LIDAR von Mazda. Wir testen, ziehen Lada an
 Guten Tag.Diesmal habe ich um 2012 einen echten LIDAR vom Mazda CX5 bekommen. freigeben. In diesem Artikel beabsichtige ich, das Modul zu zerlegen und auf dem Tisch einzuschalten. Und das Lustige ist, ich werde diesen LIDAR in Datsun Mido (Lada Kalina in der Kindheit) installieren.
Guten Tag.Diesmal habe ich um 2012 einen echten LIDAR vom Mazda CX5 bekommen. freigeben. In diesem Artikel beabsichtige ich, das Modul zu zerlegen und auf dem Tisch einzuschalten. Und das Lustige ist, ich werde diesen LIDAR in Datsun Mido (Lada Kalina in der Kindheit) installieren.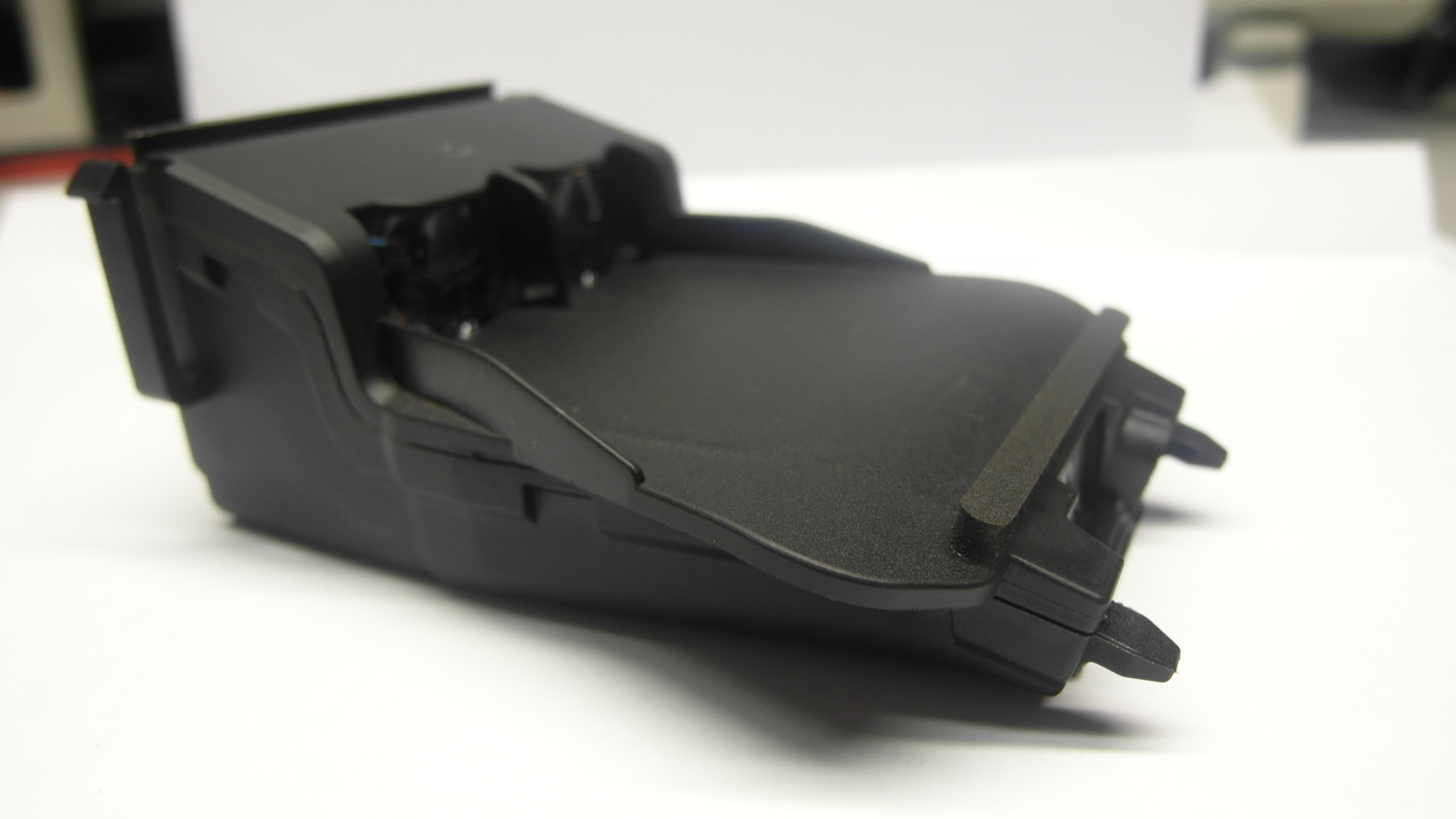
 Obwohl LIDAR auf dem Gerät geschrieben ist, ist es tatsächlich ein solches Laser-Auto-Roulette, das in der Lage ist, die Entfernung zu einem vorausliegenden Objekt zu messen. Hauptfunktion - Bietet automatische Bremsung bei gefährlicher Annäherung an ein anderes Fahrzeug oder beispielsweise eine Wand. Das Gerät ist eines der wichtigsten im Mazda ADAS-Komplex und wird von Continental hergestellt (sie stellen nicht nur Reifen aus Gummi her). Die ADAS-Option heißt CitySafety. Das automatische Bremssystem heißt Mazda-SCBS. Die Hinderniserkennungsreichweite beträgt 6 m, das System arbeitet mit einer Geschwindigkeit von bis zu 40 