Wie wir uns auf die UAV Challenge 2016 vorbereitet haben
 Das Murena Quad-Flugzeug während derUAV Challenge -Testflüge ist eine jährliche Veranstaltung zur Erweiterung der UAV- Fähigkeitenund in Kombination einer der ehrgeizigsten Roboterwettbewerbe der Welt. Die Auswirkungen der Veranstaltung auf die Branche sind recht groß: Im Jahr 2014 nahmen beispielsweise die regelmäßigen Mitarbeiter von so beliebten Projekten wie Ardupilot, PX4 und Paparazzi an der UAV Challenge teil, sodass viele der Merkmale dieser heute existierenden Flugsteuerungen genau unter dem Einfluss der Anforderungen dieser Wettbewerbe entstanden sind. Alle zwei Jahre steht der Wettbewerb Teams aus aller Welt offen, und gleichzeitig wird die Mission, eine Person zu retten, zum Thema. In diesem Jahr haben wir es auch geschafft, in die Liste der zehn Teams einzusteigen, die die drei Vorrunden der UAV Challenge bestanden haben, und sind zu den Veranstaltungen des letzten Teils gegangen, der vom 27. bis 29. September in Dalby, Australien, stattfand. Die Herausforderung endete vor zwei Monaten - seitdem haben sich unsere Eindrücke beruhigt,Wir haben die Erfahrung analysiert und sind nun bereit, die beiden Flugzeuge zu beschreiben, mit denen wir zur Veranstaltung gekommen sind.Wir sind MelAvio Avionics Club, eine Vereinigung von Studenten der Technischen Universität Warschau. Wir beschäftigen uns mit Programmierung, Elektronik und Mechanik als Teil ihrer Anwendung auf Drohnen, und fast alle unsere Arbeiten fließen in die Vorbereitung verschiedener Wettbewerbe, von denen der wichtigste kürzlich die UAV-Herausforderung war. In diesem Jahr nahm MelAvio zum zweiten Mal an der Herausforderung teil: Vor zwei Jahren hatte unser Team bereits das Finale in Australien erreicht. Dann haben wir es geschafft, uns mit dem ursprünglichen mechanischen Design und einem selbstgebauten Flugregler gut zu zeigen, den zehnten Platz in der Gesamtwertung einzunehmen und eine Auszeichnung für Flugkünste zu erhalten, obwohl wir die Mission des Wettbewerbs nicht vollständig erfüllen.
Das Murena Quad-Flugzeug während derUAV Challenge -Testflüge ist eine jährliche Veranstaltung zur Erweiterung der UAV- Fähigkeitenund in Kombination einer der ehrgeizigsten Roboterwettbewerbe der Welt. Die Auswirkungen der Veranstaltung auf die Branche sind recht groß: Im Jahr 2014 nahmen beispielsweise die regelmäßigen Mitarbeiter von so beliebten Projekten wie Ardupilot, PX4 und Paparazzi an der UAV Challenge teil, sodass viele der Merkmale dieser heute existierenden Flugsteuerungen genau unter dem Einfluss der Anforderungen dieser Wettbewerbe entstanden sind. Alle zwei Jahre steht der Wettbewerb Teams aus aller Welt offen, und gleichzeitig wird die Mission, eine Person zu retten, zum Thema. In diesem Jahr haben wir es auch geschafft, in die Liste der zehn Teams einzusteigen, die die drei Vorrunden der UAV Challenge bestanden haben, und sind zu den Veranstaltungen des letzten Teils gegangen, der vom 27. bis 29. September in Dalby, Australien, stattfand. Die Herausforderung endete vor zwei Monaten - seitdem haben sich unsere Eindrücke beruhigt,Wir haben die Erfahrung analysiert und sind nun bereit, die beiden Flugzeuge zu beschreiben, mit denen wir zur Veranstaltung gekommen sind.Wir sind MelAvio Avionics Club, eine Vereinigung von Studenten der Technischen Universität Warschau. Wir beschäftigen uns mit Programmierung, Elektronik und Mechanik als Teil ihrer Anwendung auf Drohnen, und fast alle unsere Arbeiten fließen in die Vorbereitung verschiedener Wettbewerbe, von denen der wichtigste kürzlich die UAV-Herausforderung war. In diesem Jahr nahm MelAvio zum zweiten Mal an der Herausforderung teil: Vor zwei Jahren hatte unser Team bereits das Finale in Australien erreicht. Dann haben wir es geschafft, uns mit dem ursprünglichen mechanischen Design und einem selbstgebauten Flugregler gut zu zeigen, den zehnten Platz in der Gesamtwertung einzunehmen und eine Auszeichnung für Flugkünste zu erhalten, obwohl wir die Mission des Wettbewerbs nicht vollständig erfüllen. Barracuda, MelAvio-Drohne, bei der UAV Challenge Outback Rescue 2014 Indiesem Jahr haben wir den Ansatz zur Teilnahme ein wenig geändert und einen vorgefertigten Flugregler (Ardupilot auf Pixhawk) verwendet, um ihn an unsere Bedürfnisse anzupassen. Dies liegt an der Tatsache, dass die Bedingungen der Herausforderung im Vergleich zum letzten Mal komplizierter geworden sind und die unabhängige Entwicklung einer Lösung, die alle Bedingungen erfüllt, eine zu ehrgeizige Aufgabe ist. Es war logischer, vorhandene Open-Source-Projekte zu verwenden.
