Als ich vor einiger Zeit im Internet über Artikel und Videos über Copter stolperte, dachte ich, dass es schwierig und nicht für jedermann zugänglich sei. Aber der Wunsch, Flugführer zu werden, war groß, und nachdem er die Masse des Materials zu diesem Thema studiert hatte, kam er zu dem Schluss, dass es nicht notwendig war, eine fertige Version für den Bau eines Quadrocopters zu kaufen, nämlich von Grund auf neu zu bauen. Jetzt möchte ich Ihnen meine Erfahrungen beim Bau eines Quadrocopters auf MultiWii SE v2.5 mitteilen. In dem Artikel werde ich versuchen, den gesamten Prozess des Baus eines Quadrocopters von Null bis zum ersten Flug zu einem absoluten Anfänger in diesem Thema, das er selbst vor einiger Zeit selbst war, detailliert zu beschreiben.
Eine kleine Theorie zum Quadcopterfliegen
Wir werden den Copter auf dem klassischen Rahmen der "X" -Form zusammenbauen. Die Verwaltung eines Hubschraubers ist nicht so einfach, wie es auf den ersten Blick erscheinen mag, er hat keine Vorder- und Rückseite wie bei ferngesteuerten Autos. Mit dem Befehl „Vorwärts“ fliegt der Quadrocopter nicht dorthin, wo der Pilot hinschaut, sondern dorthin, wo die Nase des Quadrocopters zeigt (auf dem Flugregler befindet sich ein entsprechender
Pfeil ). Dies ist eine große Gefahr für Anfänger, da Vom Boden aus kann es schwierig sein zu bestimmen, wo sich die Nase des Hubschraubers befindet. Wenn Sie ihn bauen, müssen Sie ihn beispielsweise irgendwie mit Strahlen einer anderen Farbe oder durch Platzieren von LEDs markieren. Steuern Sie den Copter, d.h. Um seine Ausrichtung im Raum zu bestimmen und einzustellen, werden wir Winkel neigen, rollen und gieren + klettern. Der Flug des Hubschraubers in die notwendige Richtung wird durch Ändern dieser drei Winkel erreicht. Um beispielsweise vorwärts zu fliegen, muss der Hubschrauber seine Nase zum Boden beugen (Neigung).