km / h. Laut Hersteller wird das System dazu beitragen, einen Unfall bei Geschwindigkeiten von bis zu 15 km / h zu verhindern und die Schwere des Unfalls bei Geschwindigkeiten von bis zu 30 km / h zu verringern.Beispiel für den Systembetrieb:Ich stelle fest, dass ich auf der Website des Herstellers (Link) eine recht detaillierte Dokumentation für das Modul gefunden habe. Aus der Dokumentation folgt, dass das Gerät nicht für eine bestimmte Automarke entwickelt wurde, sondern über eine ausreichend entwickelte interne Software verfügt, mit der Sie die Entfernung zum Objekt sowie die Geschwindigkeit dieses Objekts messen können.Hier ist ein Auszug aus der Dokumentation zu den wichtigsten Leistungsmerkmalen:Zweck des Geräts:
Obwohl LIDAR auf dem Gerät geschrieben ist, ist es tatsächlich ein solches Laser-Auto-Roulette, das in der Lage ist, die Entfernung zu einem vorausliegenden Objekt zu messen. Hauptfunktion - Bietet automatische Bremsung bei gefährlicher Annäherung an ein anderes Fahrzeug oder beispielsweise eine Wand. Das Gerät ist eines der wichtigsten im Mazda ADAS-Komplex und wird von Continental hergestellt (sie stellen nicht nur Reifen aus Gummi her). Die ADAS-Option heißt CitySafety. Das automatische Bremssystem heißt Mazda-SCBS. Die Hinderniserkennungsreichweite