Aus irgendeinem Grund kennen nur wenige Menschen in Russland die reale Situation durch den Einsatz verschiedener Robotik am Notfallort des KKW Fukushima. Die breite Öffentlichkeit hat ein eindeutiges Stereotyp:

Tatsächlich wurden in verschiedenen Arbeiten während der Liquidation der Folgen des Unfalls im KKW Fukushima (ich werde wahrscheinlich mehr für die FAE schreiben) Hunderte von Einheiten verschiedener ferngesteuerter Roboter verwendet und werden verwendet. Der Umfang des Einsatzes ferngesteuerter Autos ist unvergleichlich größer als im Kernkraftwerk Tschernobyl, aus all den einfachen Gründen, die sich in den letzten 30 Jahren enorm entwickelt haben, und weil der Unfall im Kernkraftwerk Tschernobyl weiter verbreitet ist als im Kernkraftwerk Tschernobyl.
 Roboterstaubsauger, japanische Version für Fukushima.
Roboterstaubsauger, japanische Version für Fukushima.Bevor wir uns die Roboter ansehen, sollten wir uns zumindest allgemein vorstellen, dass die Arbeiten in den letzten 6 Jahren seit dem Unfall bei der FAES durchgeführt wurden.
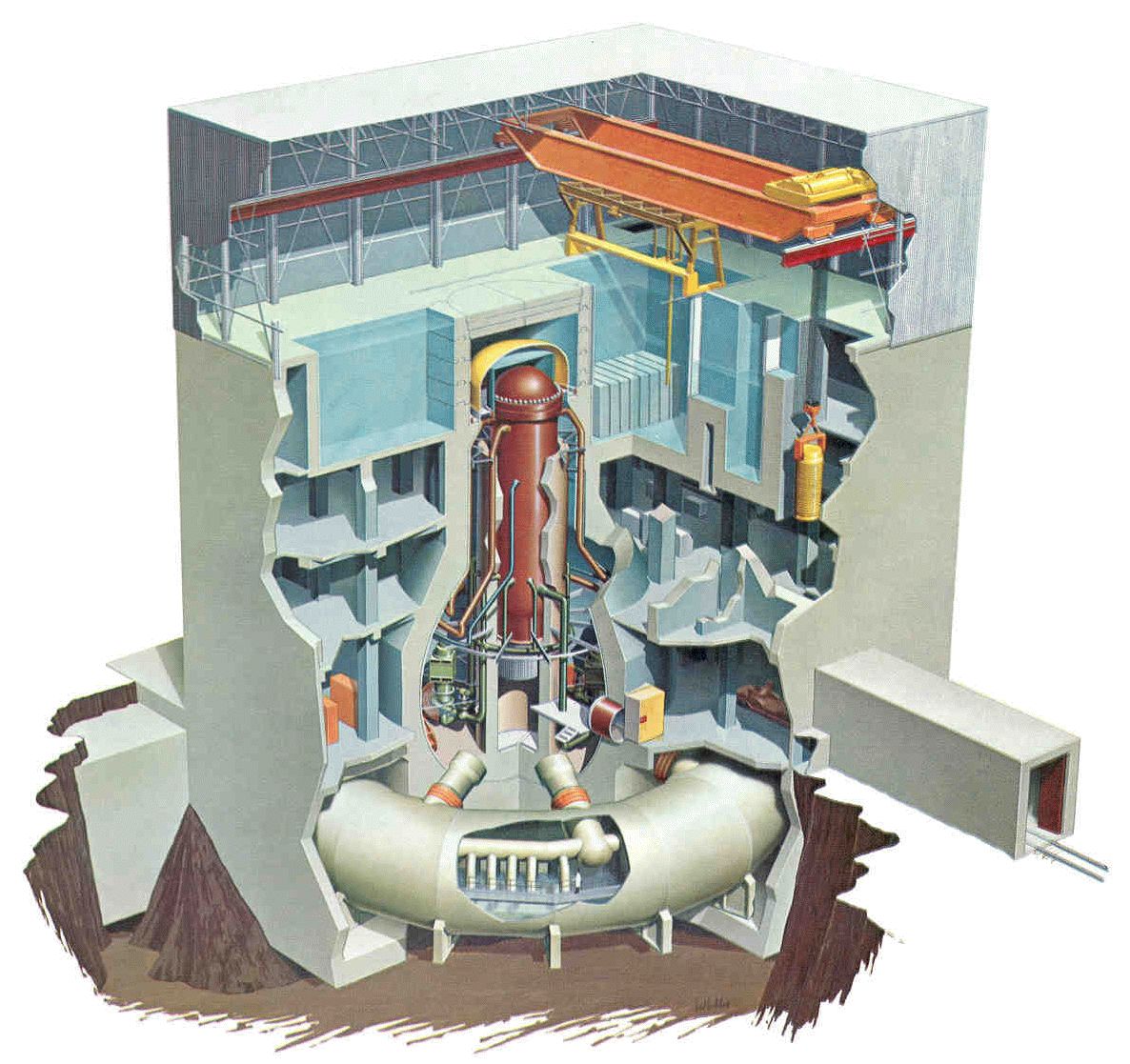 Dieses vereinfachte Bild gibt einen allgemeinen Überblick über die Gestaltung der Blöcke des KKW Fukushima: Der Reaktor hier in der Mitte (braun) befindet sich in der Mitte eines birnenförmigen Betonbehälters, in dem sich viele Geräte befinden. Oben rechts im Reaktor befindet sich ein Haltebecken, direkt unter dem Reaktor befindet sich ein Raum für Aktuatoren von Steuer- und Schutzstäben (im Gegensatz zu PWR werden sie im SWR von unten in das AZ eingeführt). Unter und um den Reaktor befindet sich ein torusförmiges Bubbler-Becken, das im Falle eines größeren Bruchs des Hauptreaktorbehälters Dampf kondensieren soll.
