Wissenschaftler haben einen Chip für die Echtzeitplanung von Roboterbewegungen entwickelt
 Wenn Sie jemals gesehen haben, wie die Demoversionen von Robotern funktionieren, haben Sie wahrscheinlich bemerkt, dass der Roboter lange Zeit „einfrieren“ kann, bevor er sich weiter bewegt. Sie könnten denken, dass der Roboter auf diese Weise darüber nachdenkt, an welchem Punkt und auf welchem Weg er sich bewegen soll. Diese Annahme ist nicht weit von der Wahrheit entfernt: In diesem Moment verarbeitet der Prozessor die Bewegungsplanungsvorgänge, was oft viel Zeit in Anspruch nimmt.Forscher der Duke University haben einen Weg gefunden, die Planung von Roboterbewegungen dreimal zu beschleunigen, indem sie ein Zwanzigstel der heute benötigten Leistung verbrauchen. Das Herzstück ihrer Lösung ist ein spezialisierter Prozessor, der den zeitaufwändigsten Teil der Arbeit - die Überprüfung aller möglichen Kollisionen im gesamten Bewegungsbereich des Roboters - mit hoher Effizienz ausführen kann.Die Bewegungsplanung beispielsweise für einen Roboterarm umfasst in erster Linie die Erstellung einer probabilistischen Routenkarte. Es ist ein Diagramm, das aus Punkten in einem hindernisfreien Raum besteht, wobei Rippenlinien diese Punkte verbinden, damit jede Bewegung zwischen ihnen nicht zu einer Kollision führt. Tatsächlich wählt der Bewegungsplaner die Start- und Endpunkte auf dem Diagramm aus und bestimmt dann die effektivste Art, sich zu bewegen, um von einem Punkt zum anderen zu gelangen.
Wenn Sie jemals gesehen haben, wie die Demoversionen von Robotern funktionieren, haben Sie wahrscheinlich bemerkt, dass der Roboter lange Zeit „einfrieren“ kann, bevor er sich weiter bewegt. Sie könnten denken, dass der Roboter auf diese Weise darüber nachdenkt, an welchem Punkt und auf welchem Weg er sich bewegen soll. Diese Annahme ist nicht weit von der Wahrheit entfernt: In diesem Moment verarbeitet der Prozessor die Bewegungsplanungsvorgänge, was oft viel Zeit in Anspruch nimmt.Forscher der Duke University haben einen Weg gefunden, die Planung von Roboterbewegungen dreimal zu beschleunigen, indem sie ein Zwanzigstel der heute benötigten Leistung verbrauchen. Das Herzstück ihrer Lösung ist ein spezialisierter Prozessor, der den zeitaufwändigsten Teil der Arbeit - die Überprüfung aller möglichen Kollisionen im gesamten Bewegungsbereich des Roboters - mit hoher Effizienz ausführen kann.Die Bewegungsplanung beispielsweise für einen Roboterarm umfasst in erster Linie die Erstellung einer probabilistischen Routenkarte. Es ist ein Diagramm, das aus Punkten in einem hindernisfreien Raum besteht, wobei Rippenlinien diese Punkte verbinden, damit jede Bewegung zwischen ihnen nicht zu einer Kollision führt. Tatsächlich wählt der Bewegungsplaner die Start- und Endpunkte auf dem Diagramm aus und bestimmt dann die effektivste Art, sich zu bewegen, um von einem Punkt zum anderen zu gelangen. Bewegungsplanungsalgorithmen suchen nach dem optimalen Pfad von einem Punkt zum anderen, um Hindernissen auszuweichen (links). Eine probabilistische Routenkarte mit Kanten, die Punkte im freien Raum verbinden (rechts).Theoretisch klingt es recht einfach, aber in der Praxis müssen Sie die Tatsache berücksichtigen, dass Sie mit einem Roboterarm arbeiten. Und wenn sich die Bürste von einem Punkt zum anderen bewegt, kann der Unterarm mit einem Hindernis kollidieren. Der Bereich, in dem sich der Roboterarm bewegt, wird als „Arbeitsvolumen“ bezeichnet.