Gas geben, klettern
Querruder - Rolle, Querruder (Rolle)
Aufzug - Aufzug, Stellplatz (Stellplatz)
Ruder - Ruder, Gieren (Gieren)
Motoren:
LFW - vorne links, Drehung im Uhrzeigersinn
RFC - vorne rechts, Drehung gegen den Uhrzeigersinn
LBC - hinten links, Drehung gegen den Uhrzeigersinn
RBW - rechts hinten, Drehung im Uhrzeigersinn

Notwendige Komponenten:
Flugsteuerung CRIUS MultiWii SE v2.5
FTDI- Programmierer
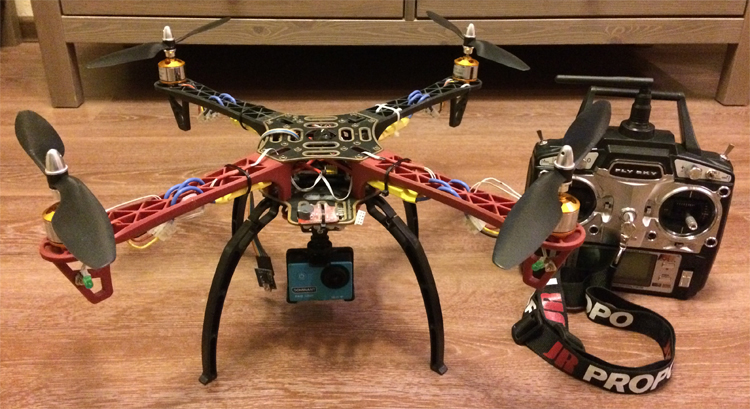
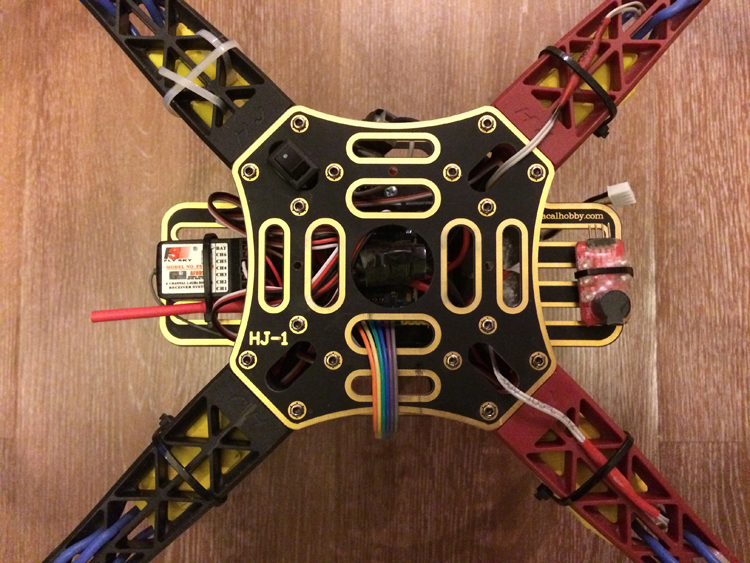
Rahmen HJ450
Motoren 2212-1000KV - 4 Stück
ESC 30A Geschwindigkeitsregler - 4St.
Batterie 11,1 V 2200 Mah 3S 40C Li-Po ( Beispiel )
Ladegerät B3 AC 2S-3S 7,4 V 11,1 V Li-Po- Batteriebalancer
T-Stecker-Batteriekabel
Kunststoffklammern
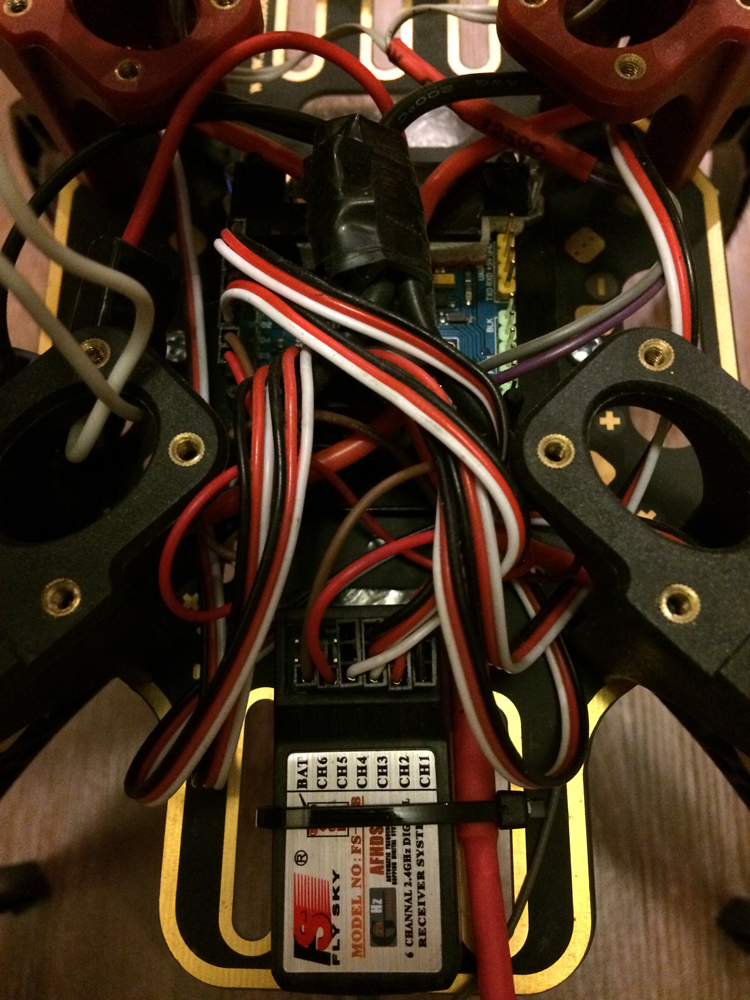
FlySky FS-T6 2.4G 6CH Steuergerät komplett mit Empfänger
Propeller 1045 (10x4,5) CW / CCW - 2 Stck. Drehung im Uhrzeigersinn + 2St. Drehung gegen den Uhrzeigersinn; nimm mehr Propeller, weil Während sie lernen, wie man einen Hubschrauber steuert, brechen sie einmal, wenn sie fallen
Optional:
Landebeine
Batterietester Li-Po Batteriespannungsanzeigetester Niederspannung (signalisiert, wenn die Batterie entladen ist)
Versammlungsschema:

Vor dem Zusammenbau müssen die ESC-Regler kalibriert werden. Der Vorgang ist wie folgt: Wir verbinden den Motor mit dem Regler, verbinden den Regler mit dem Gaskanal am Empfänger (CH3) und mit der Batterie, heben den Gasstab an der Steuereinrichtung bis zum Anschlag an, schalten den Appu ein - es wird ein charakteristisches Geräusch erzeugt, senken den Gasstab den ganzen Weg - es wird ein charakteristisches Geräusch erzeugt, dann testen wir - heben / senken den Gasstab - prüfen den Betrieb, schalten den Appu aus - der Regler ist kalibriert; Kalibrieren Sie mit dieser Analogie alle Regler (geeignetes
Video zur Verdeutlichung).