Dieses vereinfachte Bild gibt einen allgemeinen Überblick über die Gestaltung der Blöcke des KKW Fukushima: Der Reaktor hier in der Mitte (braun) befindet sich in der Mitte eines birnenförmigen Betonbehälters, in dem sich viele Geräte befinden. Oben rechts im Reaktor befindet sich ein Haltebecken, direkt unter dem Reaktor befindet sich ein Raum für Aktuatoren von Steuer- und Schutzstäben (im Gegensatz zu PWR werden sie im SWR von unten in das AZ eingeführt). Unter und um den Reaktor befindet sich ein torusförmiges Bubbler-Becken, das im Falle eines größeren Bruchs des Hauptreaktorbehälters Dampf kondensieren soll.Nachdem die Reaktoren der Blöcke 1, 2, 3 nach 11 Jahren in den Zustand „Kaltabschaltung“ gebracht wurden (dh der abgebrannte Brennstoff im Reaktor auf 100 ° C und darunter abgekühlt wurde), wurden die folgenden Aufgaben
formuliert :
- Aufklärung der Strahlungssituation an schwer zugänglichen Stellen - Reaktorbehälter, Container, Torre Bubbler und andere, wo die Situation bis Ende 2011 noch nicht bekannt war (vor allem mit den Resten des geschmolzenen Brennstoffs)
- Reduzierung des Abflusses von Radioaktivität aus Wind und Wasser aus Reaktoren - durch Beseitigung von Lecks (einschließlich der berüchtigten Eiswand), Verkleidung eines Teils der Gebäudewände und Sammeln von kontaminiertem Müll in Behältern, in denen dies noch nicht geschehen ist
- Vorbereitung der Standorte für das Entladen von SNF aus den Lagerpools aller 4 Blöcke - Reinigung zerstörter Strukturen, Kartierung von Trümmern in den Lagerpools und deren Reinigung, Organisation temporärer Strukturen über den Pools und schließlich - Entladen von SNF in Container
- Maximale Dekontamination von Einrichtungen (dh Reinigung von Oberflächenverunreinigungen. Dies ist hauptsächlich im Interesse der SNF-Entfernungsarbeiten erforderlich, um die Dosis des Personals zu verringern, das diese Arbeiten durchführen wird
- Versiegelung von Reaktorbehältern und anschließendes Pumpen von radioaktivem Wasser aus Gebäuden von Kraftwerken
- Demontage hochradioaktiver Schmelzbrennstoffrückstände (Corium) in 1,2,3 Blöcken
- Nach der Befreiung der Blöcke von nuklearen und strahlungsgefährdenden Objekten - Demontage und Organisation der „Grünfläche“
 Infografiken ab Block zu Beginn des Jahres 2016.
Infografiken ab Block zu Beginn des Jahres 2016.Der gesamte Plan soll in 30 bis 40 Jahren umgesetzt werden. Am schwierigsten ist es hier, abgebrannte Brennelemente aus den mit Trümmern übersäten Lagerbecken zu entladen und Korium aus den Überresten der Reaktorbehälter zu entfernen. Im Moment wird SNF vollständig aus Block 4 entladen (wo es sich glücklicherweise nicht im Reaktor befand, sondern nur im Haltebecken - das heißt, Block 4 kann früh genug in einen grünen Rasen verwandelt werden), und der Bau einer Schutzhülle zum Entladen endet SNF aus Block 3, es ist geplant, es im Jahr 2017 zu starten.
Mit den Blöcken 1, 2 ist die Situation am schwierigsten - für den Bau eines Schutzraums für die SNF-Reinigung ist es zunächst erforderlich, die Trümmer zu zerlegen und teilweise zu dekontaminieren, um die Felder zu reduzieren, was TEPCO (der Eigentümer des Kernkraftwerks) jetzt tut.
