Ein offenes Projekt eines Elektromotor-Steuermoduls. Starten Sie
 Der Hauptzweck des Moduls ist die Steuerung von bürstenlosen Synchronmotoren (BLDC, BLAC, PMSM ...) mit trapezförmiger oder sinusförmiger Spannungsform, mit Drehzahl-Positionssensoren oder ohne Sensoren . Darüber hinaus hat das Modul kleine Abmessungen, einen ziemlich breiten Bereich von Versorgungsspannungen, eine Vielzahl von Debugging-Kanälen sowie drahtgebundene und drahtlose Kommunikation.Die Leistung der vom Modul gesteuerten Motoren kann innerhalb weniger hundert Watt und eine Spannung von bis zu 30 V liegen. Hierbei handelt es sich um Motoren mit verschiedenen Mechanismen und Geräten, z. B.: 3D-Drucker, automatische Türen, automatische Verschlüsse, eigenständige Pumpen, Lüfter, Schlösser, Elektrowerkzeuge, Stabilisatoren, Motoren und Servomechanismen von RC-Modellen, Robotern usw.Dies ist jedoch nicht auf die Verwendung des Moduls beschränkt. Es kann mit geringfügigen Ergänzungen zur Steuerung von Magneten, Schrittmotoren, zur Steuerung der Beleuchtung, als leistungsstarkes Ladegerät, als Spannungsregler, als leistungsstarke Audiosignalquelle, als Hochverstärkerschalter mit Strommesser und einfach als Debugging-Plattform verwendet werden.Kurz gesagt, ein solches Modul im Haushalt eines Ingenieurs kann sehr nützlich sein.All diese Eigenschaften des Moduls werden dank der klassischen 3-Phasen-Halbbrückenschaltung mit Strom- und Spannungssensoren und einem leistungsstarken Mikrocontroller erzielt.
Der Hauptzweck des Moduls ist die Steuerung von bürstenlosen Synchronmotoren (BLDC, BLAC, PMSM ...) mit trapezförmiger oder sinusförmiger Spannungsform, mit Drehzahl-Positionssensoren oder ohne Sensoren . Darüber hinaus hat das Modul kleine Abmessungen, einen ziemlich breiten Bereich von Versorgungsspannungen, eine Vielzahl von Debugging-Kanälen sowie drahtgebundene und drahtlose Kommunikation.Die Leistung der vom Modul gesteuerten Motoren kann innerhalb weniger hundert Watt und eine Spannung von bis zu 30 V liegen. Hierbei handelt es sich um Motoren mit verschiedenen Mechanismen und Geräten, z. B.: 3D-Drucker, automatische Türen, automatische Verschlüsse, eigenständige Pumpen, Lüfter, Schlösser, Elektrowerkzeuge, Stabilisatoren, Motoren und Servomechanismen von RC-Modellen, Robotern usw.Dies ist jedoch nicht auf die Verwendung des Moduls beschränkt. Es kann mit geringfügigen Ergänzungen zur Steuerung von Magneten, Schrittmotoren, zur Steuerung der Beleuchtung, als leistungsstarkes Ladegerät, als Spannungsregler, als leistungsstarke Audiosignalquelle, als Hochverstärkerschalter mit Strommesser und einfach als Debugging-Plattform verwendet werden.Kurz gesagt, ein solches Modul im Haushalt eines Ingenieurs kann sehr nützlich sein.All diese Eigenschaften des Moduls werden dank der klassischen 3-Phasen-Halbbrückenschaltung mit Strom- und Spannungssensoren und einem leistungsstarken Mikrocontroller erzielt.