beträgt 6 m, das System arbeitet mit einer Geschwindigkeit von bis zu 40 km / h. Laut Hersteller wird das System dazu beitragen, einen Unfall bei Geschwindigkeiten von bis zu 15 km / h zu verhindern und die Schwere des Unfalls bei Geschwindigkeiten von bis zu 30 km / h zu verringern.Beispiel für den Systembetrieb:Ich stelle fest, dass ich auf der Website des Herstellers (Link) eine recht detaillierte Dokumentation für das Modul gefunden habe. Aus der Dokumentation folgt, dass das Gerät nicht für eine bestimmte Automarke entwickelt wurde, sondern über eine ausreichend entwickelte interne Software verfügt, mit der Sie die Entfernung zum Objekt sowie die Geschwindigkeit dieses Objekts messen können.Hier ist ein Auszug aus der Dokumentation zu den wichtigsten Leistungsmerkmalen:Zweck des Geräts:- Kollisionsvermeidungssensor
- Messen der Entfernung zu Objekten und Messen der Geschwindigkeit dieser Objekte in drei unabhängigen Kanälen. Bei Reichweiten bis zu 13,5 m
Das Gerät verfügt über ein internes System zur Überwachung des Zustands des IR-Lasers und der IR-Empfänger.Vom Sensorhersteller angegebene Spezifikationen:- Reichweite: 1,0-10 m. Erweiterte Reichweite bis zu 13,5 m
- Richtcharakteristik 27 horizontal und 11 vertikal
- Bereichsauflösung 1 mm