Barracuda, MelAvio-Drohne, bei der UAV Challenge Outback Rescue 2014 Indiesem Jahr haben wir den Ansatz zur Teilnahme ein wenig geändert und einen vorgefertigten Flugregler (Ardupilot auf Pixhawk) verwendet, um ihn an unsere Bedürfnisse anzupassen. Dies liegt an der Tatsache, dass die Bedingungen der Herausforderung im Vergleich zum letzten Mal komplizierter geworden sind und die unabhängige Entwicklung einer Lösung, die alle Bedingungen erfüllt, eine zu ehrgeizige Aufgabe ist. Es war logischer, vorhandene Open-Source-Projekte zu verwenden.Herausforderung Herausforderung
Um den Umfang der Aufgabe zu verdeutlichen, ist es sinnvoll, die für den Wettbewerb vorgestellte Mission kurz zu beschreiben. Die Aufgabe der Teams war es, eine Blutprobe von Joe zu liefern, einem Bewohner des ländlichen Raums, der sich der Legende nach plötzlich schlecht fühlte, in seinem Haus außerhalb der Stadt zu finden. Joes Haus ist durch Überschwemmungen von der Stadt abgeschnitten. Um es zu erreichen und zurückzufliegen, muss das Flugzeug auf einem indirekten Weg bis zu einundfünfzig Kilometer Luftraum vollständig überwinden. Darüber hinaus ist die Position von Joe nur mit einer Genauigkeit von hundert Metern bekannt. Um Land zu schließen und eine Verletzung der Person zu vermeiden, muss das Flugzeug es genauer lokalisieren, wenn es bereits vorhanden ist. Erschwerend kommt hinzu, dass es zu Beginn der Mission und in der Nähe von Joe kaum Garantien für die Landschaft gibt.so dass die Drohne die Fähigkeit haben muss, vertikal oder vertikal zu starten oder zu landen, sowie ein System, das es mit einem ausreichenden Maß an Zuverlässigkeit ermöglicht, einen geeigneten Landeplatz auszuwählen. Die Organisatoren der Herausforderung fördern das autonome Verhalten der Drohne so weit wie möglich. Der bestmögliche Ansatz besteht darin, die Aktionen des Piloten von den Missionen vollständig zu eliminieren, vom Abflug vom Startort bis zur Landung mit einer Blutprobe am selben Ort. Zusätzlich zur Hauptdrohne „Lieferung“ kann ein Hilfsflugzeug an der Mission teilnehmen. Beide Geräte haben eine Vielzahl von Anforderungen, um einen sicheren Flug und ein korrektes Verhalten in unvorhergesehenen Situationen zu gewährleisten.sowie ein System, das es mit einem ausreichenden Maß an Zuverlässigkeit ermöglicht, einen geeigneten Landeplatz auszuwählen. Die Organisatoren der Herausforderung fördern das autonome Verhalten der Drohne so weit wie möglich. Der bestmögliche Ansatz besteht darin, die Aktionen des Piloten von den Missionen vollständig zu eliminieren, vom Abflug vom Startort bis zur Landung mit einer Blutprobe am selben Ort. Zusätzlich zur Hauptdrohne „Lieferung“ kann ein Hilfsflugzeug an der Mission teilnehmen. Beide Geräte haben eine Vielzahl von Anforderungen, um einen sicheren Flug und ein korrektes Verhalten in unvorhergesehenen Situationen zu gewährleisten.sowie ein System, das es mit einem ausreichenden Maß an Zuverlässigkeit ermöglicht, einen geeigneten Landeplatz auszuwählen. Die Organisatoren der Herausforderung fördern das autonome Verhalten der Drohne so weit wie möglich. Der bestmögliche Ansatz besteht darin, die Aktionen des Piloten von den Missionen vollständig zu eliminieren, vom Abflug vom Startort bis zur Landung mit einer Blutprobe am selben Ort. Zusätzlich zur Hauptdrohne „Lieferung“ kann ein Hilfsflugzeug an der Mission teilnehmen. Beide Geräte haben eine Vielzahl von Anforderungen, um einen sicheren Flug und ein korrektes Verhalten in unvorhergesehenen Situationen zu gewährleisten.Der bestmögliche Ansatz besteht daher darin, die Aktionen des Piloten von Missionen vollständig zu eliminieren, vom Abflug vom Startort bis zur Landung mit einer Blutprobe am selben Ort. Zusätzlich zur Hauptdrohne „Lieferung“ kann ein Hilfsflugzeug an der Mission teilnehmen. Beide Geräte haben eine Vielzahl von Anforderungen, um einen sicheren Flug und ein korrektes Verhalten in unvorhergesehenen Situationen zu gewährleisten.Der bestmögliche Ansatz besteht daher darin, die Aktionen des Piloten von Missionen vollständig zu eliminieren, vom Abflug vom Startort bis zur Landung mit einer Blutprobe am selben Ort. Zusätzlich zur Hauptdrohne „Lieferung“ kann ein Hilfsflugzeug an der Mission teilnehmen. Beide Geräte haben eine Vielzahl von Anforderungen, um einen sicheren Flug und ein korrektes Verhalten in unvorhergesehenen Situationen zu gewährleisten.Beide Geräte haben eine Vielzahl von Anforderungen, um einen sicheren Flug und ein korrektes Verhalten in unvorhergesehenen Situationen zu gewährleisten.Beide Geräte haben eine Vielzahl von Anforderungen, um einen sicheren Flug und ein korrektes Verhalten in unvorhergesehenen Situationen zu gewährleisten. ,Als Hauptdrohne für die Mission haben wir uns für ein Quad-Flugzeug entschieden - eine Kombination aus einem Quadrocopter und einem klassischen Layout-Flugzeug. Die Notwendigkeit eines vertikalen Starts und einer vertikalen Landung hat unsere Aufmerksamkeit sofort von den Standard-Starrflügelschemata genommen, sodass die Hauptalternativen zu der gewählten Option ein Tiltrotor und ein Hubschrauber waren. Die Version mit einem Cabrio-Flugzeug wurde abgelehnt, da die Cabrio-Motoren mit einer festen Steigung des Propellers zu einem geringen Wirkungsgrad verurteilt sind, was für uns aufgrund der angenommenen erforderlichen Reichweite nicht akzeptabel war. Der Bau eines Tiltrotors mit einer Stütze mit variabler Steigung implizierte ein gewisses Maß an mechanischer Komplexität, mit dem wir als studentische wissenschaftliche Organisation aufgrund begrenzter Ressourcen nicht umgehen konnten.Für die Hubschrauberoption erwarteten wir ebenfalls Schwierigkeiten mit der Mechanik, aber sie sah nicht zu deprimierend aus, und wir lehnten diese Option weitgehend ab, da die Quad-Ebene wie eine originellere und interessantere Plattform aussah.
,Als Hauptdrohne für die Mission haben wir uns für ein Quad-Flugzeug entschieden - eine Kombination aus einem Quadrocopter und einem klassischen Layout-Flugzeug. Die Notwendigkeit eines vertikalen Starts und einer vertikalen Landung hat unsere Aufmerksamkeit sofort von den Standard-Starrflügelschemata genommen, sodass die Hauptalternativen zu der gewählten Option ein Tiltrotor und ein Hubschrauber waren. Die Version mit einem Cabrio-Flugzeug wurde abgelehnt, da die Cabrio-Motoren mit einer festen Steigung des Propellers zu einem geringen Wirkungsgrad verurteilt sind, was für uns aufgrund der angenommenen erforderlichen Reichweite nicht akzeptabel war. Der Bau eines Tiltrotors mit einer Stütze mit variabler Steigung implizierte ein gewisses Maß an mechanischer Komplexität, mit dem wir als studentische wissenschaftliche Organisation aufgrund begrenzter Ressourcen nicht umgehen konnten.Für die Hubschrauberoption erwarteten wir ebenfalls Schwierigkeiten mit der Mechanik, aber sie sah nicht zu deprimierend aus, und wir lehnten diese Option weitgehend ab, da die Quad-Ebene wie eine originellere und interessantere Plattform aussah.Bau
Bevor wir das „ernsthafte“ Modell der Quad-Ebene entwerfen, haben wir ein Testmodell zusammengestellt - einen Apparat, den wir „Freak“ genannt haben. Dieser Hybrid wurde auf der Grundlage eines vorgefertigten, gekauften Modellflugzeugs hergestellt und wurde entwickelt, um die Funktionsfähigkeit der Idee eines Quad-Flugzeugs sowie alle Innovationen, die wir an der Flugsteuerung anpassen, zu testen. Nachdem wir sichergestellt hatten, dass wir mit einer solchen Drohnenkonfiguration wirklich fliegen können, begannen wir mit der Entwicklung eines größeren Modells. TestflugzeugVon Beginn der Entwicklung an war klar, dass die Hubschrauberpropeller und -motoren im Flugzeugmodus zusätzlichen Widerstand und Ungleichgewicht erzeugen würden. Deshalb haben wir uns entschlossen, das Design des Flugzeugs selbst so „bremsend“ wie möglich und so stabil wie möglich zu gestalten. Darüber hinaus bestand unsere ursprüngliche Anforderung darin, den maximalen Platz im Flugzeugkörper zu erhalten, damit Computer-Vision-System-Geräte und Lithium-Polymer-Batterien mit einer Kapazität für eine gesamte Mission (das Flugzeug ist vollständig elektrisch) untergebracht werden können. Basierend auf diesen Überlegungen haben wir eine Hochflügelebene mit einem Trapezflügel mittlerer Dehnung und einem T-Schwanz gewählt. Der Winkel des V-Querflügels wurde gleich anderthalb Grad gewählt.Mit den angegebenen Anfangsdaten zum Design und der Annahme der Masse des Flugzeugs haben wir mit der Entwicklung begonnen. Zunächst wurde mit Hilfe der Profili 2.0-Anwendung eine geeignete Profiloption für den Hauptflügel des Flugzeugs ausgewählt. Anschließend haben wir in XFLR5 die Form des Flügels und des Gefieders im Volumen festgelegt. Darüber hinaus haben wir bei ANSYS Fluent überprüft, dass die in unmittelbarer Nähe des Flügels befindlichen Hubschraubermotoren und Propeller die Art des Luftstroms auf dem Flügel nicht kritisch verändern. Um diese Verfahren durchzuführen, haben wir eine detailliertere Untersuchung der gesamten Struktur in SOLIDWORKS durchgeführt.