(Zum Vergrößern anklicken)Um die Entwicklung des Stromkreises zu beschleunigen, wurde eines der typischen Projekte von TI als Grundlage herangezogen.Ich habe mich für das Design der TIDA-00901-Karte entschieden .(Zum Vergrößern anklicken) DiePlatine hat gute Eigenschaften: Strom bis 20 A, Motorleistung bis 200 W, Nennspannung 12 V. Entwickelt für den Betrieb in einem Auto.Als Treiber für Netzschlüssel wird der DRV8305- Chip verwendet . Einige Suchanfragen haben zu dem Schluss geführt, dass dies einer der besten Treiberchips für solche Anwendungen ist.Ein sehr nützliches Entwicklungsdokument ist das BLDC-Motorantriebsreferenzdesign für 12 V 200 W (20 A) für Kraftfahrzeuge .Die Platine hat eine bestimmte runde Form, der C2000 LaunchPad-Controller wird als Steuerelement verwendet. Leider ist die Software in Bezug auf Motorsteuerungsbibliotheken nicht vollständig geöffnet. Das C2000 LaunchPad basiert auf der DSP-Prozessorfamilie F2802x Piccolo. Diese Prozessorfamilie ist auf die Entwicklung einfacher Energiewandler spezialisiert und unterscheidet sich nicht durch große Universalität und Ressourcen.Modularchitektur.
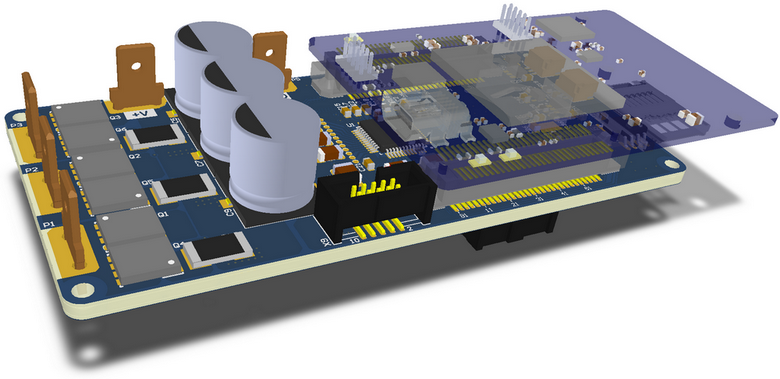
In diesem Projekt wurde beschlossen, das Modul in Form einer Verbundstruktur aus 2 Platinen auszuführen. Die Hauptplatine enthält einen Leistungstreiber, ein Leistungssubsystem und einige Peripheriefunktionen. Die Prozessorkarte ist auf der Hauptplatine installiert. Als Prozessor wurde die K66BLEZ1-Projektplatine (weitere Artikel zu diesem Projekt - 1 , 2 , 3 , 4 ) mit einem Mikrocontroller der NXP Kinetis- Familie auf Basis des ARM Cortex-M4- Kerns ausgewählt . ( 180 MHz, 2 MB Flash-Speicher, 256 KB RAM + Micro-SD-Karte, Echtzeituhr mit eigener Stromversorgung, USB-Gerät / Host-Hochgeschwindigkeit, separater Bluetooth LE 4 / ZigBee-Chip ) (Zum Vergrößern anklicken)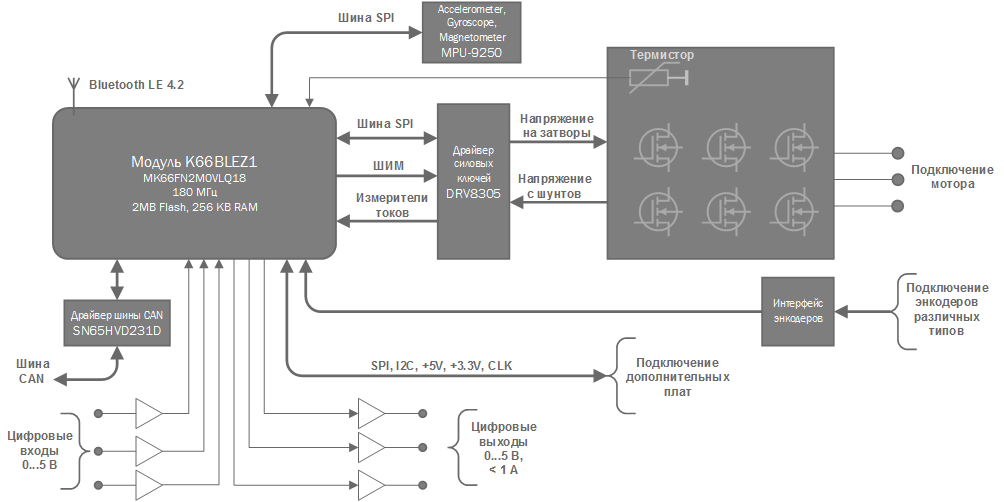