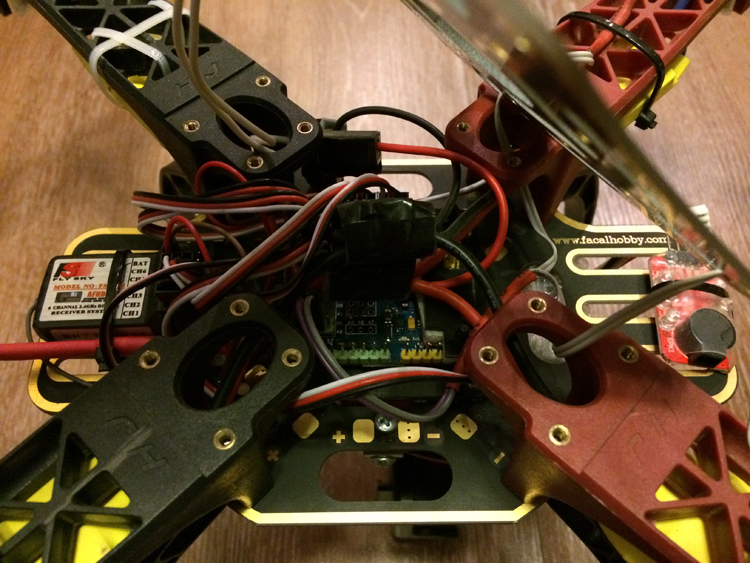
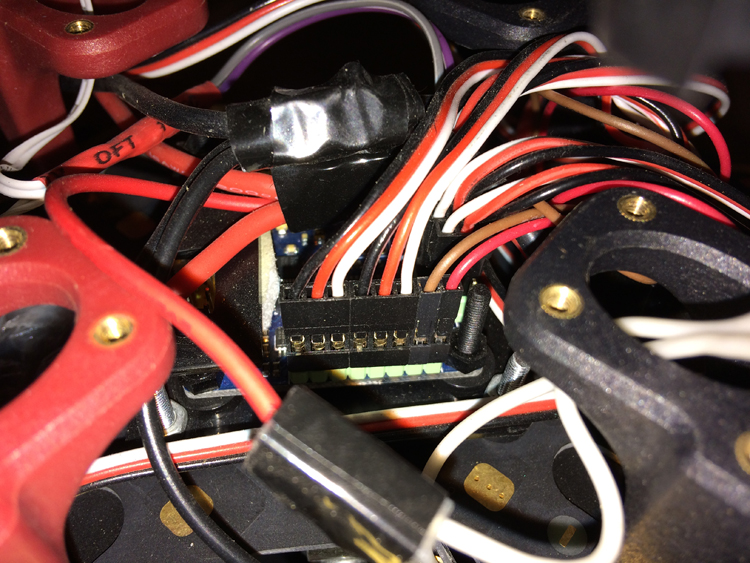
Wir montieren den Rahmen, installieren die MultiWii, montieren die Motoren, schließen die ESC-Steuerungen an: an die Motoren, an die MultiWii und an den Akku (wir verbinden die Vor- und Nachteile der Regler und verbinden sie mit den Batterien „+“ bzw. „-“). Achtung, um die Drehrichtung des Motors zu ändern, müssen Sie nur zwei beliebige Drähte von den drei vom Motor kommenden zum ESC austauschen. Es ist wünschenswert, MultiWii über die Plattform auf dem Rahmen zu installieren (ich habe es
selbst gemacht , aber Sie können es kaufen), um Kurzschlüsse am Gehäuse zu vermeiden und die Datengenauigkeit zu gewährleisten. Ich habe auch eine kleine "Kollektivfarm" für das Barometer angelegt - es mit Schaumgummi verschlossen, um den Fehler in den Daten zu reduzieren.
