
Es ist unmöglich festzustellen, wann die Gesellschaft begann, sich um ihre Rasenflächen zu kümmern. Ehrlich gesagt war und ist das Mähen von Gras eine Notwendigkeit. Aber Unkrautbekämpfung, Trimmen und andere Exzesse sind es nicht. Ein schöner Rasen ist ein Statussymbol in modernen Vororten auf der ganzen Welt. Wenn die Außerirdischen zu uns kommen, werden sie wahrscheinlich sofort bemerken, wie ordentlich unsere Rasenflächen sind. Und diese Errungenschaft der Zivilisation wurde mit der Ankunft spezieller Maschinen zum Grasschneiden möglich.
Die ersten Rasenmäher waren Vertreter von Rindern. Das Problem ist, dass es sehr schwierig ist, sie zu warten, sie schneiden ungleichmäßig Gras, weshalb sie sich nicht in Familien niedergelassen haben, die für den perfekten Rasen kämpfen. Wenn Sie sich an den unangenehmen Geruch der Nebenprodukte ihrer Tätigkeit erinnern, wird klar, warum die Tiere nicht mehr beliebt waren und allmählich in die Hinterhöfe zogen. Um das Erscheinungsbild des prestigeträchtigen Innenhofs zu erhalten, suchten die Menschen nach anderen Mitteln.
Der erste mechanische Rasenmäher wurde 1830 von Edwin Badding erfunden, ohne Zweifel, um seinen Nachbarn zu übertreffen, der das Geflecht benutzte. Sein Mäher war den heutigen Optionen sehr ähnlich, bei denen die Messer in einem Zylinder befestigt sind, der sich dreht, wenn sich der Mäher vorwärts bewegt. Badding erhielt ein Patent für das Gerät, was seine Nachbarn sehr verärgerte - die meisten mussten einen Budding-Mäher kaufen, da fast alle das gleiche für sich kauften, obwohl sie nicht benötigt wurden.
In den 1930er Jahren hatte sich der Kalte Krieg zwischen Badding und seinem Nachbarn auf fast jeden Hof des Planeten ausgebreitet, und ein Ende war nicht in Sicht. Wenn Sie in unsere Zeit zurückgehen, dann wurden allein im Jahr 2014 auf dem Markt für Garten- und Rasenpflege Umsätze in Höhe von 10 Milliarden US-Dollar erzielt. Der technologische Fortschritt hat zur Entstehung sehr fortschrittlicher Maschinen geführt, die auf Gras kauen. Für kleine Flächen verwenden die meisten Menschen Mäher mit Einzylinder-Verbrennungsmotoren, die Sie vor sich schieben müssen. Viele Mäher sind mit Stoffbeuteln ausgestattet, um Schrott zu sammeln, den jeder hasst, wenn er sich allmählich füllt, wodurch der Mäher schwerer zu schieben ist. Aber da die Nachbarn es benutzen, müssen wir es auch. Größere Abschnitte erfordern teure Mäher zum Fahren. Viele Besitzer solcher Mäher können sich auf einer nahe gelegenen Party rühmen, ein hydrostatisches Getriebe zu haben, obwohl sie keine Ahnung haben, was es ist.
Wir Hacker sind nicht besser als sie. Wir haben wie alle auch Rasenflächen. Aber im Gegensatz zu allen anderen haben wir Lötkolben. Und wir wissen, wie man sie benutzt. Ich schlage vor, die Grundlagen des benachbarten Krieges zu untergraben, so wie es Badding vor 85 Jahren getan hat. Holen Sie sich Ihren Lieblings-Mikrocontroller und arbeiten Sie!
Wirklich autonome Rasenmäher - Heben Sie bitte Ihre Hände
Zunächst werden wir uns damit befassen. Diese dummen "Roboter-Rasenmäher",
die einen Drahtbegrenzer verwenden und Gras mähen und sich auf zufälligen Wegen bewegen , brauchen wir nicht. Jedem Hacker, der für diesen Titel steht, ist klar, dass der Mäher ein Positionierungssystem benötigt. "Warum?" - Du fragst. Sehen Sie sich ein Video darüber an, wie so etwas wie ein Insekt im Wind herumwirbelt, und Sie sagen sich: "Weißt du, dieses Ding würde viel besser funktionieren, wenn du wüsstest, wo es ist." Das werden wir tun. Um einen autonomen Rasenmäher zu schaffen, benötigen wir ein Positionierungssystem. Wenn wir die XY-Koordinaten des Mähers finden können, wird die Automatisierung erheblich vereinfacht.
