Historisch gesehen begann der Einsatz von Robotern mit der Produktion. Zuerst wurden Roboter entwickelt, um einzelne Operationen durchzuführen, dann Roboterproduktionsstätten und schließlich flexible Produktionssysteme. Die Erfahrung ihres Betriebs lässt den Schluss zu, dass in naher Zukunft das Produktvolumen um ein Vielfaches erhöht werden kann, ohne die Kosten für menschliche Arbeit zu erhöhen. Diese zweifelsfreie Errungenschaft des wissenschaftlichen und technologischen Fortschritts lässt jedoch nicht nur auf lang erwartete Fülle, das Verschwinden der Armut usw. hoffen, sondern auch auf bestimmte Befürchtungen.
 Automatische Produktion [1]
Automatische Produktion [1]In der Tat kommt nichts aus dem Nichts. Wenn der Verbrauch mehrmals steigt, werden die gleichen Ressourcen benötigt. Und die Umwelt steht bereits unter kritischem Druck der Menschheit. Laut Statistik produziert bereits jetzt eine Person etwa 3-5 Liter Müll pro Tag, das sind bis zu 120 Liter pro Monat, und 1.500 Liter pro Jahr [9, der Quellenfehler wird aufgrund der Beobachtung von Dragonnur korrigiert]. Selbst eine Verdoppelung der Produktion bedeutet eine Umweltkatastrophe. Es stellt sich heraus, dass Roboter Atomwaffen etwas ähnlich sind - mit großem Potenzial (bei zerstörerischen Waffen für kreative Roboter) ist ihr vollständiger Einsatz aufgrund der allgemeinen tragischen Folgen unmöglich.
 Aufnahme aus dem Film „Deponie“, 2014 [2]
Aufnahme aus dem Film „Deponie“, 2014 [2]Glücklicherweise sind Roboter keine thermonuklearen Bomben und es gibt einen Ausweg aus dem Widerspruch zwischen Möglichkeiten und Konsequenzen. Dieser Ausgang sind die Roboter selbst, die für die Entsorgung von Produktions- und Verbrauchsabfällen geeignet sind. Nach dem alten Prinzip wird Gleiches Gleiches behandelt. Wenn wir die Produktion verdoppeln und gleichzeitig solche Robotersysteme entwickeln, die 50% des Abfalls nutzen und in sekundäre Rohstoffe oder Energie umwandeln, ändert sich die Umweltbelastung nicht. Wenn der Auslastungsgrad 67% erreicht, kann die Produktion verdreifacht werden. Usw.
Dies ist natürlich ein äußerst grobes Schema. In der Praxis müssen bestimmte Methoden und Entsorgungsmengen, die Kosten für die Herstellung zusätzlicher Geräte und viele andere Faktoren berücksichtigt werden. Es ist jedoch offensichtlich, dass der Anstieg des Verbrauchs eng mit dem Grad der Abfallverarbeitung zusammenhängt. Und da eine Gesellschaft mit hohem Konsum nicht zu bereit ist, schmutzige Handarbeit zu leisten, müssen die Roboter hart arbeiten. Und sie haben bereits mit der Arbeit begonnen.
Die Abfallentsorgungsaufgabe kann in drei Unteraufgaben unterteilt werden:
- Abfallsammlung;
- ihre Sortierung;
- Abfallrecycling.
Beginnen wir mit dem ersten. Jetzt werden Sie niemanden mit einem Roboterstaubsauger oder einem Roboter zum Waschen von Fenstern überraschen. Dies sind jedoch die einfachsten Roboter zum Sammeln von Abfällen. Aber natürlich sind ihre Fähigkeiten äußerst begrenzt, und der entsprechende Abfall - hauptsächlich Haushalts- und Straßenstaub - ist im Hinblick auf die weitere Entsorgung nicht von Interesse.
 IClebo Pop Robot Staubsauger [3]
IClebo Pop Robot Staubsauger [3] Fensterwaschroboter Windoro WCR-I001 [4]
Fensterwaschroboter Windoro WCR-I001 [4]Aber der "wandernde" Papierkorb ist schon viel effektiver als der übliche. Im Labor für die Entwicklung von Interaktionen und Kommunikation der Japanischen Technologischen Universität Toyohashi wurde ein kleiner Radstandbehälter erstellt. Es heißt Social Trash Box (STB). Der Roboter ist mit einem Mikroprozessor, einer Videokamera und einem Lautsprecher sowie Infrarotsensoren und einem Abstandssensor ausgestattet.