- Bereich der gemessenen Geschwindigkeiten 2-160 km / h
- Genauigkeit der Geschwindigkeitsmessung + -2 km \ h
- Messfrequenz 100 Hz
- Laserleistung 45 mW Laserklasse 1, 33 ns Blitzdauer
- Wellenlänge 905 nm
- Betriebszeit 12000 Stunden oder 15 Jahre
Der Sensor verfügt über drei Messkanäle, einen zentralen und zwei seitliche.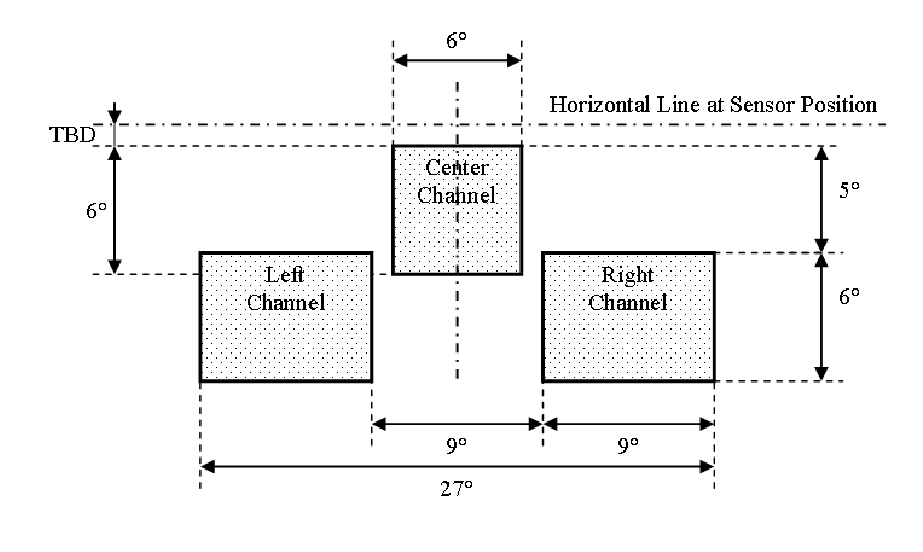

Wir fahren mit der Prüfung und Vorbereitung fort
Das Gerät ist recht kompakt, hat drei Glas "Augen". Zwei Linsen zum Empfangen reflektierter Strahlung und eine Fresnellinse zum Bilden der notwendigen Projektion des Laserstrahls. Zusammengebaut in einem Kunststoffgehäuse ohne Verwendung von Schrauben. Alles auf den Clips.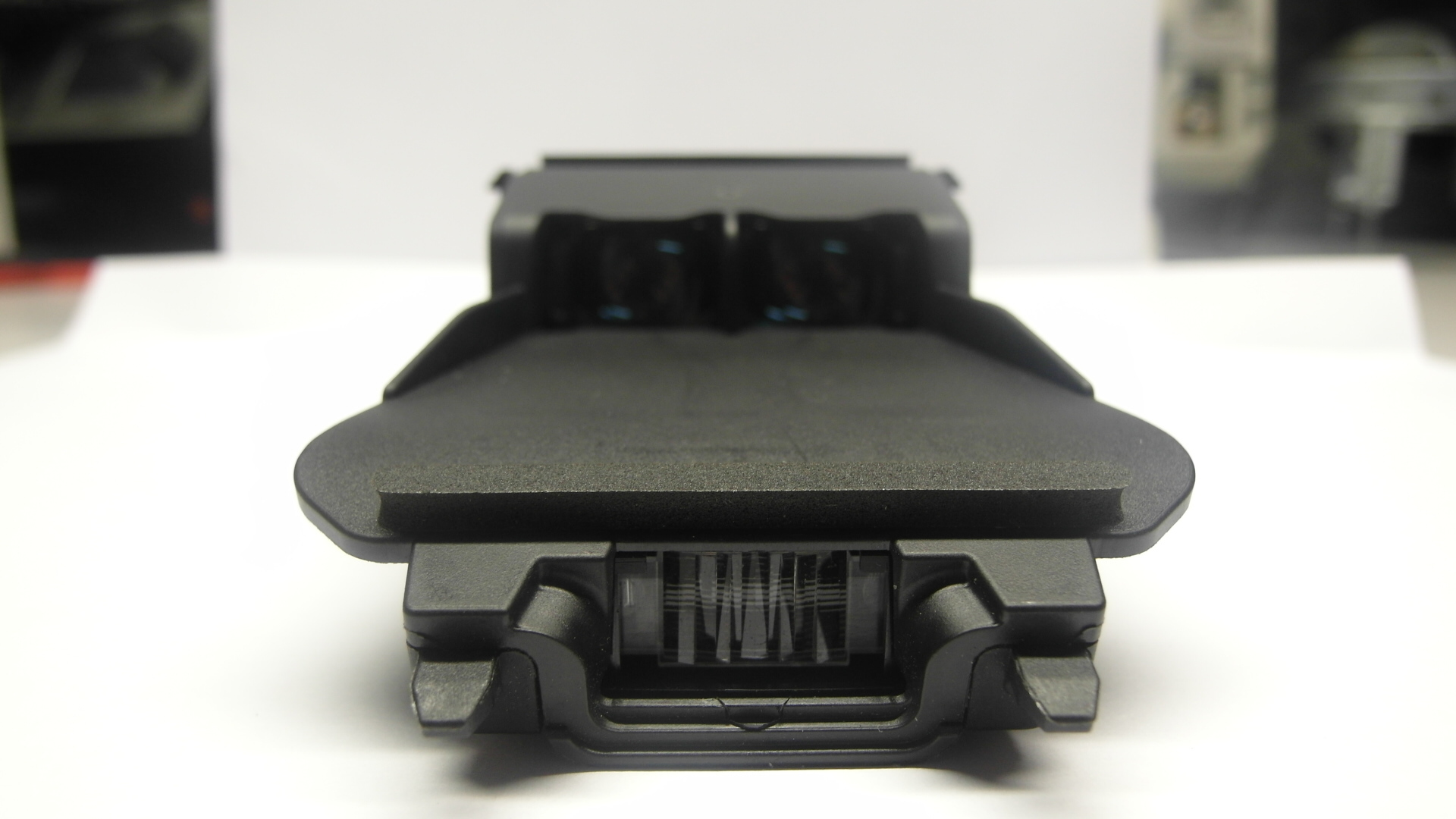
Innen von unten
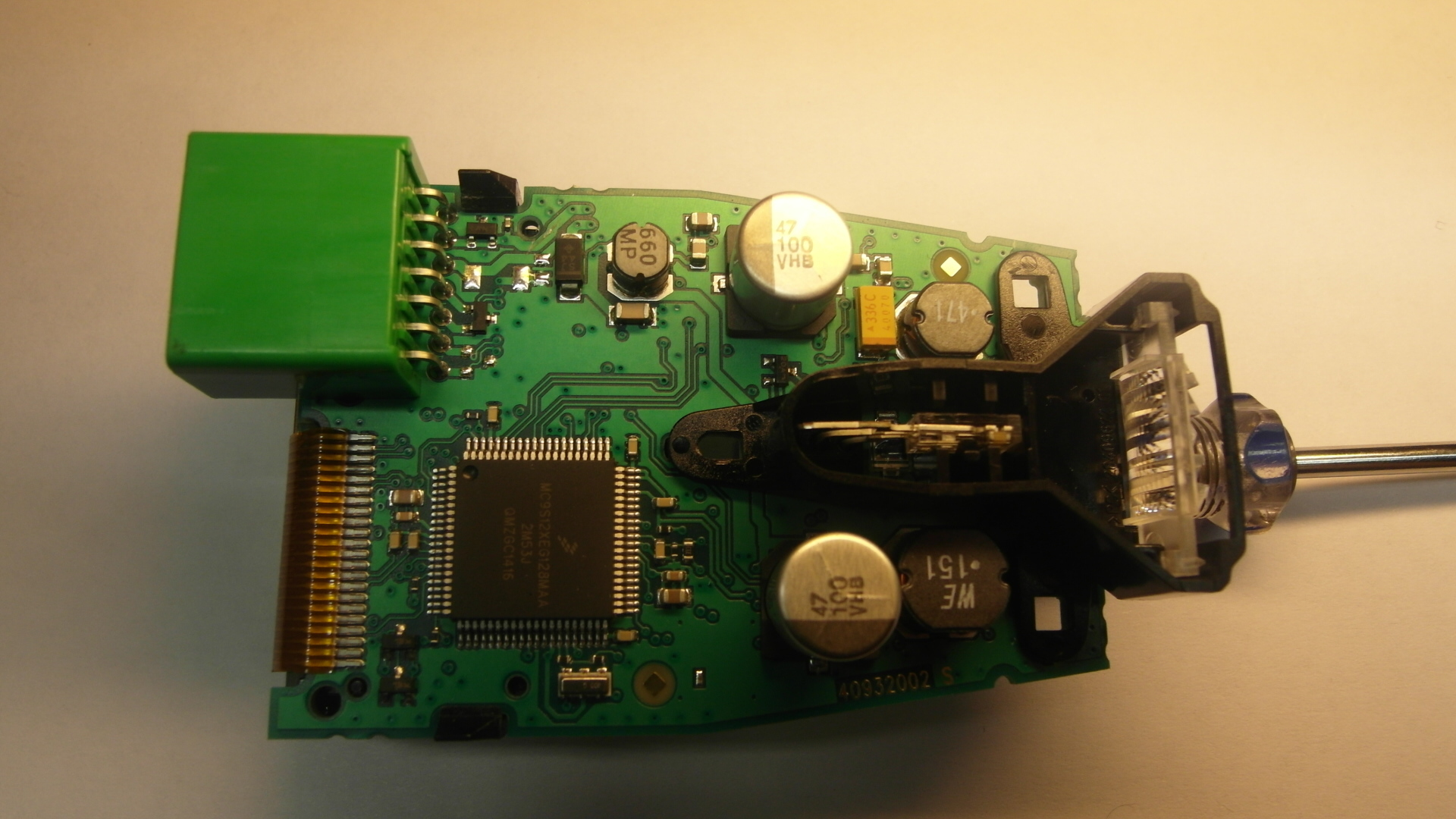 Hier ist ein emittierendes IR-Element - ganz anders als bei einem Laser. Unter dem Emitter befindet sich eine IR-Fotodiode, die das Vorhandensein von Strahlung steuert. Das System wird von einem 16-Bit-Mikrocontroller MC9S12XEG128 gesteuert, der auf Automobilanwendungen spezialisiert ist. Auf dieser Seite befinden sich auch die Elemente einer Schaltstromversorgung.
