 Diese drei Roboter sind die Vorgänger von Astrobee. Sie haben einige Tests auf der ISS bestanden, aber sie haben keiner Person geholfen.
Diese drei Roboter sind die Vorgänger von Astrobee. Sie haben einige Tests auf der ISS bestanden, aber sie haben keiner Person geholfen.Die NASA setzt seit 2006 Roboter auf der Internationalen Raumstation ein. Seit mehr als 10 Jahren werden auf der ISS verschiedene Systeme getestet. Eines der ungewöhnlichsten Projekte hieß SPHERES (Synchronized Position Hold, Engage, Re-Orient, Experimental Satellites). Im Rahmen dieses Projekts testete die NASA ein Trio von Robotern, die mehr als 600 Stunden auf der Station verbrachten. Während dieser Zeit konnten Ingenieure und Wissenschaftler eine Vielzahl von Experimenten durchführen, einschließlich der Interaktion von Robotern im Standalone-Betrieb, in der Kartierung und in der Navigation. Gleichzeitig waren diese Roboter nicht dafür ausgelegt, praktische Arbeiten auszuführen, die Astronauten helfen könnten.
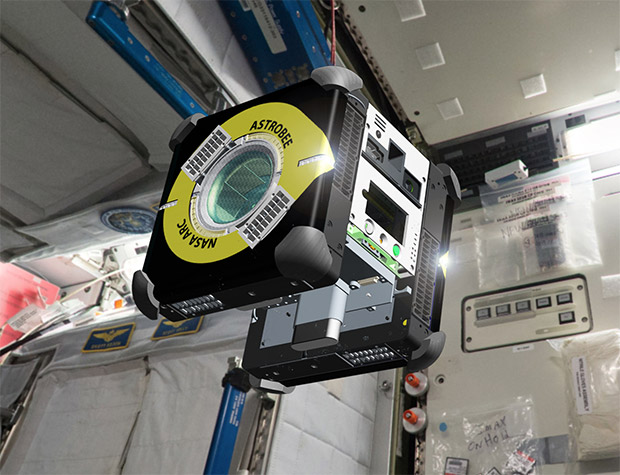
Jetzt ist die Zeit für eine neue Generation von Robotern gekommen, die bereits Menschen an Bord der ISS direkt unterstützen können. Ein solcher Roboter ist
Astrobee . Er kann an Routineaufgaben von Astronauten teilnehmen, einschließlich der Analyse der Luftqualität, der Bestimmung des Geräuschpegels und der Weiterleitung von Geräuschen von einer Station über ein Mikrofon und eine Kamera. Darüber hinaus ist der Roboter mit einem RFID-Scanner ausgestattet, mit dem er einige Werkzeuge verwenden kann, die mit einem kleinen Manipulator arbeiten.
Im Herbst zeigte die NASA in einem der
Forschungszentren der
NASA die Fähigkeiten ihres Roboters. Es sieht für seine Fähigkeiten nicht allzu beeindruckend aus. Tatsächlich ist der Roboter ein Würfel mit einer Gesichtslänge von 32 Zentimetern. Der Körper besteht aus elastischem Material. Im Inneren befindet sich ein reaktives Miniatursystem, mit dem sich der Roboter bewegen kann. Darüber hinaus befinden sich im Gehäuse eine Vielzahl von Sensoren, Steuerungssystemen, ein Touchscreen und mehrere zusätzliche freie Anschlüsse zum Hinzufügen verschiedener Hardware, einschließlich des oben genannten Manipulatorarms.
Um die Fähigkeiten des reaktiven Systems des Roboters zu testen, wurde Astrobee auf ein Dock gelegt, das einem Schlitten ähnelt. Diese Schlitten befinden sich wiederum auf einer der Seiten eines sehr glatten Granitwürfels. Mit einem komprimierten Kohlendioxidstrahl gleitet das System mühelos über die Oberfläche. Dank dessen können Entwickler die Navigations- und reaktiven Systeme testen und bei Bedarf verschiedene Elemente anpassen. Im Weltraum schwebt der Roboter ohne Schlitten in der Schwerelosigkeit und bewegt sich aufgrund des Strahlantriebs.
NASA-Entwickler behaupten, dass Astrobee nicht die nächste Generation von
SPHERE-Robotern ist . Tatsächlich handelt es sich um eine völlig neue Plattform, die von Grund auf neu zusammengebaut und für den autonomen Betrieb auf der ISS ausgelegt ist. Eine der auffälligsten Ergänzungen ist das Strahlantriebssystem. Es "startet" mit elektrischem Strom und der Roboter kann in seinem Dock aufgeladen werden. SPHERE-Roboter zum Beispiel wussten auch, wie man sich mit Jet-Bewegungen bewegt, aber sie waren auf die Ladung ihrer Batterien angewiesen. Wie oben erwähnt, wird der Roboter funktionaler, wenn er dem Design des Elements zusätzliche Elemente hinzufügt. Module können durch andere ersetzt werden, wobei bei Bedarf eine Funktion durch eine andere ersetzt wird.