TestflugzeugVon Beginn der Entwicklung an war klar, dass die Hubschrauberpropeller und -motoren im Flugzeugmodus zusätzlichen Widerstand und Ungleichgewicht erzeugen würden. Deshalb haben wir uns entschlossen, das Design des Flugzeugs selbst so „bremsend“ wie möglich und so stabil wie möglich zu gestalten. Darüber hinaus bestand unsere ursprüngliche Anforderung darin, den maximalen Platz im Flugzeugkörper zu erhalten, damit Computer-Vision-System-Geräte und Lithium-Polymer-Batterien mit einer Kapazität für eine gesamte Mission (das Flugzeug ist vollständig elektrisch) untergebracht werden können. Basierend auf diesen Überlegungen haben wir eine Hochflügelebene mit einem Trapezflügel mittlerer Dehnung und einem T-Schwanz gewählt. Der Winkel des V-Querflügels wurde gleich anderthalb Grad gewählt.Mit den angegebenen Anfangsdaten zum Design und der Annahme der Masse des Flugzeugs haben wir mit der Entwicklung begonnen. Zunächst wurde mit Hilfe der Profili 2.0-Anwendung eine geeignete Profiloption für den Hauptflügel des Flugzeugs ausgewählt. Anschließend haben wir in XFLR5 die Form des Flügels und des Gefieders im Volumen festgelegt. Darüber hinaus haben wir bei ANSYS Fluent überprüft, dass die in unmittelbarer Nähe des Flügels befindlichen Hubschraubermotoren und Propeller die Art des Luftstroms auf dem Flügel nicht kritisch verändern. Um diese Verfahren durchzuführen, haben wir eine detailliertere Untersuchung der gesamten Struktur in SOLIDWORKS durchgeführt.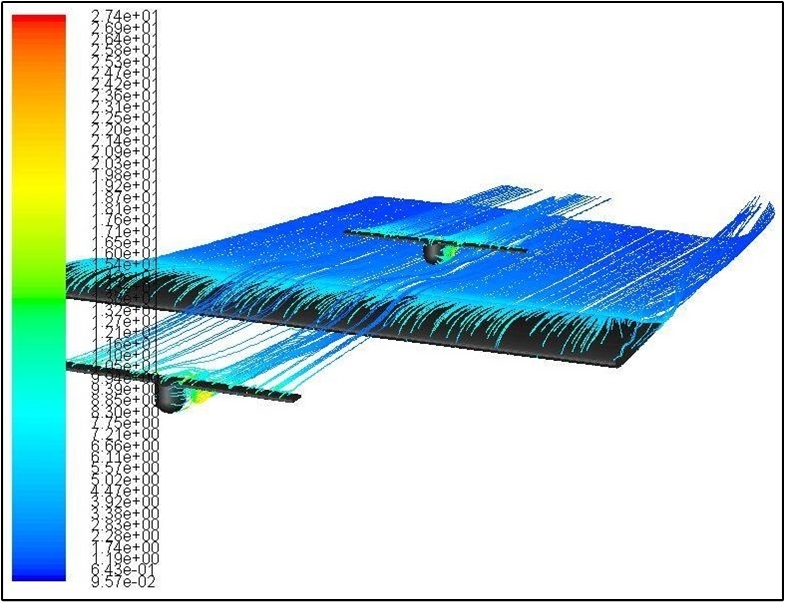 Flugzeugpropeller-Durchflusstest in ANSYS FluentBei der Arbeit an der Struktur musste besonderes Augenmerk auf die Karosserie und den Flügel des Flugzeugs gelegt werden, da diese die maximale Anzahl von Teilen aufweisen und den größten Einfluss auf die Tragfähigkeit und Dynamik des Flugzeugs haben. Ein besonderer Ansatz für diese Elemente war nicht nur während der Entwicklung, sondern auch während der Montage erforderlich, da sie unter Beibehaltung ihrer ausreichenden Festigkeit so leicht wie möglich gemacht werden mussten.Der Flügel des Flugzeugs bestand aus drei Komponenten: dem Mittelteil und der rechten und linken Konsole. Die Basis für die Konstruktion des Flügels war extrudierter Polystyrolschaum. Teile des Flügels wurden so konstruiert, dass ihre Oberfläche gerade war, und dank dieser konnte eine CNC-Drahtmaschine zum präzisen Schneiden von Polyester verwendet werden. Danach wurde der vorgefertigte Polyester einer zusätzlichen Verarbeitung unterzogen, um seine Festigkeit zu erhöhen und die aerodynamische Leistung zu verbessern. So wurde der Mittelteilrohling mit Kohlefaser und Polyesterharz laminiert; Um das Werkstück glatt und gleichmäßig zu halten, wurde es für die Dauer der Laminierung mit Plexiglas umwickelt, in einen Vakuumbeutel gegeben und in einem Polystyrolschaum-Negativ fixiert.Es war nicht möglich, Kohlefaser für die Herstellung von Flügelkonsolen zu verwenden, auch aus dem Grund, dass Funkübertragungsgeräte in diesen Teilen angebracht werden mussten (Kohle erzeugt Interferenzen), weshalb die Konsolen mit einer Glasfaserschicht und einer Balsaschicht laminiert wurden. An den Kanten der Elemente wurden Befestigungen für ihre Montage zu einer einzigen Flügelstruktur vorgenommen. Außerdem wurde im Flügel ein Platz für die Platzierung eines Funk-Transceivers, von Antrieben für Querruder, Drähte und anderer Ausrüstung ausgeschnitten. An den erforderlichen Stellen wurden Ausschnitte, die auf einem 3D-Drucker gedruckt wurden, an den Ausschnitten für Geräte angebracht.An den Kanten der Elemente wurden Befestigungen für ihre Montage zu einer einzigen Flügelstruktur vorgenommen. Außerdem wurde im Flügel ein Platz für die Platzierung eines Funk-Transceivers, von Antrieben für Querruder, Drähte und anderer Ausrüstung ausgeschnitten. An den erforderlichen Stellen wurden Ausschnitte, die auf einem 3D-Drucker gedruckt wurden, an den Ausschnitten für Geräte angebracht.An den Kanten der Elemente wurden Befestigungen für ihre Montage zu einer einzigen Flügelstruktur vorgenommen. Außerdem wurde im Flügel ein Platz für die Platzierung eines Funk-Transceivers, von Antrieben für Querruder, Drähte und anderer Ausrüstung ausgeschnitten. An den erforderlichen Stellen wurden Ausschnitte, die auf einem 3D-Drucker gedruckt wurden, an den Ausschnitten für Geräte angebracht.An Stellen, an denen die Flügelkonsolen mit dem Mittelflügel verbunden sind, wurden auch Befestigungen für Längsträger vorgesehen, an deren Enden sich Hubschraubermotoren befinden. Die Befestigungen der Flügelkonsolen, Copterbalken und des Gefieders wurden mit Nylon unter Verwendung der SLS- Technologie mit erhöhter Genauigkeit gedruckt . Die Halterungen der Coptermotoren wurden aus Sperrholz lasergeschnitten und mit Polyesterharz verklebt.