Das Modul führt einen Spannungsbereich von 8,5 bis 30 . Mehrere Temperatursensoren - im Mikrocontroller, in der Nähe von Netzschaltern und einem externen - schützen das Modul und den Motor vor gefährlicher Überhitzung. Die gesamte Elementbasis wird für den Betrieb bei Temperaturen bis zu -40 Grad ausgewählt. Mit .Die Strommotor - Steuertasten für entworfen den Impulsstrom bis 200 Ampere . Die Strommessung erfolgt durch Widerstands-Shunts mit einem Widerstand von 0,001 Ohm. Mit einem in der Chip - Treiber DRV8305 einstellbare Verstärkermodul der Lage der Ströme von 300 A bis 0,1 A und die Messung .Der CAN-Bus ermöglicht die Integration vieler solcher Module in ein gemeinsames synchronisiertes Netzwerk.Chip MPU-9250Nützlich, wenn die Steuerung der Modulausrichtung im Raum und die Trägheitsnavigation sowie die Überwachung von Vibrationen und Stößen erforderlich sind.Einbaumodul DC-DC - Wandler mit einer Ausgangsspannung von 5 V für die ausgelegt ist , bis zu 3,5 A Strom . Das Modul selbst verbraucht von diesem Wandler nicht mehr als 150 mA, der Rest der Stromversorgung kann über Stecker X4 an eine externe Last abgegeben werden. Der X4-Anschluss eignet sich zum Anschließen von Beleuchtungs- und Anzeigeelementen wie RGB-LED-Streifen auf Basis von WS2812B- Chips und ähnlichem. Der Prozessor unterstützt die Bildung eines Bitcodierungsprotokolls an den digitalen Ausgängen des WS2812B- Formatssowie PPM-, PCM- und PWM-Codierung. In ähnlicher Weise kann das Modul PPM- und PCM-Signale ohne Schwierigkeiten mit minimaler Prozessorlast empfangen.Berechnung der maximalen Schaltfrequenz und Begründung für die Auswahl der Leistungstransistoren
Wir überprüfen die im Dokument von TI vorgeschlagene Transistorvergleichstabelle erneut . Alle Parameter werden aus Datenblättern neu geschrieben.