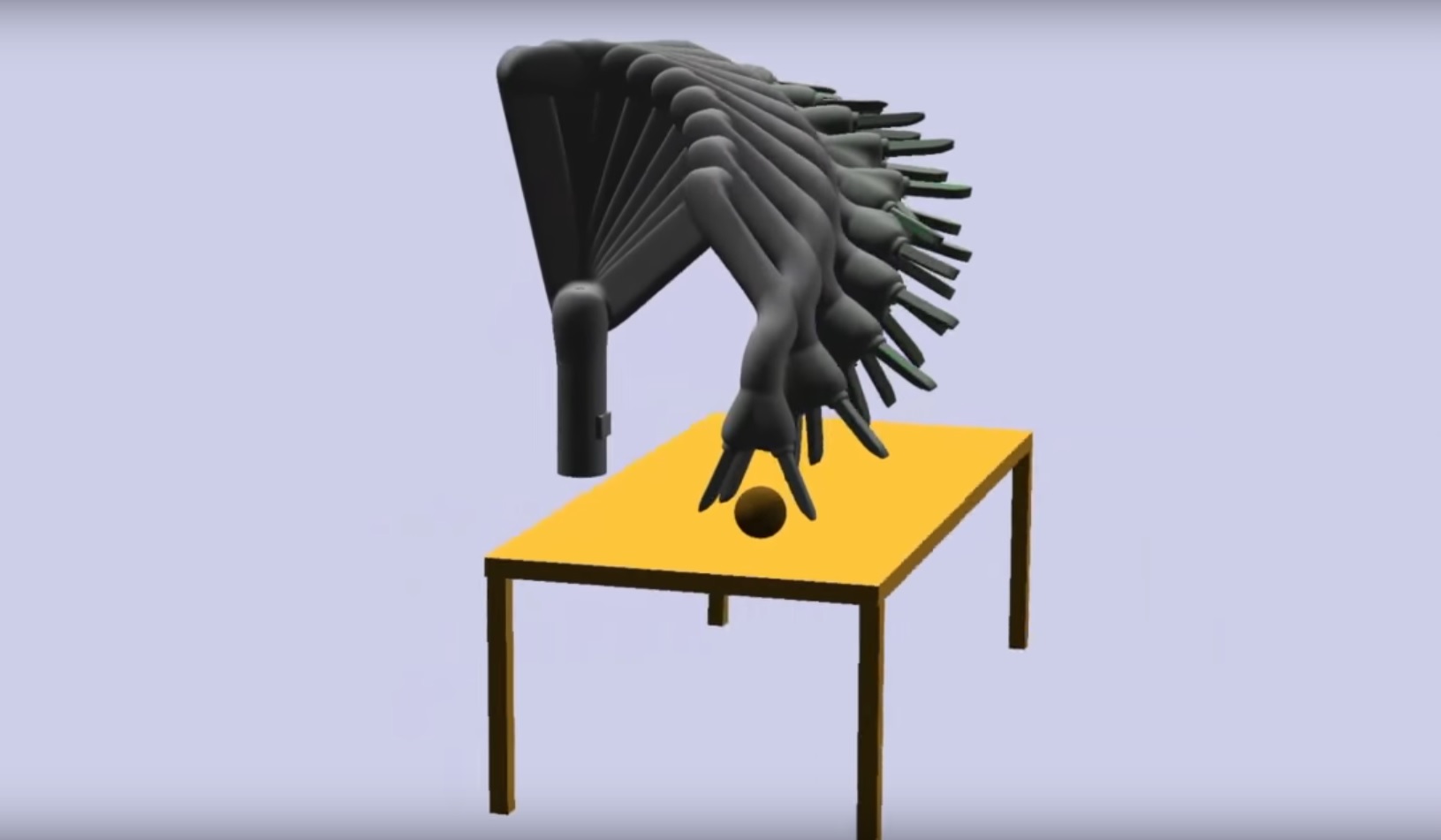
Bewegungsplanungsalgorithmen suchen nach dem optimalen Pfad von einem Punkt zum anderen, um Hindernissen auszuweichen (links). Eine probabilistische Routenkarte mit Kanten, die Punkte im freien Raum verbinden (rechts).Theoretisch klingt es recht einfach, aber in der Praxis müssen Sie die Tatsache berücksichtigen, dass Sie mit einem Roboterarm arbeiten. Und wenn sich die Bürste von einem Punkt zum anderen bewegt, kann der Unterarm mit einem Hindernis kollidieren. Der Bereich, in dem sich der Roboterarm bewegt, wird als „Arbeitsvolumen“ bezeichnet.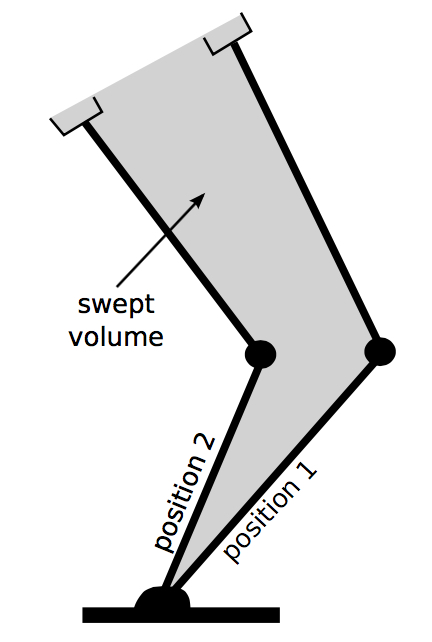 Das Arbeitsvolumen ist der Raum, in dem der Roboter seine Position von einer Position zur anderen ändert.Die Ergebnisse der Studie zeigten, dass die Erkennung von Hindernissen mehr als 99% der Rechenzeit in Anspruch nimmt. Vorberechnungen werden durchgeführt, wenn der Roboter konfiguriert ist. Sie erstellen eine Karte, die aus ungefähr 150.000 Kanten besteht und die möglichen Flugbahnen des Roboters beschreibt, während Sie Selbstkollisionen und Kollisionen mit Dingen vermeiden, die ihre Position nicht ändern, z. B. Geschlecht.150.000 Rippen sind zu viel für den Prototyp des Teamsystems der Duke University. Eine vernünftigere Zahl liegt nahe bei 1000, daher mussten die Forscher einen Weg finden, ihre Zahl zu reduzieren.Um den gesamten Prozess zu beschleunigen und zu vereinfachen, modellierten die Forscher zunächst etwa 10.000 Szenarien mit einer unterschiedlichen Anzahl zufällig angeordneter Hindernisse unterschiedlicher Größe und überprüften dann, welche Kanten auf der Karte vom System zur Planung der Bewegung verwendet werden. Selten verwendete Rippen wurden von der Karte entfernt. Nach mehreren Iterationen des Reduzierens und erneuten Überprüfens der Ergebnisse in einem Beispiel stellte sich heraus, dass die Anzahl der Kanten weniger als tausend betrug. Gleichzeitig hatte die Reduzierung keinen Einfluss auf die Fähigkeit, zwei Hauptprobleme des Bewegungsplaners zu lösen - langsame Verarbeitungsgeschwindigkeit und hoher Stromverbrauch.Das Begrenzen der Anzahl der Kanten auf der Karte auf einen akzeptablen Wert ist sehr wichtig, da die Funktionen des Prozessors, der Planungsvorgänge verarbeitet, begrenzt sind. In diesem Fall wird der Prozessor - FPGA (Programmable Logic Integrated Circuit ) - mit einem Array von Kollisionserkennungsschaltungen programmiert, von denen jede einer Kante auf der Karte entspricht. Daher ist die Größe der Karte durch die Anzahl solcher Schaltkreise begrenzt, die auf das FPGA passen - maximal mehrere Tausend.Die Technologie der Wissenschaftler der Duke University zerlegt den Arbeitsbereich in Tausende von Voxeln. Der Algorithmus bestimmt dann, ob eine vorprogrammierte