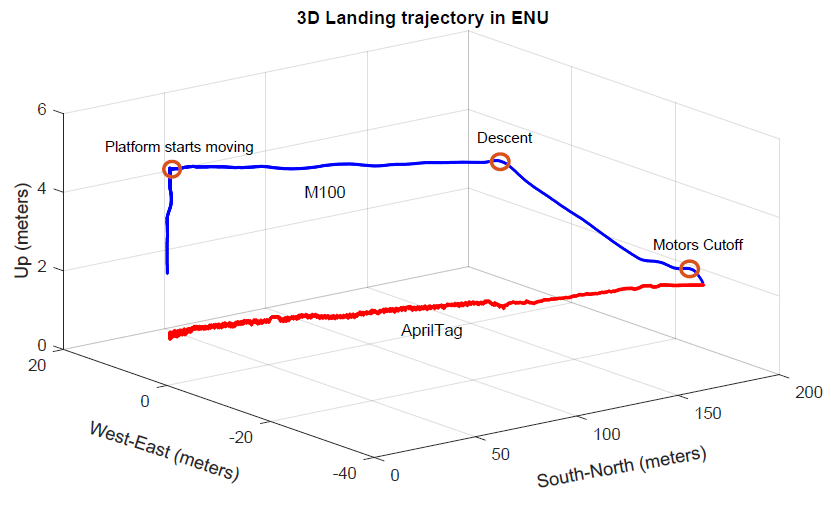 Die Flugbahn der Landung mit einer Geschwindigkeit von 50 km / hDer wissenschaftliche Artikel für den Weltkongress der vorbereitet IFAC im Jahr 2017 und veröffentlicht 22. November 2016 bei arXiv.org (arXiv: 1611,07329).
Die Flugbahn der Landung mit einer Geschwindigkeit von 50 km / hDer wissenschaftliche Artikel für den Weltkongress der vorbereitet IFAC im Jahr 2017 und veröffentlicht 22. November 2016 bei arXiv.org (arXiv: 1611,07329).Source: https://habr.com/ru/post/de399463/
All Articles