 Gesamtansicht des Standorts des KKW Fukushima im Jahr 2016. Übrigens gibt es einen guten Plan , der all diese Panzer und einige Gebäude erklärt.
Gesamtansicht des Standorts des KKW Fukushima im Jahr 2016. Übrigens gibt es einen guten Plan , der all diese Panzer und einige Gebäude erklärt.Roboter beteiligen sich also an absolut allen oben beschriebenen Arbeiten. Ja, natürlich sind dies alles ferngesteuerte Maschinen, hauptsächlich Kabelmaschinen. Ich werde hier nicht auf die terminologische Debatte eingehen, solche Geräte als Roboter oder nur als autonom betrachten und sie Roboter nennen.
 Der iRobot Packbot 510 ist der erste, der auf der FAES verwendet wird.
Der iRobot Packbot 510 ist der erste, der auf der FAES verwendet wird.Von den ersten Tagen des Unfalls an, die noch aktiv waren, stellte sich die Frage nach der Strahlenintelligenz. TEPCO verfügte über eine iRobot Packbot-Roboterflotte - eine Großmaschine, die für solche Zwecke recht praktisch ist. Sie setzen Dosimeter auf Pakbots (dies scheint im Allgemeinen eine der Standardoptionen zu sein), Gammakameras, Druck-, Temperatur- und Feuchtigkeitssensoren und schickten sie zu und um die durch die Explosionen zerstörten Blöcke. Leider war alles schlecht mit den Pakbots, als sie sich über die Treppe bewegten, und sie führten Aufklärung im Erdgeschoss und außerhalb der Blöcke durch.
April-Training am Standort des FNPP mit dem iRobot-Kriegerroboter.Nach einiger Zeit kamen mehrere Roboter (mit ähnlichem Design) hinzu, die vom FuRO-Zentrum und der Chiba-Universität entwickelt wurden - Quitte, Hibiskus, Sakura usw., so Entwickler, die über die beste Intelligenz / Mechanik verfügen, wenn sie sich in schwierigem Gelände bewegen. Tatsächlich erlaubten diese Roboter bereits von April bis Mai 2011, die oberen Stockwerke der Blöcke zu erkunden, zwei davon gingen aufgrund von Kabelbrüchen verloren.
Quitte zur Aufklärung in der zweiten Einheit des KKW Fukushima, April-Juli 2011.Darüber hinaus wurde mindestens eine vom japanischen Militär bereitgestellte Honeywell T-HAWK-Drohne zur Luftaufklärung und -überwachung eingesetzt. Das Militär und einige andere Talon-ähnliche Raupenroboter waren ebenfalls großzügig. Dies ist eine schwerere und sicherere Version in der Packbot-Ideologie.

Neben der Aufklärung zur Beseitigung der Trümmer begann in den ersten Wochen fast augenblicklich der Einsatz erneuerter ferngesteuerter Baumaschinen - mehrere Bagger, Bulldozer und Lastwagen, die die Passagen zwischen den Blöcken erfolgreich von radioaktiven Abfällen befreiten.
 Roboter zur Reinigung radioaktiver Abfälle in Block 3 von Mai bis Juni 2011. Einschließlich zwei traditionelle für die Atomindustrie Brokk'a
Roboter zur Reinigung radioaktiver Abfälle in Block 3 von Mai bis Juni 2011. Einschließlich zwei traditionelle für die Atomindustrie Brokk'aFür Putzmeister Roboter-Betonpumpen wurde eine interessante Anwendung gefunden - Wasser über die Blöcke gießen und die Situation von einem 70-Meter-Ausleger aus beobachten. Die Verwaltung solcher Maschinen erfolgte drahtlos von bleischützten mobilen Räumen aus, die in der Nähe des Arbeitsplatzes installiert wurden.
 Ferngesteuerter Putzmeister mit 62-Meter-Ausleger, Anfang April 2011, Aufgabe ist Aufklärung und Wasserversorgung bis zur Spitze des zerstörten Blocks.
Ferngesteuerter Putzmeister mit 62-Meter-Ausleger, Anfang April 2011, Aufgabe ist Aufklärung und Wasserversorgung bis zur Spitze des zerstörten Blocks.Ich denke, dass das sofortige Erscheinen solcher Geräte auf dem Gelände des FNPP auf der Tatsache beruht, dass es in den letzten 10 Jahren populär geworden ist, die Möglichkeit einer externen Steuerung von der Fernbedienung auf Baumaschinen, d. H. im Wesentlichen vollständig elektronische Steuerung im Inneren, die bereits leicht auf mindestens eine andere Hemisphäre der Erde zu bringen ist. Mit einer solchen Technik reicht es aus, sie mit Kameras aufzuhängen und mit dem richtigen Telekommunikationskanal auszustatten, und ein ferngesteuerter Roboter ist bereit. Leider war es 1986 notwendig, uns selbst zu quälen, um ein solches Ergebnis zu erzielen, und tatsächlich wurde das Problem nicht gelöst - die Geschwindigkeit bei der Beseitigung der Folgen des Unfalls erwies sich als wichtiger als die Dosisbelastung der Menschen.