Objekttrajektorie in eines der Voxel eingebettet ist. Dank FPGAs überprüft die Technologie Tausende von Routen gleichzeitig und näht dann den kürzesten Weg unter Verwendung der verbleibenden sicheren Optionen. Der Roboter kann es nur ausführen.Am Ausgang erhielten die Wissenschaftler eine erhebliche Beschleunigung: Unabhängig von der Anzahl der Kanten auf der Karte betrug die Verarbeitungsgeschwindigkeit des FPGA für die gesamte Karte 50 Nanosekunden pro Pixel. In einem besonders komplexen Beispiel dauerte die Verarbeitung etwas mehr als 0,6 ms. Der Scheduler, der auf Basis eines Quad-Core-Intel Xeon-Prozessors mit einer Taktfrequenz von 3,5 Gigahertz arbeitete, bewältigte diese Aufgabe in 2,738 ms. Herkömmliche Prozessoren verbrauchen während der Bewegungsplanung etwa 200 bis 300 Watt Strom, und die Entwicklung von Wissenschaftlern der Duke University beträgt weniger als 10 Watt.Industrieroboter verwenden jetzt keine Bewegungsplaner mehr. Wenn es zum Beispiel um die Montage von Autos am Fließband mit Robotern geht, ist die Umgebung so geplant, dass Roboter dieselben Bewegungen immer wieder blind wiederholen können. Sie haben einfach nicht die Möglichkeit, einen Fehler zu machen: Die Teile des Autos befinden sich jedes Mal am selben Ort, und die Roboter werden in speziellen Kisten aufbewahrt, die sie vor Menschen schützen. Wenn der Roboter jedoch Echtzeit-Bewegungsplanungsalgorithmen verwendet, kann er nicht durch vorbeigehende Personen oder eine Fehlfunktion des Förderers behindert werden - Roboter erledigen ihre Arbeit mit der üblichen Genauigkeit.Die Echtzeit-Verkehrsplanung spart Zeit und Kosten für die Entwicklung der Umgebung der Roboterumgebung. Wissenschaftler haben sich in den letzten 30 Jahren mit Planungstechnologie befasst, und die jüngsten Fortschritte haben es ermöglicht, innerhalb von Sekunden einen verbesserten Bewegungsplan zu erstellen. Bestehende Ansätze basieren mit einigen Ausnahmen auf den Fähigkeiten von Zentralprozessoren oder schnelleren, aber auch energieintensiveren GPUs. Laut Wissenschaftlern kann der Zentralprozessor verschiedene Arten von Aufgaben gut lösen, kann jedoch nicht mit einem Prozessor konkurrieren, der speziell für nur eine bestimmte Aufgabe entwickelt wurde.Dinesh Manocha, Professor an der Universität von North Carolina in Chapel HillFPGAs, der an einem Echtzeit-Bewegungsplaner für GPUs arbeitet, sind sich einig, dass FPGAs das Potenzial haben, die Effizienz der Bewegungsplanung zu steigern. Er ist zuversichtlich, dass die Entwicklung von Wissenschaftlern in naher Zukunft ihre praktische Anwendung finden wird: Roboter werden zunehmend unter neuen, unsicheren Bedingungen eingesetzt, die Rolle der Verkehrsplanung wird mit der Zeit nur noch zunehmen.Startup Realtime Robotics wird Technologiewissenschaftler kommerzialisieren. Im Rahmen dieses Projekts werden FPGAs durch spezielle integrierte Schaltkreise ( ASICs ) ersetzt, die mehr als 100.000 Kanten kombinieren können. Ein solches Upgrade ermöglicht es Robotern, in einer Vielzahl von Umgebungen zu arbeiten.