Natürlich gibt es auch andere Möglichkeiten, um Autonomie zu erreichen, und ich schlage vor, dass Sie diese in den Kommentaren diskutieren, aber in diesem Artikel werde ich Autonomie durch Positionierung beschreiben. Insbesondere durch Satellitenpositionierung.
GPS, RTK und DGPS
Das erste, was mir bei der Lösung des Problems der Ermittlung von Koordinaten außerhalb von Gebäuden in den Sinn kommt, ist GPS. Das zweite, was nach etwa 25 ms in den Sinn kommt, ist die Genauigkeit dieses Systems. Jeder weiß, dass die GPS-Genauigkeit zwischen 15 Metern liegt. Mit einem autonomen Rasenmäher funktioniert dies nicht. Es gibt jedoch zwei weitere Optionen:
RTK und
DGPS . Und diese Methoden haben bereits die Genauigkeit, die wir brauchen.
GPS-Standard
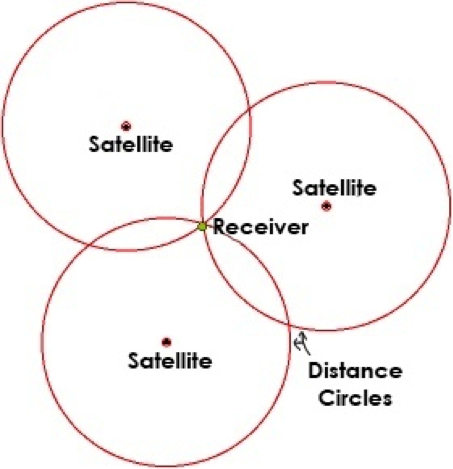
Bevor Sie in andere Systeme eintauchen, sollten Sie ein einfaches und vertrautes GPS in Betracht ziehen. Das GPS im Telefon misst die Entfernung zu mindestens drei Satelliten. Dies ermöglicht es ihm, seine Position durch
Trilateration zu finden (nicht zu verwechseln mit Triangulation). Natürlich hängt die Genauigkeit von der Genauigkeit der Entfernungsmessung zu Satelliten ab. Diese Entfernung wird durch Zeitstempel bestimmt, die mit der Genauigkeit von Atomuhren spezifiziert sind, die von Satelliten kommen. Der Empfänger nimmt einfach die Differenz zwischen der Sendezeit und der Empfangszeit und multipliziert sie mit der Lichtgeschwindigkeit, um die Entfernung von ihr zum Satelliten zu erhalten.
Zusätzlich zum Zeitstempel überträgt der Satellit seinen Standort. Ausgerüstet mit der Entfernung zum Satelliten und seiner Position kennt der Empfänger tatsächlich den Radius des Kreises, in dessen Zentrum sich der Satellit befindet, und auf dem Umfang - dem Empfänger. Und wenn sich drei dieser Kreise vereinen - Broads! Sie erhalten Ihren Standort durch Trilateration.
Verschiedene Dinge schränken die Genauigkeit einer Methode ein. Eines der wichtigsten ist die Atmosphäre. Die Ionosphäre kann Signale verzögern, was zu Problemen führt. Je größer die Dicke der Atmosphäre ist, um das Signal zu überwinden, desto größer ist dieser Effekt. Daher ist das vom Satelliten über dem Horizont kommende Signal anfälliger für Verzerrungen als das Signal vom Satelliten über dem Kopf. Diese Störungen ändern sich ständig und aufgrund dessen liegt ein nicht behebbarer Positionierungsfehler vor - bis zu 10 Metern.