Zusätzliche Kanäle CH5 und CH6 können verwendet werden, um Funktionen zu aktivieren: Halten Sie die Höhe, kehren Sie nach Hause zurück, steuern Sie das Kamera-Gimbal usw. Weitere Informationen finden Sie in diesem
Artikel . Meine Dioden sind an A2 mit „+“ und „-“ verbunden. Der FTDI-Programmierer ist mit dem entsprechenden FTDI-Anschluss auf der Karte verbunden.






Nachdem wir alles zusammengestellt und verbunden haben, müssen Sie die Firmware in MultiWii ausfüllen. Dies müssen Sie über das Arduino IDE-Programm tun (Sie können die aktuelle Version
hier herunterladen). Wir verbinden MultiWii über den FTDI-Programmierer mit dem PC, starten die Arduino IDE, wählen den COM-Port, an den die Karte angeschlossen ist, im Menü aus, wählen auch den Kartentyp im Menü aus, öffnen die Firmware (Link am Ende des Artikels), öffnen die Datei MultiWii.ino, wie oben gezeigt Mehrere Registerkarten, wir werden nur an config.h interessiert sein, darin müssen wir die Firmware konfigurieren - abhängig von den notwendigen Einstellungen müssen Sie eine der Zeilen im gewünschten Abschnitt auskommentieren ("//" löschen) (Link zur Datei config.h mit meinen Einstellungen am Ende Artikel), füllen Sie nach dem Einrichten die Firmware in MultiWii aus.
Jetzt müssen wir den Copter über die GUI weiter konfigurieren. Dazu verwenden wir das Programm MultiWiiConf (Link am Ende des Artikels). Wir verbinden MultiWii über den FTDI-Programmierer mit dem PC, starten MultiWiiConf, wählen den COM-Anschluss, an den die Karte angeschlossen ist, im Menü aus, drücken die START-Taste (die Werte sollten in der Grafik angezeigt werden), bevor wir die Parameter bearbeiten - drücken Sie READ, um die Parameter zu speichern - drücken Sie WRITE. Nachdem Sie den Port ausgewählt und START gedrückt haben (Sie sehen, dass das Diagramm zum Leben erweckt wurde und die Daten eintreffen), müssen Sie die Sensoren kalibrieren: Um den Beschleunigungsmesser zu kalibrieren, stellen Sie den Copter parallel zum Horizont ein und drücken Sie die Taste CALIB_ACC. Die GUI friert eine Weile ein und stellen Sie dann sicher, dass die Achsen ROLL und PITCH parallel sind ;; Um das Magnetometer (Kompass) zu kalibrieren, drücken Sie die Taste CALIB_MAG und drehen Sie den Copter in alle Achsen oder platzieren Sie den Copter abwechselnd 30 Sekunden lang auf den Rippen. Nachdem Sie das Konfiguratorprogramm erfolgreich mit Ihrem Copter verbunden haben, sehen Sie oben rechts blaue Balken mit den Kanälen Ihrer Fernbedienung. Bewegen Sie die Sticks, um sicherzustellen, dass alles ordnungsgemäß funktioniert. Der Stick in der Min-Position sollte einen Wert von 1000 anzeigen, in der Mitte von 1500 und in Max 2000; Ist dies nicht der Fall, trimmen Sie die Fernbedienung gemäß den Anweisungen (Link am Ende des Artikels). Denken Sie daran, dass sich die Streifen entsprechend den Bewegungen der Sticks bewegen müssen, d. H. Wenn Sie den Gashebel nach oben heben, sollte der Streifen nach oben gehen (ähnlich wie bei anderen Kanälen). Wenn dies nicht der Fall ist, kehren Sie die Kanäle Ihrer Fernbedienung um. Auch in der GUI können Sie die hinzuzufügenden Funktionen festlegen. Kanäle wie Höhenretention (BARO). Die Funktion zur horizontalen Ausrichtung (LEVEL) muss immer aktiviert sein! Hier ist ein geeignetes
Video zur Veranschaulichung der Funktionsweise des MultiWiiConf-Programms.