Schließlich wird seit 2011 auch die strahlenresistente Ferntechnologie, die für die Nuklearindustrie Standard ist, am FAES-Standort eingesetzt: schwere (mehr als eine Tonne!) BROKK-Roboter und Walischmiller-Manipulatoren für mobile Wagen - im Grunde genommen wieder beim Abbau radioaktiver Abfälle, die am heißesten arbeiten Punkte.
Seltsamerweise hatten alle diese Geräte keine spezifischen Probleme im Zusammenhang mit Strahlung - na ja, oder sie waren irgendwie vertuscht (was zweifelhaft ist). Ungeschützte Robotik wurde jedoch in niedrigen Feldern eingesetzt (nicht mehr als 15 Röntgenstrahlen pro Stunde), und unter schwierigeren Bedingungen wurde manchmal ein Bleischutz an der Elektronik angebracht (z. B. 3 ferngesteuerte Putzmeister-Betonpumpen, die in der Nähe der durch Explosionen zerstörten Blöcke standen und Wasser von oben gossen).
 Die Strahlungssituation am 23.03.2011 - eine Woche nach dem Ende der aktiven Unfallphase. Die größte Zahl von 130 mSv beträgt 13 U / h, verglichen mit ~ 1000 U / h am Standort Tschernobyl am 6. Mai.
Die Strahlungssituation am 23.03.2011 - eine Woche nach dem Ende der aktiven Unfallphase. Die größte Zahl von 130 mSv beträgt 13 U / h, verglichen mit ~ 1000 U / h am Standort Tschernobyl am 6. Mai.Ein wichtiger Punkt sollte hier jedoch beachtet werden. Serielle oder semi-serielle Geräte wurden nicht zum Reaktorbehälter oder zum Boden des Behälters geschickt, wo anschließend Felder bis zu 50.000 U / h gemessen wurden. Für solche und andere spezifische Aufgaben wie die Dekontamination großer Mengen, die Aufklärung unter Wasser, die Entfernung von Abfällen aus Lagerpools für abgebrannte Brennelemente haben japanische Unternehmen seit 2011 die Entwicklung einer Vielzahl von Mechanismen vorangetrieben, von denen viele erst heute in Betrieb genommen werden. Schauen wir sie uns an:
 Umfrageläufer und FRIGO-MA
Umfrageläufer und FRIGO-MABeginnen wir mit einer kompakteren Version von Pakbots Kinematik - TOPYs Survey Runner. Kein sehr interessanter Roboter kroch jedoch 2012 in die Keller von Blöcken. Eine noch kleinere Version dieses Schemas namens FRIGO-MA sowie ein seltsamer vierbeiniger Roboter von Toshiba, der eine separate flache Aufklärung durchführen konnte, wurden verwendet, um Leckagen aus den Rohrleitungen der Reaktorleitungen zu kontrollieren (für Liquidatoren war die Suche nach Stellen mit Kühlwasserlecks für eine Weile äußerst wichtig).