Hier ist ein emittierendes IR-Element - ganz anders als bei einem Laser. Unter dem Emitter befindet sich eine IR-Fotodiode, die das Vorhandensein von Strahlung steuert. Das System wird von einem 16-Bit-Mikrocontroller MC9S12XEG128 gesteuert, der auf Automobilanwendungen spezialisiert ist. Auf dieser Seite befinden sich auch die Elemente einer Schaltstromversorgung.Innen oben
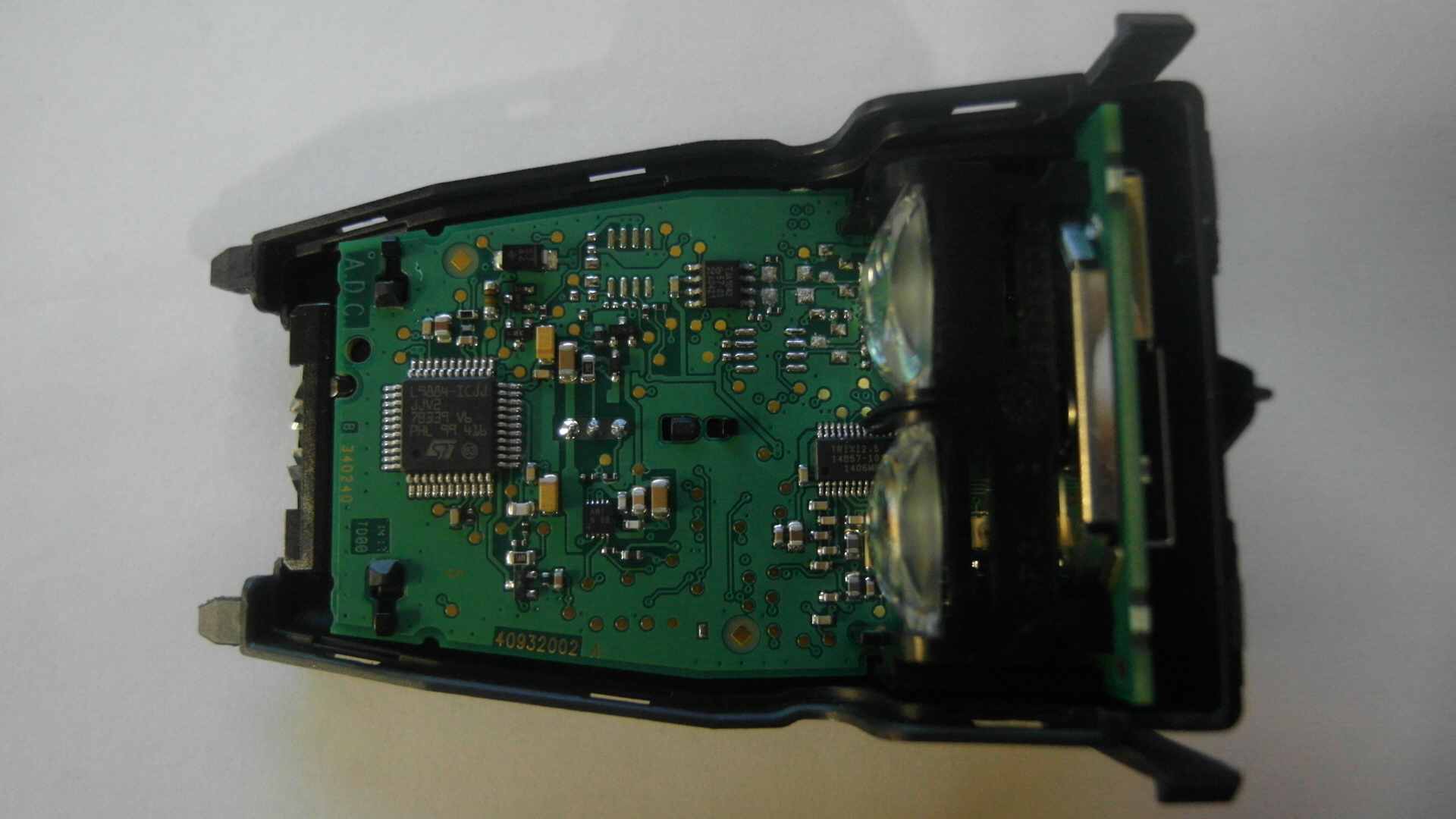 Hier sehen wir einen mysteriösen Chip von ST, der anscheinend die Funktionen eines Laser-Entfernungsmessers implementiert. CAN-Transceiver, ein leerer Raum für einen anderen CAN-Transceiver, zwei Empfängerlinsen und eine Platine mit IR-Fotozellen. Direkt unter den Linsen befinden sich zwei IR-LEDs, die zur Überprüfung der Funktionsfähigkeit des Empfängers dienen. Diese Elemente sind auf dem Foto mit entfernten Linsen sichtbar. Die Dokumentation für das Gerät besagt, dass die Messungen über drei unabhängige Kanäle durchgeführt werden. Wir können dies überprüfen, indem wir die drei Empfangselemente sehen.
Hier sehen wir einen mysteriösen Chip von ST, der anscheinend die Funktionen eines Laser-Entfernungsmessers implementiert. CAN-Transceiver, ein leerer Raum für einen anderen CAN-Transceiver, zwei Empfängerlinsen und eine Platine mit IR-Fotozellen. Direkt unter den Linsen befinden sich zwei IR-LEDs, die zur Überprüfung der Funktionsfähigkeit des Empfängers dienen. Diese Elemente sind auf dem