Der Unterschied zwischen dem neuen Roboter und seinen Vorgängern kann als die Tatsache bezeichnet werden, dass SPHERES in seiner Bewegung vollständig von der verfügbaren "Ladung" von Kohlendioxid abhängig war. Es wurde angenommen, dass sie nicht nur innerhalb der Station, sondern auch außerhalb arbeiten können. Astrobee unterscheidet sich in diesem Sinne sehr von seinen "Kollegen". Es kann sich nur dann in der Schwerelosigkeit bewegen, wenn es sich in der Atmosphäre befindet. Der Roboter hat keine Kohlendioxidladung, daher nutzt sein reaktives System die Luft der Station. Das heißt, es kann sich nicht außerhalb der ISS bewegen.
Das Computersteuerungssystem des Roboters erfasst und wirft Luft entgegen der beabsichtigten Route. Astrobee kann sich in jede Richtung bewegen.
 Das Foto zeigt eines der Astrobee Jet-Antriebsmodule.
Das Foto zeigt eines der Astrobee Jet-Antriebsmodule.Hinter der Schutzwand einer der Würfelflächen befindet sich ein Ventilator, der Luft ansaugt. Es gibt andere ähnliche Elemente. Ihre Bewegung soll die Kreiselkräfte minimieren. Dieses System arbeitet
ständig und erzeugt eine Drucklufttasche im Inneren des Roboters. Luft, falls erforderlich, wird die Bewegung des Systems aus speziellen Düsen ausgestoßen. Sie befinden sich auf allen Seiten des Astrobee. Wenn die Düsen geschlossen sind, bewegt sich der Roboter nicht. Das Öffnen der Düse bedeutet das Ablassen von Druckluft und die Bewegung in die entgegengesetzte Richtung.
Insgesamt haben die Entwickler 12 Düsen bereitgestellt, die in einer speziellen Reihenfolge angeordnet sind. Wenn Sie nur eine Düse pro Zeiteinheit verwenden, bewegt sich der Würfel in Schwerelosigkeit zufällig. Es wird sehr schwierig sein, damit umzugehen. Wenn Sie jedoch sofort mit einem Düsenpaar arbeiten, bewegt sich der Würfel ausgeglichen.
Es ist klar, dass das Vorhandensein eines Systems, das sich mit einem Luftstrahl in einem geschlossenen Luftraum bewegt, die Entwicklung spezieller Sicherheitsmaßnahmen erfordert. Bei Bedarf kann jeder Astronaut den Würfel aufheben und an einen sicheren Ort bringen. Darüber hinaus ist der Roboterkörper mit weichem Material bedeckt, wodurch mögliche Schäden durch den Aufprall des Roboters auf zerbrechliche Elemente (Laptop-Display usw.) minimiert werden.
Die Bullaugen der Station müssen nicht fürchtet werden. Sie bestehen aus vier Glasschichten. Zwei Schichten sind haltbare Gläser, die von zwei weiteren Schichten einer anderen Glasart bedeckt sind. Jetzt muss die NASA beweisen, dass der Roboter unter keinen Umständen eine der Schichten durchbrechen kann.
Darüber hinaus sorgten die Entwickler bei der Erstellung von Astrobee für die vollständige Sicherheit. Mit anderen Worten, wenn die Systemsoftware „verrückt“ ist, sollte das gesamte System als Ganzes keinen kritischen Schaden an der Station verursachen. Beispielsweise kann ein Fehler in der Software dazu führen, dass der Roboter so weit wie möglich beschleunigt und in diesem Modus etwa 20 Meter passiert (maximale Entfernung in einer geraden Linie zur ISS). In diesem Fall müssen Sie sicherstellen, dass beim Auftreffen auf ein Element der Station (dasselbe Fenster) keine kritischen Schäden verursacht werden.
Zwischen den einzelnen Elementen des Strahlantriebssystems des Roboters befindet sich eine große Anzahl von Sensoren und anderen Geräten, die der Roboter für den autonomen Betrieb benötigt. Insbesondere kann er sich mit dem Warenverkehr befassen. Mehrere Flächen des Roboters sind für die Arbeit mit Lasten ausgelegt. Aufgrund des Vorhandenseins eines Objekterfassungssystems kann der Roboter es von einem Ende der Station zum anderen transportieren.
Das Computersystem des Roboters besteht aus drei Ebenen: niedrig, mittel und hoch. Die mittlere und die hohe Ebene sind nahezu identisch, außer dass die mittlere Ebene auf Linux basiert und für die meisten Funktionen des Roboters verantwortlich ist. Die obere Ebene basiert jedoch auf Android und ist dafür verantwortlich, mit Waren zu arbeiten und diese von Punkt zu Punkt zu übertragen. Diese Ebene ist laut den Entwicklern nicht zu kompliziert, sodass Sie Anwendungen für Android schreiben können, um die Funktionalität des Systems zu erweitern.