Flugzeugpropeller-Durchflusstest in ANSYS FluentBei der Arbeit an der Struktur musste besonderes Augenmerk auf die Karosserie und den Flügel des Flugzeugs gelegt werden, da diese die maximale Anzahl von Teilen aufweisen und den größten Einfluss auf die Tragfähigkeit und Dynamik des Flugzeugs haben. Ein besonderer Ansatz für diese Elemente war nicht nur während der Entwicklung, sondern auch während der Montage erforderlich, da sie unter Beibehaltung ihrer ausreichenden Festigkeit so leicht wie möglich gemacht werden mussten.Der Flügel des Flugzeugs bestand aus drei Komponenten: dem Mittelteil und der rechten und linken Konsole. Die Basis für die Konstruktion des Flügels war extrudierter Polystyrolschaum. Teile des Flügels wurden so konstruiert, dass ihre Oberfläche gerade war, und dank dieser konnte eine CNC-Drahtmaschine zum präzisen Schneiden von Polyester verwendet werden. Danach wurde der vorgefertigte Polyester einer zusätzlichen Verarbeitung unterzogen, um seine Festigkeit zu erhöhen und die aerodynamische Leistung zu verbessern. So wurde der Mittelteilrohling mit Kohlefaser und Polyesterharz laminiert; Um das Werkstück glatt und gleichmäßig zu halten, wurde es für die Dauer der Laminierung mit Plexiglas umwickelt, in einen Vakuumbeutel gegeben und in einem Polystyrolschaum-Negativ fixiert.Es war nicht möglich, Kohlefaser für die Herstellung von Flügelkonsolen zu verwenden, auch aus dem Grund, dass Funkübertragungsgeräte in diesen Teilen angebracht werden mussten (Kohle erzeugt Interferenzen), weshalb die Konsolen mit einer Glasfaserschicht und einer Balsaschicht laminiert wurden. An den Kanten der Elemente wurden Befestigungen für ihre Montage zu einer einzigen Flügelstruktur vorgenommen. Außerdem wurde im Flügel ein Platz für die Platzierung eines Funk-Transceivers, von Antrieben für Querruder, Drähte und anderer Ausrüstung ausgeschnitten. An den erforderlichen Stellen wurden Ausschnitte, die auf einem 3D-Drucker gedruckt wurden, an den Ausschnitten für Geräte angebracht.An den Kanten der Elemente wurden Befestigungen für ihre Montage zu einer einzigen Flügelstruktur vorgenommen. Außerdem wurde im Flügel ein Platz für die Platzierung eines Funk-Transceivers, von Antrieben für Querruder, Drähte und anderer Ausrüstung ausgeschnitten. An den erforderlichen Stellen wurden Ausschnitte, die auf einem 3D-Drucker gedruckt wurden, an den Ausschnitten für Geräte angebracht.An den Kanten der Elemente wurden Befestigungen für ihre Montage zu einer einzigen Flügelstruktur vorgenommen. Außerdem wurde im Flügel ein Platz für die Platzierung eines Funk-Transceivers, von Antrieben für Querruder, Drähte und anderer Ausrüstung ausgeschnitten. An den erforderlichen Stellen wurden Ausschnitte, die auf einem 3D-Drucker gedruckt wurden, an den Ausschnitten für Geräte angebracht.An Stellen, an denen die Flügelkonsolen mit dem Mittelflügel verbunden sind, wurden auch Befestigungen für Längsträger vorgesehen, an deren Enden sich Hubschraubermotoren befinden. Die Befestigungen der Flügelkonsolen, Copterbalken und des Gefieders wurden mit Nylon unter Verwendung der SLS- Technologie mit erhöhter Genauigkeit gedruckt . Die Halterungen der Coptermotoren wurden aus Sperrholz lasergeschnitten und mit Polyesterharz verklebt. Mittelteil im HerstellungsprozessDer Rahmen des Gehäuses bestand ebenfalls aus Sperrholz. Die notwendigen Teile wurden mit einem Laser aus Sperrholz geschnitten und dann mit Cyanoacrylatkleber zu einer einzigen Struktur verklebt. Der Rahmen wurde mit Balsa überklebt, an der Nase verstärkt und mit Kohlefaser gebogen und dann mit Glasfaser laminiert. Das Design bot Platz für eine Kamera mit einem Stabilisator (Vorderseite des Rumpfes), Batterien (Rückseite des Rumpfes) sowie einem Bordcomputer und einer Flugsteuerung (Mitte des Rumpfes). Zusätzlich wurden Verbindungen für den Flügel- und Heckausleger entwickelt, die es ermöglichten, die Strom- und Signaldrähte bequem innerhalb der Flugzeugstruktur zu positionieren.Der Stabilisator und der Aufzug wurden nach dem Verfahren hergestellt, das der Herstellung eines Flugzeugflügels ähnlich ist.