Foto mit entfernten Linsen sichtbar. Die Dokumentation für das Gerät besagt, dass die Messungen über drei unabhängige Kanäle durchgeführt werden. Wir können dies überprüfen, indem wir die drei Empfangselemente sehen.
Verbindung auf dem Tisch
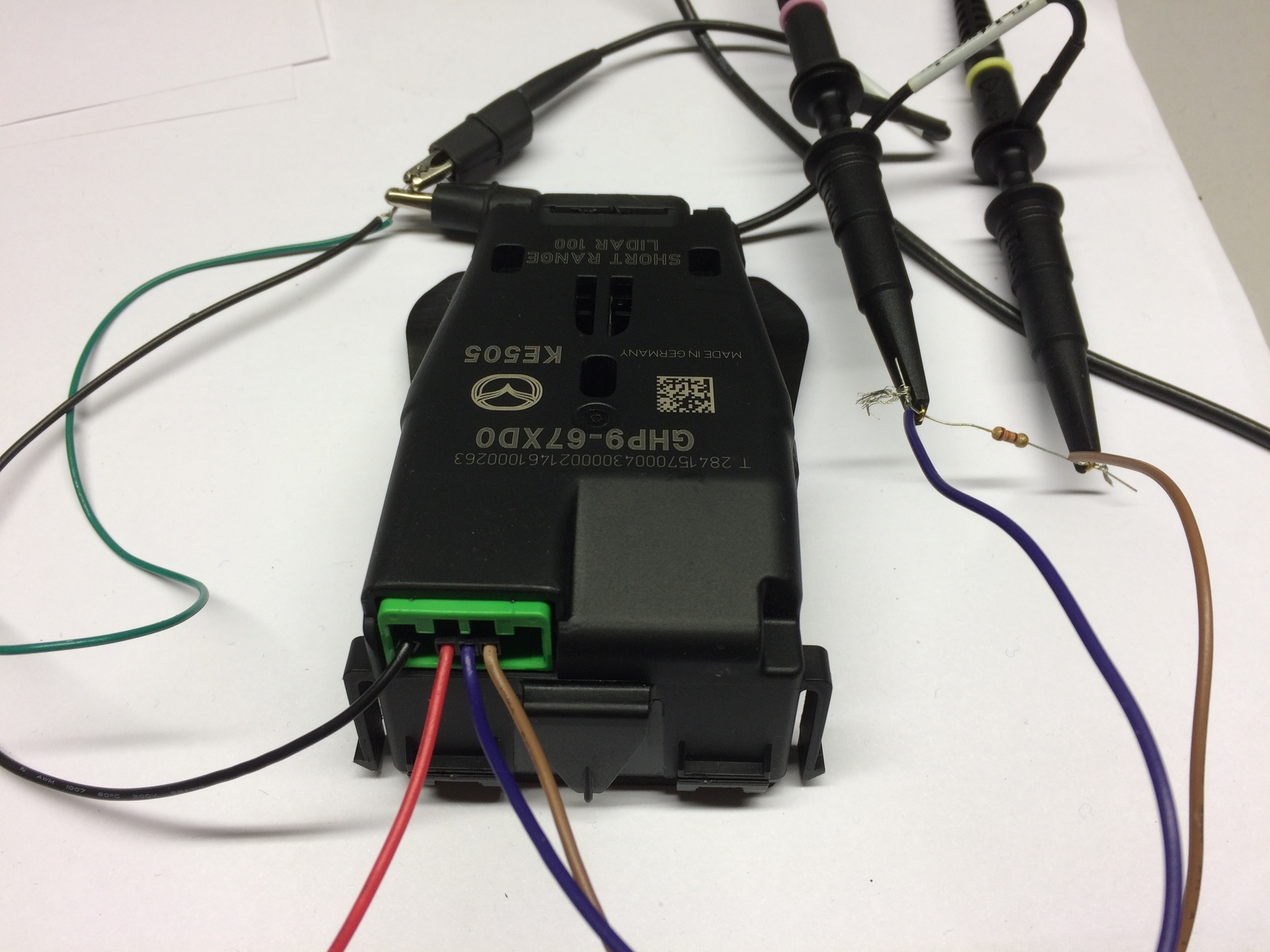
Vor dem Anschließen des Geräts gemäß Datenblatt habe ich die Pinbelegung des Steckers selbst festgelegt. Das Gerät erwies sich als einfach anzuschließen, es mussten nur 12V Strom und CAN-Bus gefunden werden. In der Dokumentation befand sich der CAN-Bus an anderen Pins, in meinem Fall wurden sie nicht verwendet und der leere Raum des Transceivers war nur für sie bestimmt. Die Übertragungsgeschwindigkeit in meinem CAN-Kanal beträgt –500 kbit, unbenutzt, gemessen an den Dokumenten - 1 Mbit.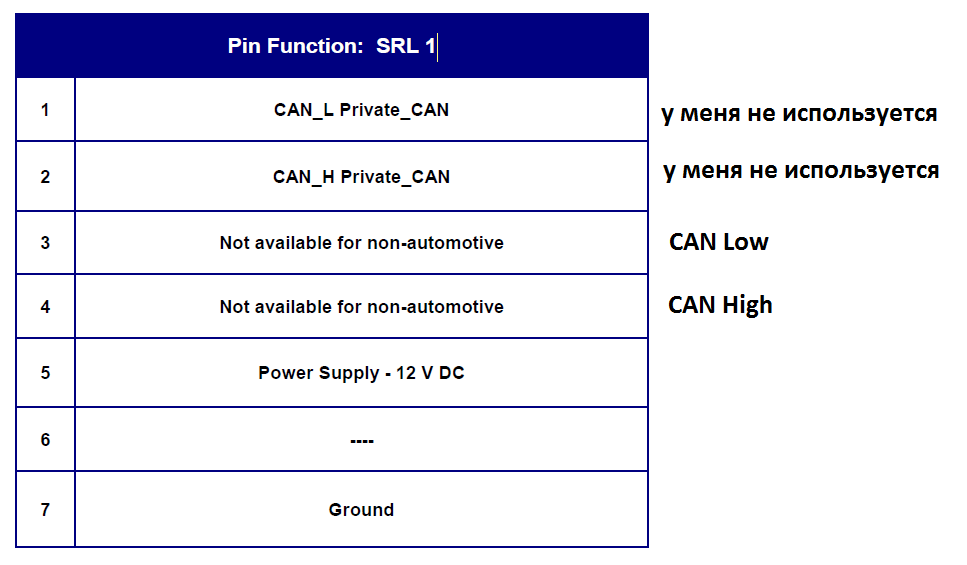 Ich habe das Gerät an eine typische Standardlaborquelle und den CAN-Bus an ein Tektronix-Oszilloskop mit einem CAN-Decoder angeschlossen. Unmittelbar nach dem Einschalten betrug der Stromverbrauch 90 mA, wobei etwa einmal pro Sekunde Spannungsspitzen von bis zu 130 mA auftraten. Er kam zu dem Schluss, dass der Lidar den Laser einzuschalten begann. Der CAN-Bus wurde ebenfalls sofort zum Leben erweckt, es gab ein einziges Paket, das das Oszilloskop leicht erkannte.