Das Arbeitsvolumen ist der Raum, in dem der Roboter seine Position von einer Position zur anderen ändert.Die Ergebnisse der Studie zeigten, dass die Erkennung von Hindernissen mehr als 99% der Rechenzeit in Anspruch nimmt. Vorberechnungen werden durchgeführt, wenn der Roboter konfiguriert ist. Sie erstellen eine Karte, die aus ungefähr 150.000 Kanten besteht und die möglichen Flugbahnen des Roboters beschreibt, während Sie Selbstkollisionen und Kollisionen mit Dingen vermeiden, die ihre Position nicht ändern, z. B. Geschlecht.150.000 Rippen sind zu viel für den Prototyp des Teamsystems der Duke University. Eine vernünftigere Zahl liegt nahe bei 1000, daher mussten die Forscher einen Weg finden, ihre Zahl zu reduzieren.Um den gesamten Prozess zu beschleunigen und zu vereinfachen, modellierten die Forscher zunächst etwa 10.000 Szenarien mit einer unterschiedlichen Anzahl zufällig angeordneter Hindernisse unterschiedlicher Größe und überprüften dann, welche Kanten auf der Karte vom System zur Planung der Bewegung verwendet werden. Selten verwendete Rippen wurden von der Karte entfernt. Nach mehreren Iterationen des Reduzierens und erneuten Überprüfens der Ergebnisse in einem Beispiel stellte sich heraus, dass die Anzahl der Kanten weniger als tausend betrug. Gleichzeitig hatte die Reduzierung keinen Einfluss auf die Fähigkeit, zwei Hauptprobleme des Bewegungsplaners zu lösen - langsame Verarbeitungsgeschwindigkeit und hoher Stromverbrauch.Das Begrenzen der Anzahl der Kanten auf der Karte auf einen akzeptablen Wert ist sehr wichtig, da die Funktionen des Prozessors, der Planungsvorgänge verarbeitet, begrenzt sind. In diesem Fall wird der Prozessor - FPGA (Programmable Logic Integrated Circuit ) - mit einem Array von Kollisionserkennungsschaltungen programmiert, von denen jede einer Kante auf der Karte entspricht. Daher ist die Größe der Karte durch die Anzahl solcher Schaltkreise begrenzt, die auf das FPGA passen - maximal mehrere Tausend.Die Technologie der Wissenschaftler der Duke University zerlegt den Arbeitsbereich in Tausende von Voxeln. Der Algorithmus bestimmt dann, ob eine vorprogrammierte Objekttrajektorie in eines der Voxel eingebettet ist. Dank FPGAs überprüft die Technologie Tausende von Routen gleichzeitig und näht dann den kürzesten Weg unter Verwendung der verbleibenden sicheren Optionen. Der Roboter kann es nur ausführen.Am Ausgang erhielten die Wissenschaftler eine erhebliche Beschleunigung: Unabhängig von der Anzahl