Mittelteil im HerstellungsprozessDer Rahmen des Gehäuses bestand ebenfalls aus Sperrholz. Die notwendigen Teile wurden mit einem Laser aus Sperrholz geschnitten und dann mit Cyanoacrylatkleber zu einer einzigen Struktur verklebt. Der Rahmen wurde mit Balsa überklebt, an der Nase verstärkt und mit Kohlefaser gebogen und dann mit Glasfaser laminiert. Das Design bot Platz für eine Kamera mit einem Stabilisator (Vorderseite des Rumpfes), Batterien (Rückseite des Rumpfes) sowie einem Bordcomputer und einer Flugsteuerung (Mitte des Rumpfes). Zusätzlich wurden Verbindungen für den Flügel- und Heckausleger entwickelt, die es ermöglichten, die Strom- und Signaldrähte bequem innerhalb der Flugzeugstruktur zu positionieren.Der Stabilisator und der Aufzug wurden nach dem Verfahren hergestellt, das der Herstellung eines Flugzeugflügels ähnlich ist.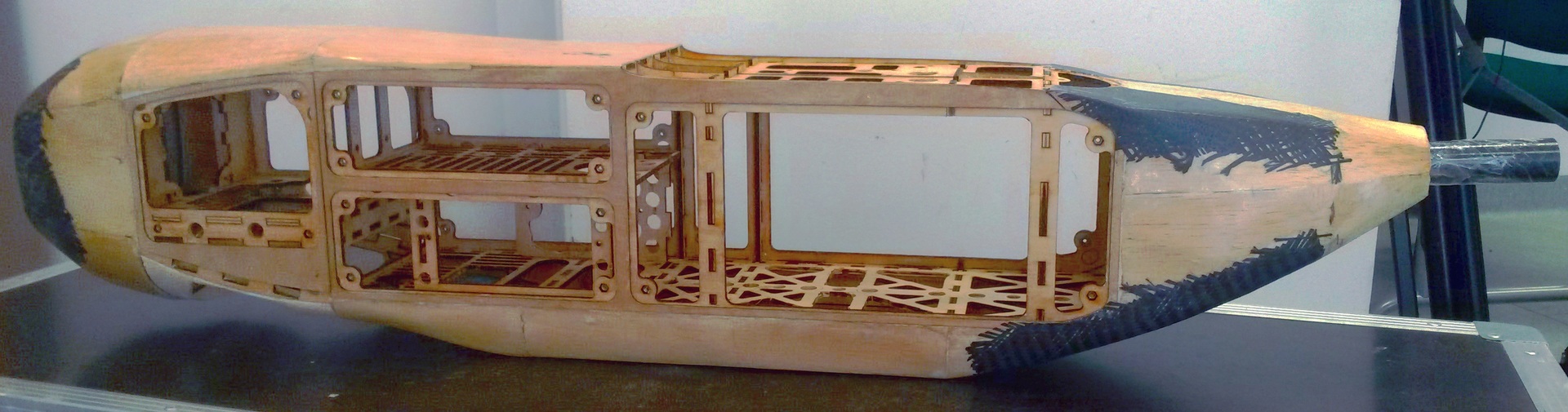 UAV-Rahmen
UAV-RahmenLeistungsteil
Als Hubschraubermotoren für das Gerät haben wir den größten genommen, der für uns im betrieblichen Zugangsbereich verfügbar war - den T-MOTOR U8 Pro 170KV mit den von T-MOTOR für diese Motoren empfohlenen Holzpropellern mit einem Durchmesser von 20 Zoll. ESC'i T-MOTOR FLAME 80A wurden ausgewählt, um die Drehzahl der Motoren zu steuern. Angetrieben von zwei Tattu 22000mah Sechs-Zellen-Lithium-Polymer-Batterien, die in Reihe geschaltet waren, ermöglichte ein solches Kraftwerk eine maximale vertikale Traktion von 20 Kilogramm.Für den Antrieb haben wir den Scorpion HKIII 4035 500KV-Motor mit dem ESC FOXY XR-120 OPTO gewählt, der von derselben Batterie angetrieben wird, an die die Copter-Motoren angeschlossen sind.Das endgültige Startgewicht des Flugzeugs mit der gesamten Ausrüstung an Bord betrug 14 Kilogramm. Die Höchstgeschwindigkeit des Flugzeugs beträgt 40 m / s, die Reisegeschwindigkeit 25 m / s, die Strömungsgeschwindigkeit 18 m / s, die Flugdauer im Flugzeugmodus mehr als eine Stunde und die Flugreichweite bis zu 100 km, was uns hätte ermöglichen sollen Missionen auch bei widrigen Wetterbedingungen.Computer Vision System
Ein wichtiger Teil des Hauptflugzeugs war für uns das Bord-Computer-Vision-System, ohne das es unmöglich ist, Joe zu finden und die Mission abzuschließen. Die Hauptelemente des Systems waren die JAI GO 2400 RGB-Kamera mit Vollbildübertragung und Full HD-Auflösung sowie der leistungsstarke GIGABYTE BXi7-5775-Minicomputer. Die Kamera wurde unter der Kontrolle des Alexmos-Controllers auf einer stabilisierenden Aufhängung unseres ursprünglichen mechanischen Designs montiert. Dadurch konnten wir Bilder mit einer konstanten Neigung zum Boden erhalten, sodass die Silhouette einer Person auf ihnen klar erkennbar war. Der Computer wurde an die Flugsteuerung angeschlossen, um Telemetriedaten und -befehle bereitzustellen. Darüber hinaus wurde dem Computer mithilfe eines 4G-Modems Zugriff auf den FTP-Server gewährt.über die die Kommunikation mit der Station des Betreibers des Computer-Vision-Systems hergestellt wurde. Der Algorithmus des Programms, das wir an Bord gestartet haben, wird im nächsten Absatz kurz beschrieben.Nach dem Empfang des Bildes von der Kamera wird das letzte vom Flugcontroller empfangene Telemetriedatenpaket sofort daran angehängt, sodass Sie für jedes Pixel im Bild seine Geokoordinaten grob berechnen können. Danach wird nach interessierenden Bereichen gesucht: Dazu wird ein Bildhistogramm erstellt und darin Ebenen ausgewählt, deren Anzahl von Pixeln größer als ein bestimmter Schwellenwert ist - dies sind die Ebenen von „uninteressanten“ Regionen, und die entsprechenden Pixel werden nicht weiter betrachtet. Die verbleibenden „interessanten“ Pixel werden einer morphologischen Erosion unterzogen, sodass nur noch in Gruppen kombinierte Pixel übrig bleiben. Diese Gruppen werden nach Konzentration, Größe und Farbe sortiert, und als Ergebnis erhalten wir eine Ranggruppe von Bereichen im Bild, die zumindest ähnlich aussehen können pro Person.Danach berechnen wir für jeden dieser BereicheHOG- Deskriptor und unter Verwendung des Vektors der Unterstützungsvektoren klassifizieren wir ihn als Person oder Nicht-Person. Wenn eine Region als Person klassifiziert ist, bedeutet dies nicht, dass wir sie sofort wirklich als solche betrachten - sie erhält lediglich ein signifikantes Plus im Ranking. Anschließend werden Bilder aller gefundenen Bereiche von Interesse in der ihrer Bewertung entsprechenden Reihenfolge an den FTP-Server gesendet. Die Datei jedes solchen Bildes enthält Informationen über die Geolokalisierung der Region und die Kennung des vollständigen Bildes, aus dem die Region stammt.Mit der Anwendung an der Operator Station können Sie Bilder von Bereichen von Interesse anzeigen, die vom Gerät auf einen FTP-Server hochgeladen wurden, sowie eine Karte des Bereichs, über den das Gerät fliegt, und diese nach Bewertung und Zeit sortieren. Wenn der Betreiber aufgrund eines bestimmten Interessenbereichs den Verdacht hat, kann er erneut über einen FTP-Server eine Anfrage an das Flugzeug senden, sodass er ein vollständiges Foto hochlädt, das dem ausgewählten Interessengebiet entspricht. Wenn der Betreiber in einem der angezeigten Interessenbereiche die gesuchte Person erkennt, kann er seine bevorzugten Landekoordinaten an den Bordcomputer senden und der Computer leitet sie an den Fluglotsen weiter.