RTK und Differential GPS
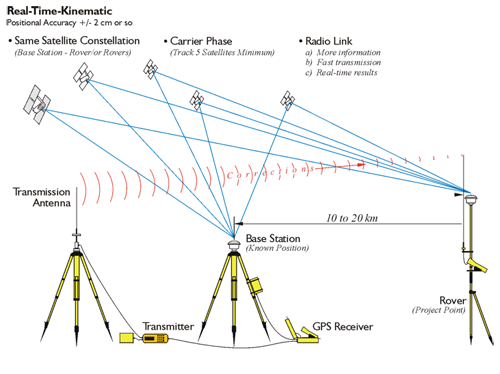
Wenn wir nun das GPS-Betriebsschema und seine grundlegenden Einschränkungen kennen, können wir verstehen, wie diese beseitigt und die Positionierungsgenauigkeit verbessert werden können. Dies kann erreicht werden, indem ein zweiter fester Empfänger in die Schaltung aufgenommen wird. Er bewegt sich nicht und sein Standort ist sicher bekannt. Ein mobiler Empfänger, der seinen Standort kennen muss, sollte sich in der Nähe eines festen Empfängers befinden, damit diese beiden Empfänger Signale von denselben GPS-Satelliten vergleichen und dann darüber sprechen können.
Der Festnetzempfänger vergleicht die von ihm und dem Mobilfunkempfänger empfangenen GPS-Signale. Da der feste Empfänger seinen Standort bereits kennt, kann er einen Fehler im Signal abfangen und die Korrektur an den mobilen Empfänger senden. So funktionieren Echtzeitkinematik (RTK) und Differential-GPS-Systeme.
Differenzielles GPS kann eine Genauigkeit von bis zu 10 cm erreichen, während RTK den analogen Teil des Signals zusammen mit dem digitalen schätzt und daher eine Genauigkeit von 2 cm erreicht. Dies ist für einen autonomen Rasenmäher ziemlich genau.
Freie Marktoptionen
Für eine derart präzise Positionierung werden verschiedene verfügbare Gerätetypen verkauft. Sie sind nicht billig, aber nicht sehr schwer für diejenigen, die in diesem Projekt erfolgreich sein wollen. Das billigste System, das wir gefunden haben, ist
REACH RTK . Es kostet 570 US-Dollar, aber alle Sets sind nach dem Verkauf sehr schnell ausverkauft. Es gibt auch einen
Piksi von Swift Navigation, eine teurere Option, die bereits 1.000 US-Dollar
kostet . Wenn Sie andere Optionen kennen, geben Sie diese bitte in den Kommentaren an.
Die Verwendung von RTK GPS für einen eigenständigen Rasenmäher steht Ihnen oder Ihrem Team jetzt zur Verfügung. Wenn Sie in Echtzeit genau wissen, wo sich Ihr Mäher befindet, werden Probleme beim Schreiben von Code und beim Maschinenbau direkt gelöst. Warum haben sie sich nicht entschieden? Worauf warten Sie noch?
CNC-Mäher
Stellen Sie sich vor, was passiert, wenn Sie Ihren Rasenmäher mit einem
G-Code überqueren. Wenn Sie ein ferngesteuertes Ein / Aus-Messer anbringen, können Sie den Mäher nicht mähen, sondern fernsteuern.
Das Bild, das ich gezeichnet habe, ist in großen Räumen sinnvoll, in denen kleine kabellose Robotermäher nicht so effektiv sind. Wenn der Bereich zu groß ist, ist es kaum sinnvoll, einen Umkreis um ihn herum zu installieren, und dies macht die GPS-Option akzeptabler (obwohl das Signal dieses Umkreises
gefälscht werden kann , wodurch wir einem fertigen Robotermäher GPS hinzufügen können).
Aus Verbrauchersicht müssen Sie kleine Probleme lösen, um in den großen Rasenmarkt einzusteigen, z. B. Sicherheit, Vermeidung von Hindernissen (heruntergefallene Gliedmaßen, Menschen, Rinder), Verfolgung des Kraftstoffstands usw. Für Hacker ist dieses Konzept jedoch zu interessant, um es zu umgehen. Wir freuen uns, von Ihren Abenteuern mit automatischen Rasenmähern zu hören, und erwarten, dass eines Tages ein halber Hektar großer lustiger Roger im Gras geschnitten wird.