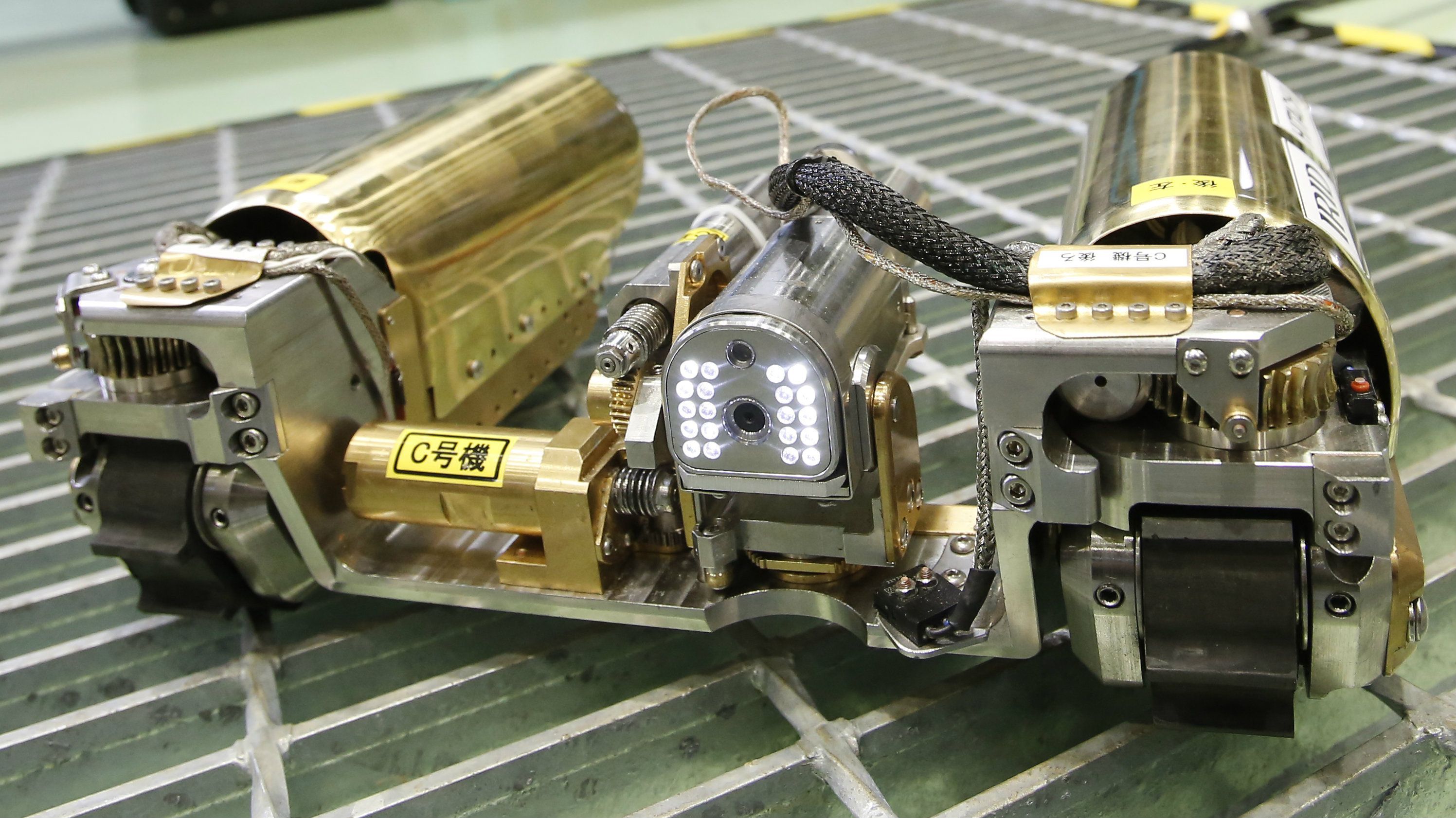
Scorpion, ein noch kleinerer und robusterer Scout, entwickelte Toshiba - und dieser Roboter stieß auf Bubbler und Containerreaktoren (und es scheint, dass einer der Skorpione der erste Roboter war, der von den Medien repliziert wurde).
Testen von „Scorpion“ im Layout von Inhaltsblock 2. Es ist interessant, dass viele verschiedene Modelle für den Versand von Robotern gebaut wurden, die viele Elemente der Kernkraftwerkskonstruktionen ziemlich zuverlässig reproduzierten.Übrigens zur Frage der kleinen Späher. Ich mochte das Foto dieses Roboters - raten Sie mal, was als Kamera verwendet wird

Der Rivale von Toshiba Scorpion war Hitachis Formwandler, ein ziemlich beeindruckendes Design mit interessanter Kinematik. Zwei Roboter dieser Version wurden in den unteren Teil des Containers geschickt, auf den Feldern mit ~ 500 U / h (5 Sv / h) aufgeklärt und dort Coriumspray gefunden.

Sie wurden zum Helden der letztjährigen Nachricht "TEPCO schickte Roboter in den Reaktor und sie starben an Strahlung" - tatsächlich blieb der erste Roboter einfach stecken, aber der zweite stieß wirklich auf ein Stück SNF mit einem Feld von 5000-8000 U / h und die Elektronik lehnte ab (Die Ironie des Schicksals hier ist, dass sich herausstellte, dass der Begriff „bewusst bleiben“ in einem Auto einer Person sehr ähnlich ist). Übrigens haben diese Roboter trotz des Todes eine ziemlich wichtige Sache herausgefunden - im Behälterbehälter von Einheit 1 befindet sich das Wasser auf einem ziemlich hohen Niveau, was bedeutet, dass es dicht ist.
Video von einem dieser Scouts gefilmt.Im Gegensatz zu einer Person haben Ingenieure jedoch die Möglichkeit, angesichts eines Problems zu versuchen, es zu lösen, indem sie eine neue Option erfinden. Jetzt testet Toshiba eine Version desselben kleinen Scorpio-Scouts, der mit einer Mikroverzweigung und einem Mikromesser zum Schieben von Coriumstücken ausgestattet ist. Im Allgemeinen nähern sich Neuwagen immer mehr dem unerforschten Hauptbereich - den Durchdringungsorten des Reaktorbehälters und des Containerkoriums - und kartieren die Position des Koriums unter dem Reaktor in den Blöcken 1, 2, 3.