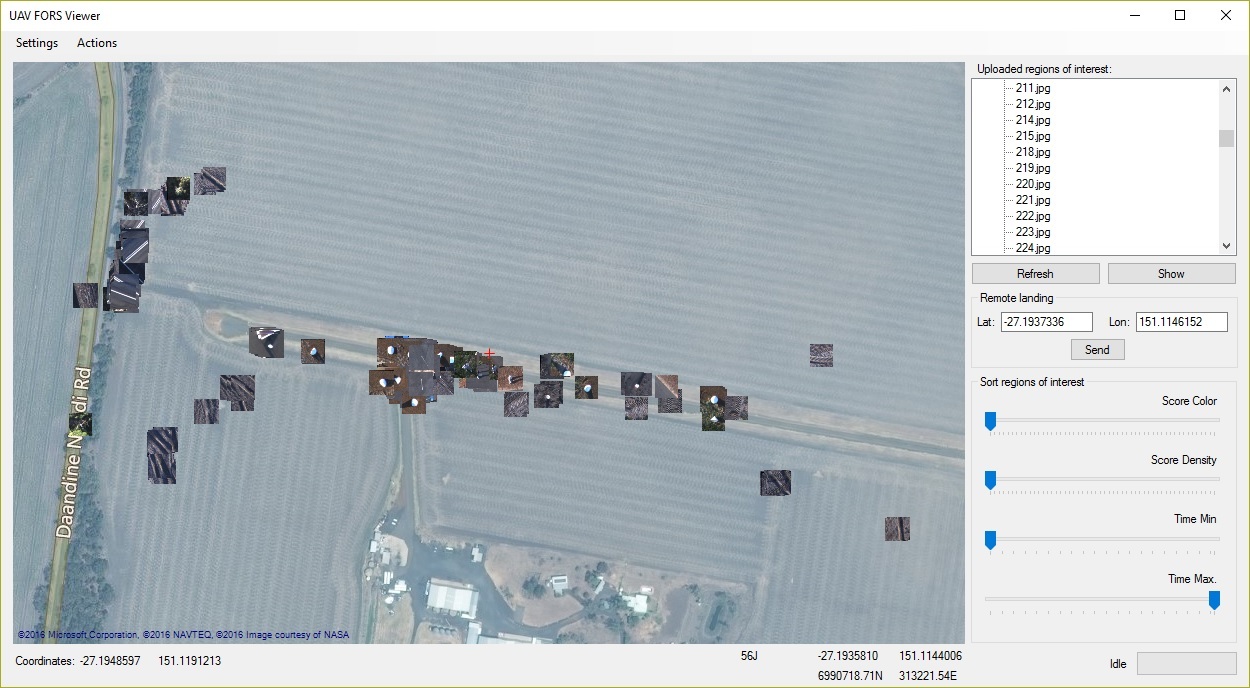 Bewerbung an der Operator StationDie Maschine der Unterstützungsvektoren zur Klassifizierung einer Person wurde von uns an den Beispielen von Fotos geschult, die während Testflügen aufgenommen wurden. Bevor wir den HOG-Deskriptor für jeden der interessierenden Bereiche berechnen, führen wir einige geometrische Transformationen für den Bereich durch, um die potenzielle Person im Bild in eine vertikale Position zu bringen, da das traditionelle HOG gut funktioniert, um die Person nur in stehender Position zu klassifizieren.Klassifizierung von Regionen von Interesse an Bord der Drohne: roter Umriss - Die Region wird als Nicht-Person klassifiziert. der grüne Umriss - die Region wird als Person klassifiziertDa die Aufgabe nicht nur darin bestand, eine Person zu finden, sondern auch einen geeigneten Landeplatz auszuwählen, wurde zusätzlich zu den oben genannten Operationen das Computer-Vision-System des Hauptflugzeugs so programmiert, dass es das Gebiet klassifiziert, über das das Flugzeug flog. Unter den möglichen Klassen wurden identifiziert: Land, Asphalt, Gras, Büsche und Bäume, nicht spezifizierte Hindernisse; Die Klassifizierung basiert auf Informationen über die Farbe und Heterogenität des Bildes an einem bestimmten Ort. Wenn der Bediener der Workstation eine Entscheidung über den Landeplatz treffen muss, kann er vom Flugzeug Informationen über die Klassifizierung des interessierenden Kartenabschnitts anfordern.
Bewerbung an der Operator StationDie Maschine der Unterstützungsvektoren zur Klassifizierung einer Person wurde von uns an den Beispielen von Fotos geschult, die während Testflügen aufgenommen wurden. Bevor wir den HOG-Deskriptor für jeden der interessierenden Bereiche berechnen, führen wir einige geometrische Transformationen für den Bereich durch, um die potenzielle Person im Bild in eine vertikale Position zu bringen, da das traditionelle HOG gut funktioniert, um die Person nur in stehender Position zu klassifizieren.Klassifizierung von Regionen von Interesse an Bord der Drohne: roter Umriss - Die Region wird als Nicht-Person klassifiziert. der grüne Umriss - die Region wird als Person klassifiziertDa die Aufgabe nicht nur darin bestand, eine Person zu finden, sondern auch einen geeigneten Landeplatz auszuwählen, wurde zusätzlich zu den oben genannten Operationen das Computer-Vision-System des Hauptflugzeugs so programmiert, dass es das Gebiet klassifiziert, über das das Flugzeug flog. Unter den möglichen Klassen wurden identifiziert: Land, Asphalt, Gras, Büsche und Bäume, nicht spezifizierte Hindernisse; Die Klassifizierung basiert auf Informationen über die Farbe und Heterogenität des Bildes an einem bestimmten Ort. Wenn der Bediener der Workstation eine Entscheidung über den Landeplatz treffen muss, kann er vom Flugzeug Informationen über die Klassifizierung des interessierenden Kartenabschnitts anfordern.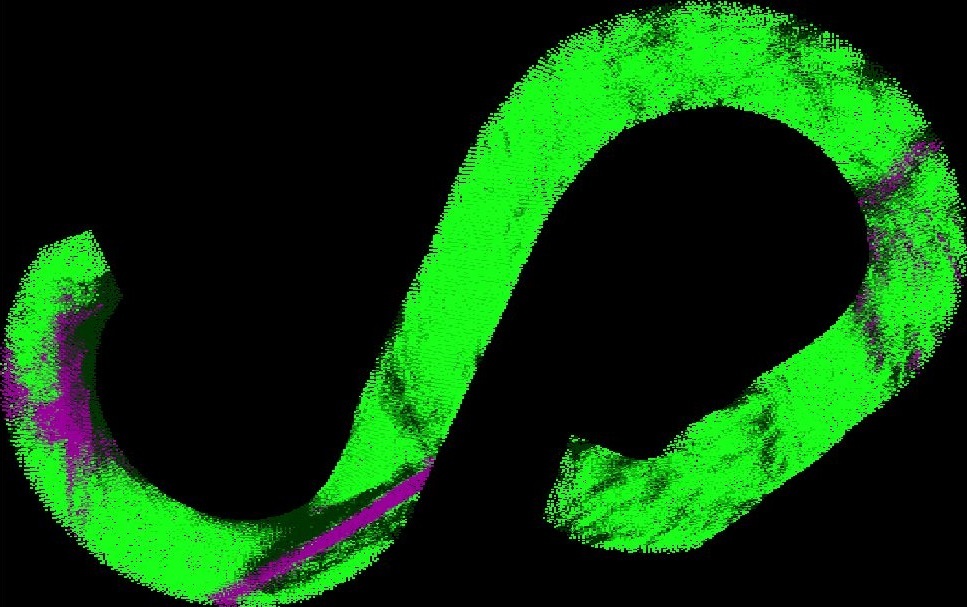 : - — , - — , —Zusätzlich zu der beschriebenen Hauptdrohne haben wir uns für eine Hilfsdrohne entschieden, die für die Weiterleitung im Kommunikationskanal zwischen der Bodenstation des Betreibers und dem Hauptflugzeug verantwortlich ist. Wenn unsere Hauptdrohne mehrere Kilometer von der Bodenstation entfernt ist, wird die Aufrechterhaltung der direkten Funkkommunikation zum Empfangen von Telemetriedaten und zum Senden von Befehlen problematisch, sowohl aufgrund einer Abnahme der Signalleistung mit zunehmender Entfernung als auch aufgrund des Auftretens von Hindernissen auf der Sichtlinie zwischen ihnen Antennen am Boden und an Bord des Geräts. Es ist nicht immer möglich, die Schwierigkeit des Aufbaus einer direkten Funkkommunikation durch Erhöhen der Signalleistung zu bewältigen, da es erstens staatliche Beschränkungen gibt, die die maximal zulässige Funksignalleistung bestimmen, und zweitensEine Leistungssteigerung führt möglicherweise nicht zu einem positiven Ergebnis, insbesondere wenn sich das Flugzeug in geringer Höhe in großer Entfernung befindet. Wir lösen dieses Problem, indem wir einen Repeater, der sich in großer Höhe befindet, in der Sichtlinie sowohl von der Bedienstation als auch vom „funktionierenden“ Flugzeug aus hinzufügen.Für die Übertragung der Relaisausrüstung verwendeten wir einen fliegenden Flügel, der auf der ziemlich beliebten Skywalker X8-Plattform basiert. In diesem Fall passt der fliegende Flügel in die Einschränkungen, die durch die unbekannte Landschaft der Startrampe verursacht werden, da er von einem leichten Katapult oder von einem Bungee aus gestartet werden kann und automatisch landen kann, ohne dass hierfür ein erheblicher offener Raum erforderlich ist. Damit das Flugzeug ohne Fahrwerk landen kann, ohne nennenswerte Schäden zu erleiden, haben wir den unteren Teil des Rumpfes mit Kevlar und Glasfaser laminiert. Um die strukturelle Festigkeit zu erhöhen und die Möglichkeit zu bieten, mit höheren Geschwindigkeiten zu fliegen, wurde außerdem die Vorderkante des Flügels mit Glasfaser laminiert. Der X8 war mit einem 710-kV-Motor ausgestattet, der für Lithium-Polymer-Batterien mit fünf Zellen