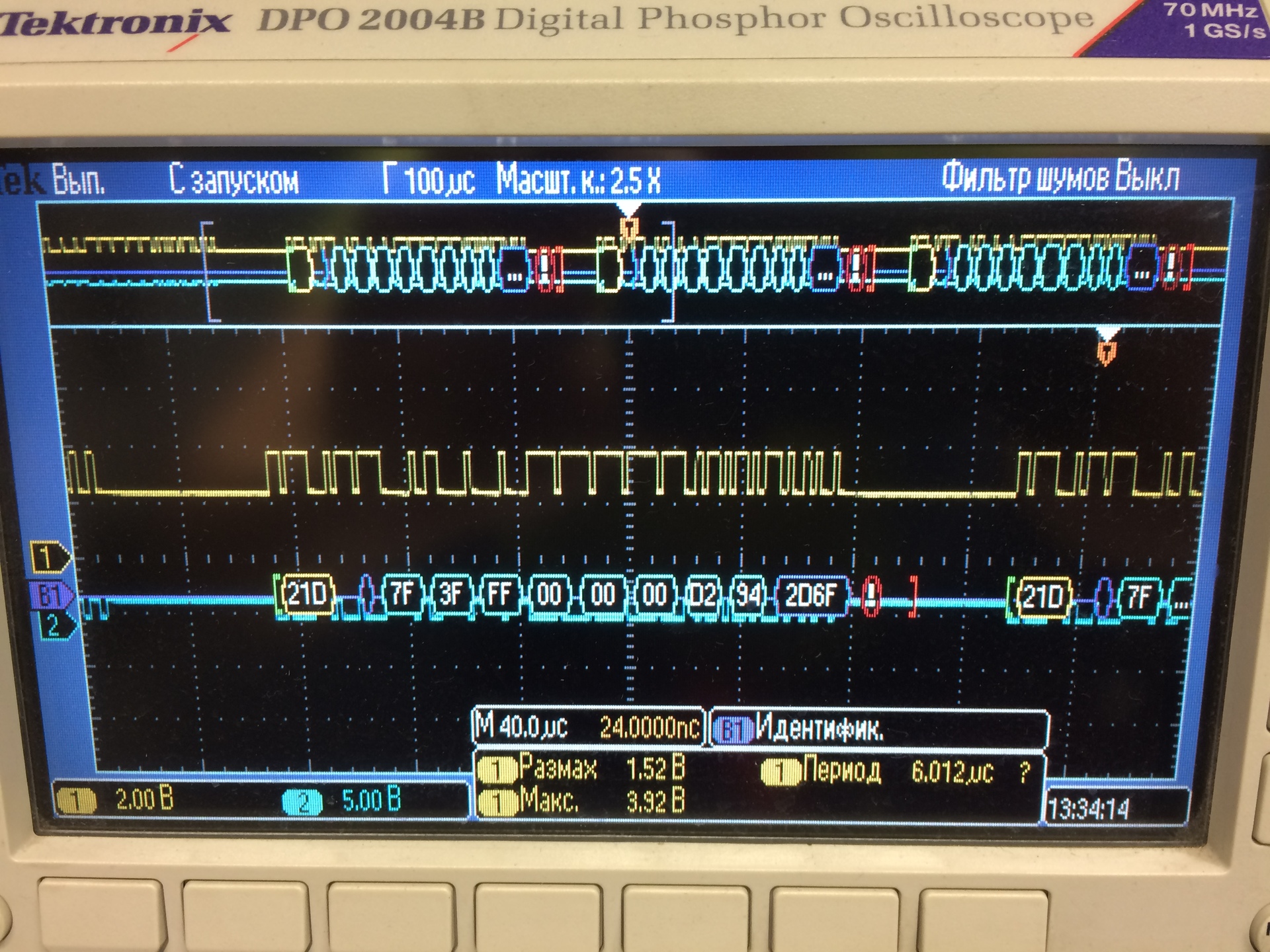
Ich habe das Gerät an eine typische Standardlaborquelle und den CAN-Bus an ein Tektronix-Oszilloskop mit einem CAN-Decoder angeschlossen. Unmittelbar nach dem Einschalten betrug der Stromverbrauch 90 mA, wobei etwa einmal pro Sekunde Spannungsspitzen von bis zu 130 mA auftraten. Er kam zu dem Schluss, dass der Lidar den Laser einzuschalten begann. Der CAN-Bus wurde ebenfalls sofort zum Leben erweckt, es gab ein einziges Paket, das das Oszilloskop leicht erkannte.ID: 0x21D
DLC 8 byte
DATA: 0x7F 0x3F 0xFF 0x00 0x00 0x00 0xD2 0x94
.
Installieren Sie "Lidar" in Ihrem Auto, begann ich in Analogie zum Mazda. Kleben Sie es einfach auf ein doppelseitiges Klebeband an der Windschutzscheibe im Bereich des Rückspiegels. Er versorgte den Zigarettenanzünder mit Strom.Ich habe mich mit einem Adapter, der vor 10 Jahren von mir hergestellt wurde und mit dem bekannten CAN-Hacker-Programm kompatibel ist, mit CAN verbunden. Im Gegensatz zur ersten Aufnahme in die Tabelle begann sich das erste Byte des Pakets sofort aktiv zu ändern, bis der Lidar in der Lobby fixiert war. Basierend auf dem, was ich festgestellt habe, dass dieses Byte für die gemessene Entfernung verantwortlich ist.