Derzeit ist es TEPCO mit nicht entfernten Methoden nur gelungen, die strahlungsbeständige Kamera am Block Nr. 2 auf das Corium abzusenken und den DER mit 530 Sv / h (d. H. 53000 U / h) zu messen. Eine solche Dosisleistung lässt nicht hoffen, dass die Aufklärungs- / Kartierungsaufgabe einfach sein wird - die vorhandene, sogar strahlungsbeständige Elektronik wird unter solchen Bedingungen zu unzuverlässig, und es ist unmöglich, sie in einem kleinen Roboter abzuschirmen.
Übrigens wird im Rahmen von ITER in Europa eine Reihe strahlungsbeständiger Mikroschaltungen (ADCs, DACs, digitale Schnittstellen, Logik) für ungefähr solche Arbeitsbedingungen entwickelt. Ein weiteres Beispiel dafür, wie ein „wertloses“ Projekt konkrete Ergebnisse bringt.
Zum Abschluss des Aufklärungsthemas sollte erwähnt werden, dass TEPCO mehrere serielle autonome Unterwasserroboter und ein kleines ferngesteuertes Boot zur Aufklärung wassergefüllter Keller verwendete.
Die zweite Hauptaufgabe für die Armee der TEPCO-Roboter war und ist die Analyse von Blockaden, vor allem im Rahmen der SNF-Entfernung. Wie ich oben schrieb, verwendete die FAEC anfangs Standardprodukte von BROKK und Walischmiller für die Nuklearindustrie und ferngesteuerte Baumaschinen. Hitachi entwickelte jedoch schnell einen speziellen BROKK-ähnlichen ASTACO-SoRa-Roboter (d. H. Schwerer Kettenroboter mit autonomer Leistung von einem Verbrennungsmotor).
Unter dem Deckmantel von ASTACO-SoRa gibt es etwas aus den Bildern des japanischen Anime.Seine Aufgabe war es, Kabelabfälle abzubauen - ein komplexes Objekt für die Standard-Demontage von Roboterarmen, das häufig in Kernkraftwerken zu finden ist. Zusammen mit den speziellen ASTACO-SoRa und strahlungsbeständigen BROKKs wurden die Demontageroboter Husqvarna DXR-140, DX-250 und DX-310 eingesetzt. Wie, Sie wussten nicht, dass Husqvarna Zerstörer produziert?
 Annahme von Husqvarn im Jahr 2012 im Kernkraftwerk Fukushima.
Annahme von Husqvarn im Jahr 2012 im Kernkraftwerk Fukushima.Warum brauchten Sie solche Geräte? Ich möchte Sie daran erinnern, dass es im Rahmen des Hauptereignisses für heute, nämlich der Gewinnung abgebrannter Brennelemente aus den Speicherpools, erforderlich ist, die Trümmer um die Pools herum zu zerlegen, Schutzräume zu bauen und allgemein vorzubereiten. Und nicht überall, wo die Strahlungsumgebung dies zulässt, ist die weitgehende Verlagerung dieser Aufgaben auf die Demontage von Robotern verständlich, obwohl das Arbeitstempo ziemlich stark abnimmt.
 Auch bei dieser Aufgabe arbeiten telekontrollierte Baumaschinen zusammen mit allen Arten von ungeschickten und langsamen Robotern.