ausgelegt war.und eine Batterie für diesen Motor für 16 Amperestunden mit sechs Zellen. Aufgrund der Tatsache, dass wir eine Batterie mit einer Spannung verwendet haben, die höher als die Nennspannung des Motors ist, mussten wir bei der Konstruktion einen zusätzlichen Lufteinlass für die Kühlung bereitstellen. Für den Motor wurden ein Drehzahlregler von 70 A und ein Faltpropeller von 9,5 x 8 verwendet. Bei Elevons haben wir das hochwertige Servo HS-5625MG von Hitec geliefert. Die Server haben einen erheblichen Leistungsspielraum, der die Möglichkeit des Verlusts von Steuerflächen minimieren sollte, von denen jede im Fall eines fliegenden Flügels kritisch ist. Darüber hinaus befanden sich an Bord zusätzliche kleine Batterien für die Avionik und ein Notflugabschlusssystem sowie ein Flugregler (Pixhawk). Infolgedessen waren die Eigenschaften des Geräts wie folgt: Gewicht - 3,5 kg,Höchstgeschwindigkeit - 35 m / s, Reisegeschwindigkeit - 25 m / s, Flugzeit - bis zu 55 Minuten, zurückgelegte Strecke - mehr als 80 km.
: - — , - — , —Zusätzlich zu der beschriebenen Hauptdrohne haben wir uns für eine Hilfsdrohne entschieden, die für die Weiterleitung im Kommunikationskanal zwischen der Bodenstation des Betreibers und dem Hauptflugzeug verantwortlich ist. Wenn unsere Hauptdrohne mehrere Kilometer von der Bodenstation entfernt ist, wird die Aufrechterhaltung der direkten Funkkommunikation zum Empfangen von Telemetriedaten und zum Senden von Befehlen problematisch, sowohl aufgrund einer Abnahme der Signalleistung mit zunehmender Entfernung als auch aufgrund des Auftretens von Hindernissen auf der Sichtlinie zwischen ihnen Antennen am Boden und an Bord des Geräts. Es ist nicht immer möglich, die Schwierigkeit des Aufbaus einer direkten Funkkommunikation durch Erhöhen der Signalleistung zu bewältigen, da es erstens staatliche Beschränkungen gibt, die die maximal zulässige Funksignalleistung bestimmen, und zweitensEine Leistungssteigerung führt möglicherweise nicht zu einem positiven Ergebnis, insbesondere wenn sich das Flugzeug in geringer Höhe in großer Entfernung befindet. Wir lösen dieses Problem, indem wir einen Repeater, der sich in großer Höhe befindet, in der Sichtlinie sowohl von der Bedienstation als auch vom „funktionierenden“ Flugzeug aus hinzufügen.Für die Übertragung der Relaisausrüstung verwendeten wir einen fliegenden Flügel, der auf der ziemlich beliebten Skywalker X8-Plattform basiert. In diesem Fall passt der fliegende Flügel in die Einschränkungen, die durch die unbekannte Landschaft der Startrampe verursacht werden, da er von einem leichten Katapult oder von einem Bungee aus gestartet werden kann und automatisch landen kann, ohne dass hierfür ein erheblicher offener Raum erforderlich ist. Damit das Flugzeug ohne Fahrwerk landen kann, ohne nennenswerte Schäden zu erleiden, haben wir den unteren Teil des Rumpfes mit Kevlar und Glasfaser laminiert. Um die strukturelle Festigkeit zu erhöhen und die Möglichkeit zu bieten, mit höheren Geschwindigkeiten zu fliegen, wurde außerdem die Vorderkante des Flügels mit Glasfaser laminiert. Der X8 war mit einem 710-kV-Motor ausgestattet, der für Lithium-Polymer-Batterien mit fünf Zellen ausgelegt war.und eine Batterie für diesen Motor für 16 Amperestunden mit sechs Zellen. Aufgrund der Tatsache, dass wir eine Batterie mit einer Spannung verwendet haben, die höher als die Nennspannung des Motors ist, mussten wir bei der Konstruktion einen zusätzlichen Lufteinlass für die Kühlung bereitstellen. Für den Motor wurden ein Drehzahlregler von 70 A und ein Faltpropeller von 9,5 x 8 verwendet. Bei Elevons haben wir das hochwertige Servo HS-5625MG von Hitec geliefert. Die Server haben einen erheblichen Leistungsspielraum, der die Möglichkeit des Verlusts von Steuerflächen minimieren sollte, von denen jede im Fall eines fliegenden Flügels kritisch ist. Darüber hinaus befanden sich an Bord zusätzliche kleine Batterien für die Avionik und ein Notflugabschlusssystem sowie ein Flugregler (Pixhawk). Infolgedessen waren die Eigenschaften des Geräts wie folgt: Gewicht - 3,5 kg,Höchstgeschwindigkeit - 35 m / s, Reisegeschwindigkeit - 25 m / s, Flugzeit - bis zu 55 Minuten, zurückgelegte Strecke - mehr als 80 km. Es ist zu beachten, dass das Hinzufügen eines zusätzlichen Flugzeugs zum System zur Vergrößerung des Abdeckungsbereichs der Kommunikation zu dem Problem der Organisation der Kommunikation selbst führt, da in diesem Fall die Basisstation neben der Analyse der Telemetrie von der Hauptdrohne und dem Senden von Befehlen an diese die vollständige Kommunikation mit dem Hilfsflugzeug unterstützen muss Apparate. Natürlich kann diese Kommunikation durch Hinzufügen von zwei zusätzlichen Funkmodems (eines für die Hilfsdrohne, das andere für die Bodenstation) organisiert werden, die in einem Kanal arbeiten, der die bereits im System vorhandenen Geräte nicht stört. Diese Option ist jedoch aufgrund zusätzlicher Kosten und mangelnder Skalierbarkeit beim Hinzufügen neuer Drohnen zum System nicht optimal.Am besten verwenden Sie einen vorhandenen Funk-Transceiver, um mit dem Hilfsflugzeug zu kommunizieren. In diesem Fall sieht das Kommunikationsschema im System wie in der folgenden Abbildung dargestellt aus.