(Zum Vergrößern anklicken)Hier habe ich mich wie TI-Spezialisten für CSD1854Q5B entschieden. In Bezug auf den maximalen Strom ist dies die beste Wahl. Und die Schaltfrequenz von 122 kHz geht weit über die vernünftige Grenze hinaus, die mit der Steuerung durch die Kinetis-Familie erreicht werden kann.Berechnung der maximalen Stromwelligkeit und Begründung für die Auswahl der Filterkondensatoren
Stromwelligkeiten wirken sich direkt auf die Heizung und Lebensdauer von Kondensatoren aus, insbesondere von elektrolytischen. Daher müssen Kondensatoren nach Typ und Nennleistung unter Berücksichtigung der geschätzten Lebensdauer und der maximalen Ströme ausgewählt werden.Mit dieser Formel sollten Sie prüfen, ob das Modul diesen Motor steuern kann, ohne die maximalen Kondensatorströme zu überschreiten.Wie TI-Experten berechnet haben, kann ein Modul mit einer PWM-Frequenz von 40 kHz mit den im Diagramm angegebenen Kondensatoren einen blockierten Motor lange Zeit mit einem Strom durch die Wicklungen von mehr als 80 A versorgen.Diagramm der Hauptplatine des Moduls
(Zum Vergrößern anklicken)
(Zum Vergrößern anklicken)Anschlussposition
Ansicht der Hauptplatine von oben: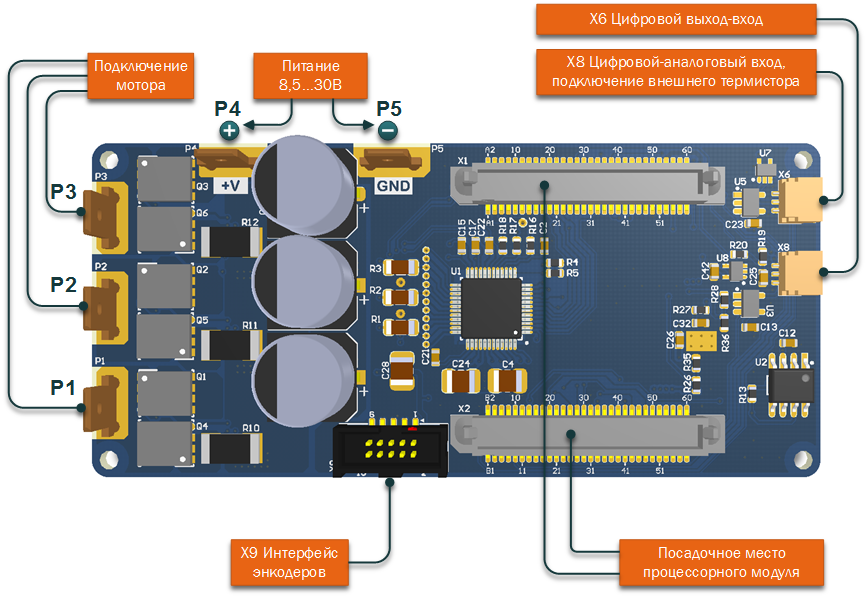
(Zum Vergrößern anklicken)Ansicht der Hauptplatine von unten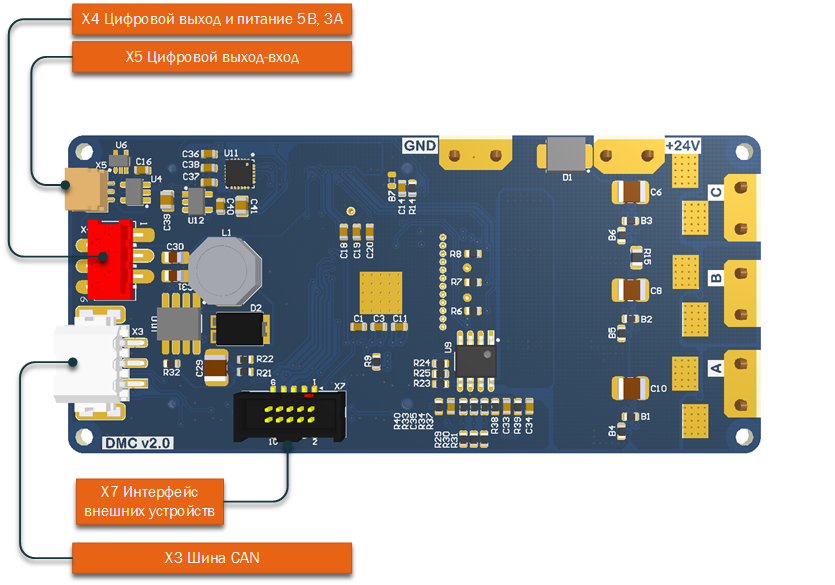
(Zum Vergrößern anklicken)Abmessungen
(Zum Vergrößern anklicken)Projekt-Repository
Alle projektbezogenen Materialien werden hier gespeichert .Die Schaltung und die Leiterplatte wurden in Altium Designer 17.0.6 entwickelt.Im Repository finden Sie das 3D- Baugruppenmodell im STEP-Format.Es gibt auch eine Berechnungsdatei für den DC-DC-Wandler auf dem A8586 im Mathcad-Format.Der Programmteil des Projekts wird im nächsten Artikel behandelt.Source: https://habr.com/ru/post/de401873/
All Articles