Ein paar Abschweifungen zum Thema
Erwarten Sie nicht, dass die Funktion die Höhe (BARO) des harten Schwebens an einem Punkt hält, wie z Hierfür wird ein Barometer verwendet - der Hubschrauber wird sicherlich versuchen, die Höhe beizubehalten, in der Sie die Funktion aktiviert haben, aber er schwimmt in einem Radius von ± ein paar Metern, nur um die Genauigkeit der Daten vom Barometer zu gewährleisten und um sie vor äußeren Einflüssen zu schützen, habe ich eine „Kollektivfarm“ mit Schaumgummi eingerichtet. Denken Sie daran, dass die Höhenerhaltung für das Schwebegas aktiviert werden muss, d. H. Wenn Sie dann den Gasstab verwenden, um sicherzustellen, dass der Copter ± auf derselben Höhe gehalten wird und es nicht ratsam ist, das Gas nach Aktivierung der Funktion zu berühren. Für ein genaueres Schweben an einem Punkt ist es besser, das optionale GPS-Modul zu verwenden.
Die Course Hold-Funktion (MAG) ist sehr launisch und ihre Verwendung für mich endete bedauerlicherweise. Nach Aktivierung und Start begann sich der Copter wie ein Kreisel zu drehen und flog schnell von mir weg. Versuche, die Nase des Copters zu bestimmen und ihn zum Kurs zurückzukehren, waren erfolglos. Ich hatte keine Wahl wie man Gas wirft und zu einem Punkt rennt, der vom Himmel fällt. Hier ist ein kurzes
Video und
Foto nach dem Herbst. Möglicherweise wurde dieses Verhalten durch einen ungenau kalibrierten Kompass oder magnetische Interferenzen oder etwas anderes verursacht. Lesen Sie im Allgemeinen vor der Verwendung die Informationen im Internet und seien Sie vorsichtig.
Für die Zukunft kann es nützlich sein, auf Flügen keinen Laptop mit dem Programm MultiWiiConf bei sich zu haben. Sie können das HC-05-Bluetooth-Modul mit dem MultiWii-Controller (Verbindung zum UART-Anschluss) und über Android-Anwendungen (
MultiWii-Konfiguration und
EZ-GUI-Bodenstation ) verbinden. über Bluetooth stellt eine Verbindung zum Copter her und nimmt die erforderlichen Einstellungen vor, ähnlich wie in MultiWiiConf.
Das Verfahren zum Starten der Motoren ist wie folgt: Schalten Sie den Copter ein (quietscht), schalten Sie die App ein, nehmen Sie den Gasstab von der unteren Position nach rechts - die Motoren starten (speisen) und drehen sich im Leerlauf, um jetzt reibungslos Gas abzulassen. Um die Motoren zu stoppen, nehmen Sie den Gashebel von der unteren Position nach links - die Motoren haben angehalten, schalten Sie den Copter aus und die App aus.
Das ist alles, ich hoffe, mein Artikel wird Ihnen nützlich sein, aber jetzt können Sie Propeller installieren und in unserem Fall viel Glück und weniger Stürze weiterleiten.
Ein kurzes Video meiner Flüge
Download-Links:
Archiv - MultiWii-Firmware + MultiWiiConf-Programm
Config.h
Datei mit meinen Einstellungen
Handbuch für FlySky FS-T6
PS - Fortsetzung hier:
„Installation von FPV und Telemetrie auf einem Quadrocopter“