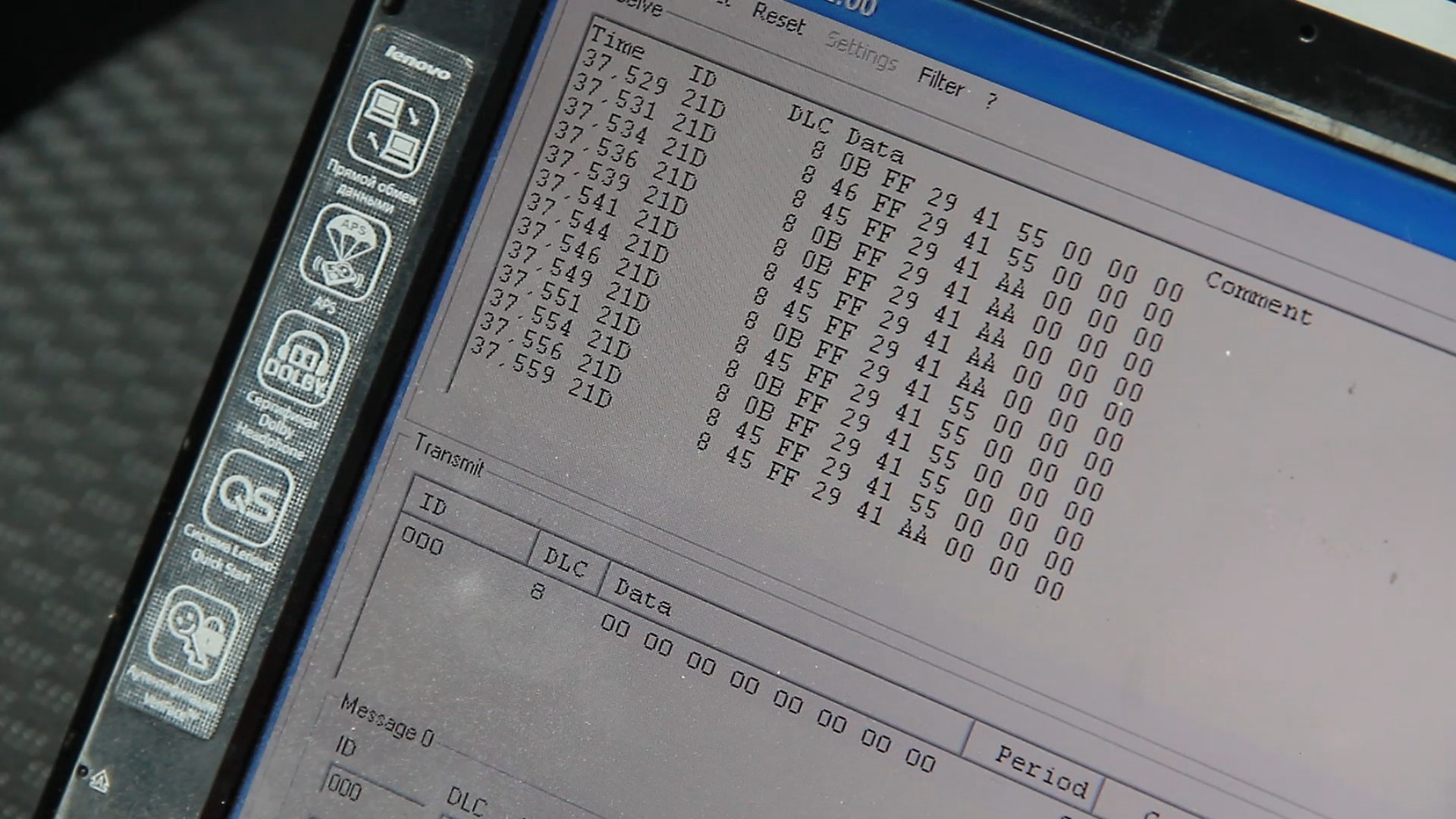 Das Handbuch zum Lidar-Kommunikationsprotokoll mit der Außenwelt beschreibt viele übertragene Parameter. In unserem Fall ist es uns gelungen, nur den Abstand zur Vorderseite des Objekts zu messen.
Das Handbuch zum Lidar-Kommunikationsprotokoll mit der Außenwelt beschreibt viele übertragene Parameter. In unserem Fall ist es uns gelungen, nur den Abstand zur Vorderseite des Objekts zu messen.Testen
Zum Testen wurde das Auto eines Freundes als Ziel ausgewählt. Der Test war wie folgt:- Wir kommen dem Ziel so nahe wie möglich, wir fixieren das erste Byte des Pakets
- Wir messen den Abstand zum Ziel mit einem Laserbandmaß
- Wir vergleichen die Roulette-Daten mit den vom Lidar übertragenen Daten.
Entsprechung des Wertes des ersten Bytes des LIDAR-Pakets und des durch das Laserbandmaß gemessenen Wertes:0x41 = 2,054 m
0x46 = 3,166 m
0x49 = 3,8 m
0x7F - das Ziel ist verloren
Es stellte sich heraus, dass der Lidar die Entfernung zum Ziel nicht mehr als 4 Meter sicher misst. Meiner Meinung nach ist dies nicht das beste Ergebnis für einen Notbremssystemsensor. Möglicherweise hat das Gerät in einem vereinfachten oder Testmodus gearbeitet, und bei einem Auto misst das Gerät die Entfernung in einem größeren Bereich. Wir haben auch ein Experiment mit einer großen glänzenden weißen Tafel durchgeführt. In diesem Fall wurde die Entfernung bis zu 5 Metern gemessen.Zusammenfassung
Der von Continental hergestellte Mazda Short Range LIDAR ist ein interessantes Gerät. Ich möchte, dass der Entfernungsmessbereich über die 4-Meter-Gänge hinausgeht. Wenn sich eine Gelegenheit ergibt, werde ich versuchen, sie in dem in der Dokumentation beschriebenen Modus zu konfigurieren, damit Sie große Entfernungen und Geschwindigkeiten von Objekten messen können. Möglicherweise kann der zweite CAN-Kanal wiederbelebt werden. Wenn es plötzlich jemanden gibt, der in Nowosibirsk ein Gerät graben möchte, werde ich gerne zusammenarbeiten.Ich füge hinzu, dass das Gerät beim Parsen zu einem Preis von 3.000 bis 6.000 Rubel ziemlich leicht zu finden ist.Katalognummer: GHP9-67XD0Und schließlich ein Film über ein Gerät, das nach besten Kräften gedreht wurde.Links:→ Continental, Dokumentation→ MAZDA→ User StorySource: https://habr.com/ru/post/de399621/
All Articles