Auch bei dieser Aufgabe arbeiten telekontrollierte Baumaschinen zusammen mit allen Arten von ungeschickten und langsamen Robotern.Übrigens, über das Tempo, ein kleiner Exkurs. 1986 bewegten sich die Roboter noch langsamer, waren noch ungenauer und zuverlässiger, und jeder Tag der Verzögerung mit der SNF-Bestattung vom Dach des KKW-Kernkraftwerks Tschernobyl 4 führte zur zusätzlichen Entfernung von Radionukliden - durch Wind und Wasser. Aus diesem Grund kehrten die Liquidatoren des Unfalls von Tschernobyl zur Verwirklichung dieser Aufgabe durch die Menschen zurück, um die Reinigungsaufgaben mit Robotern zu erledigen und sicherzustellen, dass sie zu langsam sind. Die Langsamkeit und Unzuverlässigkeit der Robotik wurde zum Hauptgrund für ihren geringen Einsatz und nicht für Strahlung und „schreckliche Bedingungen“, wie die Entwickler dieser Roboter gerne sagen. Als Beweis werde ich ein Stück eines Dokumentationsvideos geben:
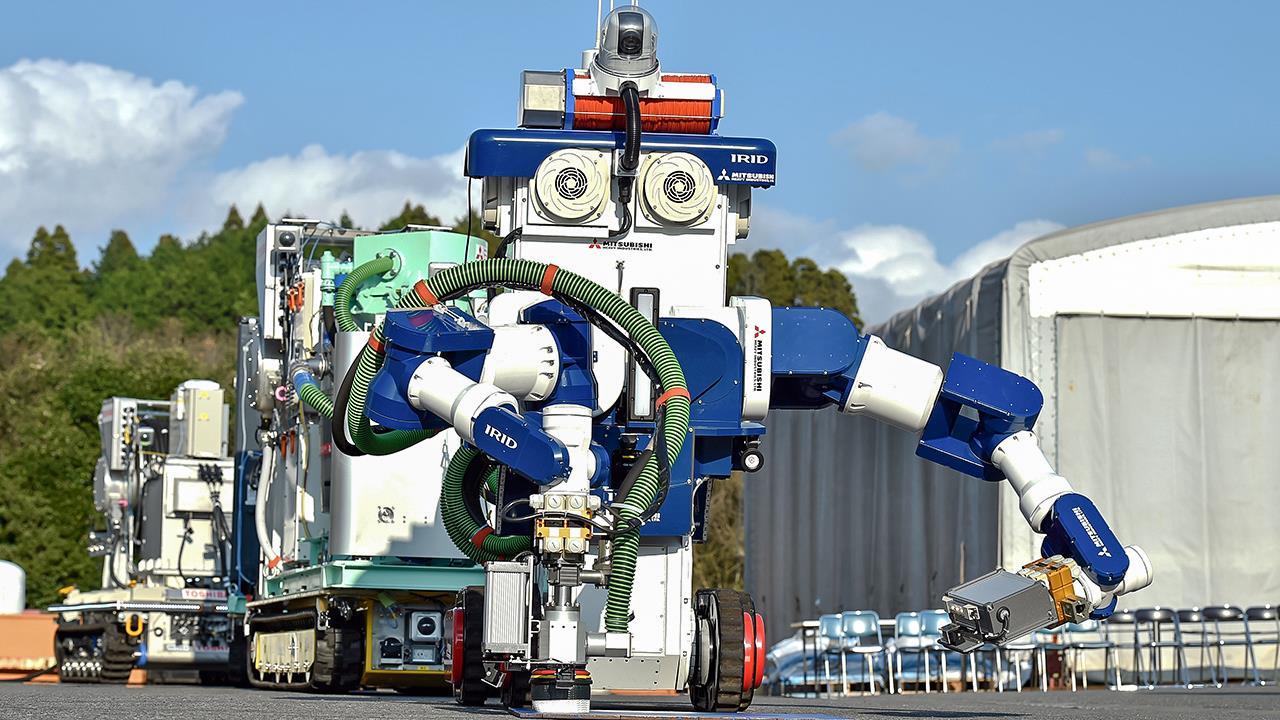
Aber zurück nach Fukushima. Neben dem Abbau der Trümmer und dem Transport fester radioaktiver Abfälle in Behälter auf kontaminierten Blöcken gab (und gibt) eine weitere unangenehme Aufgabe - die Dekontamination von Wänden, Böden, Decken usw. - alle Strukturelemente, die nicht einfach vom Ort zukünftiger Arbeiten entfernt werden können. Radionuklide, die während der aktiven Phase des Unfalls ausgeschüttet wurden, setzten sich auf diesen Oberflächen ab - irgendwo können sie abgewaschen werden und irgendwo müssen sie abgestreift werden. Eine gute Option ist das Eisstrahlen - Beschießen von Oberflächen mit Trockeneispartikeln (aus CO2), gefolgt von einem Absaugen des Filters von allem, was passiert ist. Das System selbst für eine solche Reinigung ist jedoch ziemlich umständlich - zunächst wurde versucht, es auf demselben Husqvarna DXR-140 mit einem Gewicht von 985 kg zu installieren, aber das Ergebnis war nicht sehr gut. Aber wir sind in Japan! Heimat fremder Roboter! Und das Ergebnis hat alle Erwartungen übertroffen.
Der Roboterzug besteht aus vier Wagen, von denen der erste mit einem Dekontaminationsmanipulator ausgestattet ist, während der Rest ein Trockeneis-Erzeugungssystem, einen Staubsauger, Filter, verschiedene Reinigungsflüssigkeiten usw. enthält.Im Allgemeinen wurden etwa ein Dutzend spezialisierter Mechanismen für die Dekontaminierungsaufgabe geschaffen, einschließlich am einfachsten den Boden zu reinigen und am seltsamsten die Decke zu reinigen. Gleichzeitig sind, soweit Sie verstehen können, die Ergebnisse nicht von Tests, sondern von echten Arbeiten an den Blöcken immer noch eher bescheiden und ähneln eher denselben Tests, nur in der realen Welt. Einschließlich des oben gezeigten Megarobo-Zuges wurde noch nicht in Blöcke gestartet (wie es scheint).