Es ist zu beachten, dass das Hinzufügen eines zusätzlichen Flugzeugs zum System zur Vergrößerung des Abdeckungsbereichs der Kommunikation zu dem Problem der Organisation der Kommunikation selbst führt, da in diesem Fall die Basisstation neben der Analyse der Telemetrie von der Hauptdrohne und dem Senden von Befehlen an diese die vollständige Kommunikation mit dem Hilfsflugzeug unterstützen muss Apparate. Natürlich kann diese Kommunikation durch Hinzufügen von zwei zusätzlichen Funkmodems (eines für die Hilfsdrohne, das andere für die Bodenstation) organisiert werden, die in einem Kanal arbeiten, der die bereits im System vorhandenen Geräte nicht stört. Diese Option ist jedoch aufgrund zusätzlicher Kosten und mangelnder Skalierbarkeit beim Hinzufügen neuer Drohnen zum System nicht optimal.Am besten verwenden Sie einen vorhandenen Funk-Transceiver, um mit dem Hilfsflugzeug zu kommunizieren. In diesem Fall sieht das Kommunikationsschema im System wie in der folgenden Abbildung dargestellt aus.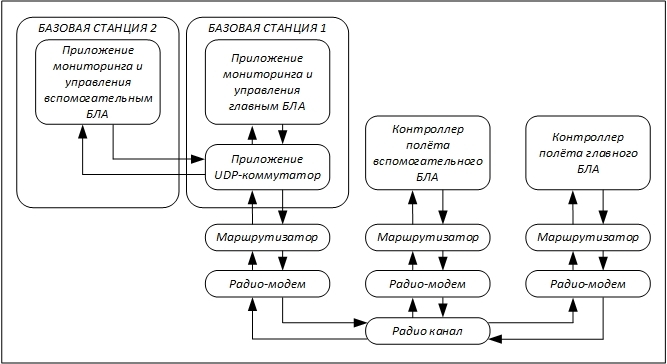
Fazit
Gemäß den Anforderungen des Wettbewerbs flog jedes der beschriebenen Flugzeuge für den Übergang zum letzten Teil mehr als fünf Stunden; Während dieser Testflüge haben wir viele kleine und signifikante Probleme und Fehler identifiziert und behoben. Unser Videobericht für diese Phase sah folgendermaßen aus:Einer der unangenehmsten Fehler in der mechanischen Konstruktion, den wir während der Vorbereitungsflüge bemerkten, war eine signifikante Asymmetrie der Belastung der Hubschraubermotoren während der Umstellung vom Flugzeugmodus auf Hubschrauber. Tatsache ist, dass ein positiver Anstellwinkel des Flügels des Flugzeugs bei niedrigen Geschwindigkeiten die Strahlen mit Hubschraubermotoren nach hinten ablenkt, so dass zwei Motoren, die näher am Heck des Flugzeugs liegen, während des Umbaus eine große Last erhalten. Zusätzlich erzeugt das reaktive Moment vom Flugzeugpropeller eine zusätzliche Belastung für die Motoren auf der linken Seite, so dass der linke hintere Motor am intensivsten ist. In unserem Fall führte eine solche Unebenheit mehrmals zu Fehlfunktionen des Kraftwerks und zu einem instabilen Verhalten des Flugzeugs, das einst zu einem Sturz mit schweren Schäden am Rumpf führte. Mit der ZeitAls wir den Grund für ein derart falsches Verhalten des Geräts (drei Monate vor dem Wettbewerb) identifizierten, war es zu spät, Änderungen an der Mechanik vorzunehmen oder das Konvertierungsprogramm anzupassen. Daher gingen wir das Risiko ein, weiterhin an der Herausforderung teilzunehmen, da wir wussten, dass unser Design im Falle eines Unfalls nicht redundant ist . Trotzdem haben wir auf jede erdenkliche Weise versucht, die Möglichkeit einer Fehlfunktion so gering wie möglich zu halten und die Wartungsfreundlichkeit aller Elemente, Anschlüsse und Vorrichtungen vor jedem Flug so weit wie möglich zu kontrollieren.Wir haben auf jede erdenkliche Weise versucht, die Möglichkeit einer Fehlfunktion zu minimieren und gleichzeitig die Wartungsfreundlichkeit aller Elemente, Anschlüsse und Vorrichtungen vor jedem Flug maximal zu kontrollieren.Wir haben auf jede erdenkliche Weise versucht, die Möglichkeit einer Fehlfunktion zu minimieren und gleichzeitig die Wartungsfreundlichkeit aller Elemente, Anschlüsse und Vorrichtungen vor jedem Flug maximal zu kontrollieren.Leider reichten die Vorsichtsmaßnahmen nicht aus, und unser Quad-Flugzeug stürzte während eines der Testflüge ab, die wir in Australien durchgeführt hatten, um die strukturelle Integrität nach der Montage des Geräts auf dem Wettkampfgelände zu überprüfen. Im Falle eines Absturzes erlitt die gesamte Struktur erhebliche Schäden, so dass es nicht möglich war, den Apparat zu reparieren und zu versuchen, zumindest einen Teil der Mission abzuschließen. Die Organisatoren waren jedoch mit unserer Situation einverstanden und gaben uns die Erlaubnis, mit einem Zusatzgerät zu fliegen, um die Reichweite unserer Funkkommunikation und die Fähigkeit zu überprüfen, das Gerät außerhalb der Sichtlinie zu steuern.Am Ende ist anzumerken, dass keines der Teams in diesem Jahr die Mission des Wettbewerbs, die mit dem Verlust von Flugzeugen aus verschiedenen Gründen verbunden war, vollständig erfüllen konnte: Absturz, Feuer, Flug außerhalb des zugewiesenen Flugraums und in der Regel das Schweben auf einem Baum. Während der Herausforderung wurden das Team der TU Delft (das ursprüngliche mechanische Design und ein Testmodell des Computer-Vision-Systems von Parrot, ein Video über eine Drohne hier ) und Canberra UAV (lieferte eine Blutprobe, stürzte jedoch einen Hilfshubschrauber ab, ein Video über eine Drohne hier ) am meisten zur Kenntnis .Für uns wie für andere Teams war die Herausforderung eine hervorragende Plattform, um sich zu versuchen und mit Drohnenprofis aus der ganzen Welt zu kommunizieren. Wir haben großartige Erfahrungen gesammelt und viel Material gesammelt, das uns bei unseren persönlichen Projekten und bei der Vorbereitung auf die nächsten Wettbewerbe weiterhelfen wird.Materialien
" UAV Challenge Medical Express 2016 Rules". Ein Artikel der Organisatoren der Challenge über die Statistik und die Geschichte des Wettbewerbs.» Beschreibung des Erfolgs von Canberra UAV durch Andrew Trijell, den ideologischen Leiter des Teams.Source: https://habr.com/ru/post/de399699/
All Articles