Bei den Sensoren verfügt die Astrobee über eine Hauptnavigationskamera mit einem Sichtfeld von 116 °. Darüber hinaus sorgten die Entwickler für das Vorhandensein einer HD-Kamera mit Autofokus, die Informationen von der ISS in Echtzeit zur Erde übertragen kann. Mit der CamBoard Pico Flexx-Kamera kann das Gerät Hindernisse aus einer Entfernung von 4 Metern erkennen. Ein weiterer optischer Detektor bestimmt die Geschwindigkeit des Geräts. Wenn die Drehzahl zu hoch ist, werden mehrere Motoren abgestellt, um sie zu reduzieren.
Einer der Vorteile von Astrobee ist, dass sich der Roboter autonom auf der ISS bewegen kann (überall außer im russischen Segment). Dies ist eine bedeutende Leistung von Ingenieuren und Wissenschaftlern, da sich innerhalb der ISS ein segmentierter Raum befindet und die Navigation nach einem Roboter nicht so einfach ist. Es ist jedoch sehr rational organisiert, so dass der Roboter nicht zu stark „belastet“ werden muss, um durch die verschiedenen Fächer zu navigieren. Im Speicher des Roboters befindet sich eine Hauptkarte, so dass der Roboter anhand eines Rahmens der Umgebung verstehen kann, wo er sich befindet.
Die Interaktion mit Menschen während der Bewegung ist jedoch eine schwierigere Aufgabe. Menschen bewegen sich mehr oder weniger unvorhersehbar, und der Roboter sollte beim Bewegen nicht mit ihnen kollidieren. Bei der Arbeit an Astrobee wurde auch dieses Problem gelöst. Der autonome Modus des Roboters kann übrigens deaktiviert und ferngesteuert werden.
Für den Roboter wurde eine Dockingstation entwickelt, über die die Batterien des Geräts aufgeladen und Telemetriedaten erfasst werden können.
Wie oben erwähnt, wurde zur Durchführung einer Reihe von Operationen für den Roboter ein Manipulator erstellt, der auf einem 3D-Drucker gedruckt wurde. Die meiste Zeit befindet sich der Manipulator in einem gefalteten Zustand, kann sich jedoch bei Bedarf zersetzen. Mit der Kamera erkennt der Roboter zugängliche Objekte, die er bewegen kann. Auch mit Hilfe des Manipulators kann sich Astrobee im Raum der Station bewegen. In diesem Fall können Sie Batteriestrom sparen. Wenn Sie nur den Manipulator verwenden und das reaktive System ausschalten, wird der Energieverbrauch um 80% reduziert.
Die "Klaue" am Ende des Manipulators ist ziemlich zuverlässig - wenn der Roboter mit seiner Hilfe repariert hat, aber nicht brechen kann. Bei Bedarf kann der Astronaut den Roboter jedoch entfernen. Die Kompressionskraft ist speziell so hoch, dass eine Person auch einen festen Roboter problemlos aufnehmen kann, wenn etwas schief geht.
Warum wird es also benötigt?
Die Hauptaufgabe des Roboters besteht darin, Astronauten bei der Ausführung einer Reihe von Routineaufgaben zu unterstützen. Unabhängig davon, ob der Roboter offline funktioniert oder ferngesteuert wird, sollte er in der Lage sein, eine Person zu ersetzen. Installieren Sie beispielsweise einen Camcorder, beobachten Sie das Verhalten verschiedener Elemente in der Station, überwachen Sie den Betrieb der Station und überwachen Sie die Luftqualität. Insbesondere ist es äußerst wichtig, die Kohlendioxidkonzentration zu bestimmen. Diese Analyse wird oft durchgeführt, aber Astronauten mögen dieses monotone Verfahren wirklich nicht. Aber der Roboter kann die Person darin ersetzen und die Luft so oft wie nötig analysieren.
 Darstellung des Aussehens des endgültigen Prototyps des Roboters
Darstellung des Aussehens des endgültigen Prototyps des RobotersIn diesem Jahr wird der Roboter nicht auf der ISS arbeiten. Die NASA behauptet, ihre Station im Geschäftsjahr 2018 zu starten. Drei solcher Roboter werden gleichzeitig gesendet. Zwei werden die Hauptaufgaben ausführen, und die dritte dient als Ergänzung. Wenn einer der gesendeten Roboter ausfällt, kann er ersetzt werden.
Bevor diese Roboter auf der ISS eintreffen, werden ihre Vorgänger, SPHERES, bereits entfernt. In der Vergangenheit haben sich die Geräte gut gezeigt, und die von ihnen gesammelten Daten haben den Wissenschaftlern bei der Entwicklung eines Roboters der neuen Generation sehr geholfen. Ein Roboter kann die ISS-Teammitglieder erheblich entlasten, und drei dieser Roboter werden einige der geringfügigen, aber zeitaufwändigen Aufgaben der Astronauten vollständig beseitigen.