Dekontaminationstechnologie - ein Manipulator am Ende einer ferngesteuerten versenkbaren Leiter?
Ein weiteres Beispiel für eine seltsame Dekontaminationsmaschine.
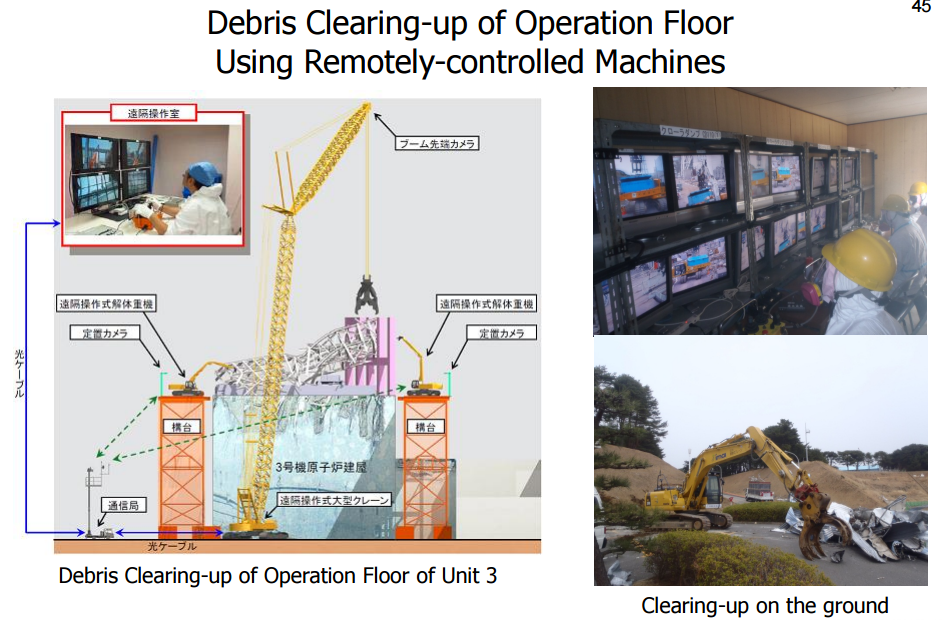
Schließlich ist die letzte wichtige Aufgabe, für die die Japaner ferngesteuerte Roboter entwickeln, das Löschen der Expositionspools. Diese Aufgabe ist am schwierigsten, weil Hier muss man sich neben instabilen Strukturen in schlammigem Wasser mit großen Strahlungsfeldern (insbesondere dem Aufnehmen von Müll aus den Regalen mit abgebrannten Brennelementen) und der Gefahr von Kettenreaktionsausbrüchen auseinandersetzen. Wenn Sie beispielsweise eine Brennelementanordnung auf eine andere fallen lassen, ist dies durchaus möglich.
Video aufgenommen von einem Unterwasserfahrzeug im Expositionspool des dritten Blocks. Unter diesem Müll befinden sich mehrere hundert Tonnen abgebrannter Brennelemente!Um dieses Problem zu lösen, wurde aus einem ferngesteuerten Unterwasserroboter mit zwei an einem Laufkran hängenden Manipulatoren und verschiedenen Hebevorrichtungen ein ziemlich großer Komplex erstellt. TEPCO plant, diesen Komplex bereits 2017 zu nutzen, wenn abgebrannte Brennelemente in der dritten Einheit geräumt werden, wo die Entladung des SNF 2018 beginnen soll.
Zusammenfassend möchte ich Folgendes beachten:
1. Die Auflösung der Folgen des Unfalls im KKW Fukushima ist zu einem Ort für den massiven Einsatz von ferngesteuerten Geräten geworden, vor allem bei Aufklärungs- und Kartierungsaufgaben.
2. Die vorhandenen Serienroboter können die Aufgaben der Liquidation selbst (und der Aufklärung an schwierigen Orten) nicht bewältigen. Zwei oder drei Jahre nach dem Unfall wurden viele neue Gerätevarianten entwickelt - es ist klar, dass derzeit nach Formularen gesucht wird, die erfolgreich und effektiv für die Arbeit unter den Bedingungen von Strahlenunfällen in Industrieanlagen sind. Insgesamt habe ich übrigens 43 Arten ferngesteuerter Autos gezählt, die in den Rahmen von TEPCO-Berichten fielen.
3. Die Arbeit ferngesteuerter Maschinen ist viel langsamer als mit Hilfe von Menschen. , , : , ( ).
PS , - - — .