der Kanten auf der Karte betrug die Verarbeitungsgeschwindigkeit des FPGA für die gesamte Karte 50 Nanosekunden pro Pixel. In einem besonders komplexen Beispiel dauerte die Verarbeitung etwas mehr als 0,6 ms. Der Scheduler, der auf Basis eines Quad-Core-Intel Xeon-Prozessors mit einer Taktfrequenz von 3,5 Gigahertz arbeitete, bewältigte diese Aufgabe in 2,738 ms. Herkömmliche Prozessoren verbrauchen während der Bewegungsplanung etwa 200 bis 300 Watt Strom, und die Entwicklung von Wissenschaftlern der Duke University beträgt weniger als 10 Watt.Industrieroboter verwenden jetzt keine Bewegungsplaner mehr. Wenn es zum Beispiel um die Montage von Autos am Fließband mit Robotern geht, ist die Umgebung so geplant, dass Roboter dieselben Bewegungen immer wieder blind wiederholen können. Sie haben einfach nicht die Möglichkeit, einen Fehler zu machen: Die Teile des Autos befinden sich jedes Mal am selben Ort, und die Roboter werden in speziellen Kisten aufbewahrt, die sie vor Menschen schützen. Wenn der Roboter jedoch Echtzeit-Bewegungsplanungsalgorithmen verwendet, kann er nicht durch vorbeigehende Personen oder eine Fehlfunktion des Förderers behindert werden - Roboter erledigen ihre Arbeit mit der üblichen Genauigkeit.Die Echtzeit-Verkehrsplanung spart Zeit und Kosten für die Entwicklung der Umgebung der Roboterumgebung. Wissenschaftler haben sich in den letzten 30 Jahren mit Planungstechnologie befasst, und die jüngsten Fortschritte haben es ermöglicht, innerhalb von Sekunden einen verbesserten Bewegungsplan zu erstellen. Bestehende Ansätze basieren mit einigen Ausnahmen auf den Fähigkeiten von Zentralprozessoren oder schnelleren, aber auch energieintensiveren GPUs. Laut Wissenschaftlern kann der Zentralprozessor verschiedene Arten von Aufgaben gut lösen, kann jedoch nicht mit einem Prozessor konkurrieren, der speziell für nur eine bestimmte Aufgabe entwickelt wurde.Dinesh Manocha, Professor an der Universität von North Carolina in Chapel HillFPGAs, der an einem Echtzeit-Bewegungsplaner für GPUs arbeitet, sind sich einig, dass FPGAs das Potenzial haben, die Effizienz der Bewegungsplanung zu steigern. Er ist zuversichtlich, dass die Entwicklung von Wissenschaftlern in naher Zukunft ihre praktische Anwendung finden wird: Roboter werden zunehmend unter neuen, unsicheren Bedingungen eingesetzt, die Rolle der Verkehrsplanung wird mit der Zeit nur noch zunehmen.Startup Realtime Robotics wird Technologiewissenschaftler kommerzialisieren. Im Rahmen dieses Projekts werden FPGAs durch spezielle integrierte Schaltkreise ( ASICs ) ersetzt, die mehr als 100.000 Kanten kombinieren können. Ein solches Upgrade ermöglicht es Robotern, in einer Vielzahl von Umgebungen zu arbeiten.Source: https://habr.com/ru/post/de400079/
All Articles