 Soziale Mülltonne [5]
Soziale Mülltonne [5]Der Roboter beginnt seine intensive Aktivität, indem er den Ort bestimmt, an dem sich gerade Menschen befinden. Dies geschieht mit einem Infrarotsensor, der auf die Hitze ihres Körpers reagiert. Der Abstandssensor ist für die Sicherheit der Bewegung des Roboters zwischen Personen verantwortlich. Um nach Müll selbst zu suchen, verwendet STB eine integrierte Kamera in Kombination mit einem Objekterkennungsalgorithmus.
Wenn der Roboter Müll findet, beginnt er, aktive „Körperbewegungen“ auszuführen und Tonsignale auszusenden. So „bittet“ er die Leute, den Müll aufzuheben und in den Container zu werfen.
Infrarotsensoren im oberen Teil des Eimers zeigen an, ob der Müll wirklich dort angekommen ist, wo er sein sollte. Der Roboter kann den Eimer sogar leicht in eine beliebige Richtung kippen, um es einer Person zu erleichtern, ihre Aufgabe zu erledigen. Im Allgemeinen arbeiten wir aktiv an der Erhaltung der Umwelt zwischen Mensch und Maschine. Darüber hinaus fungiert der Roboter nicht nur als Müllsammler, sondern dient auch als Wecker für das Gewissen von Liebhabern, überall Müll zu entsorgen.
Aber so wie ein Meer nicht aufgeschöpft werden kann, kann auch nicht der gesamte Müll in kleinen Körben gesammelt werden. Dafür werden leistungsstärkere Einheiten benötigt. Zum Beispiel diejenigen, die im Rahmen des DustBot-Projekts (www.dustbot.org) entwickelt und getestet wurden, um Technologien für die Roboterreinigung und Müllabfuhr im Kleinstadtmaßstab zu entwickeln. Viele Experten aus Italien, Spanien, Großbritannien, der Schweiz und Schweden sind daran beteiligt. Die Hauptrolle spielen jedoch Forscher der Hochschule St. Anne (Scuola Superiore Sant'Anna) in Pisa. Das Projekt wird von der Europäischen Kommission finanziell unterstützt.
Der erste Roboter namens DustClean ist eine autonome Kehrmaschine, die mit rotierenden Bürsten und einem Staubsauger ausgestattet ist. DustClean räumt die Straßen auf, fährt auf einer bestimmten Route durch die Stadt, hält vor Fußgängern an und vermeidet Hindernisse.
 DustClean Robot [6]
DustClean Robot [6]Der zweite Roboter namens DustCart kann als Aasfresser bezeichnet werden. Er sammelt Müllsäcke von Stadtbewohnern und bringt sie zum Recycling. Die Höhe des Roboters beträgt 150 cm, das Gewicht 70 kg, die Geschwindigkeit 1 m / s. Eine Akkuladung reicht für 16 km.
 DustCart Robot [6]
DustCart Robot [6]Damit der Roboter-Müllwagen sein Ziel erreichen kann, muss er telefonisch angerufen werden. Nachdem der Roboter angekommen ist, gibt der Kunde seinen persönlichen Code über den Bildschirm des DustCart-Gehäuses ein. Dies ist notwendig, da in Zukunft solche Systeme bezahlt werden sollen. Gleichzeitig kann eine Person verschiedene Wege für den weiteren Transport von Müll sowie die Art des Mülls (organischer Abfall, Glas, Kunststoff oder Papier) wählen. Nachdem die Manipulationen abgeschlossen sind, legt der Kunde den Müllsack in die sich öffnende Luke des Roboters und geht zur Abfallsammelstelle, wo er den Sack entlädt.
Roboter aus dem DustBot-Projekt können das Problem der Speicherbereinigung nicht vollständig lösen. Ihr Zweck ist bescheidener - Arbeiten an Orten, an denen herkömmliche Reinigungsgeräte nicht passen. Und es gibt viele solcher Orte in europäischen Städten. Darüber hinaus sind Roboter mit Sensoren ausgestattet, die den Gehalt an Benzol, Stickoxiden, Kohlenstoff und Schwefel in der Luft bestimmen, sowie mit Temperatursensoren.
In der italienischen Stadt Pechcholi wurden Feldtests mit DastBusts durchgeführt. Die Gemeinde Pechcholi ist die erste Siedlung der Welt, in der auf den Straßen eine separate Fahrspur für die Bewegung von Robotern eingerichtet wurde.
 DustCart hat es eilig mit der Auswahl für die nächste Portion Müll [7]
DustCart hat es eilig mit der Auswahl für die nächste Portion Müll [7]Der nächste auf einer Skala nach DustBot wird der von Volvo vorgestellte ROARY-Roboter sein. Die Entwicklung wurde in Zusammenarbeit mit Spezialisten der Chalmers University of Technology, der Malardalen University und der University of Pennsylvania durchgeführt. Das Projekt zeigt die Möglichkeiten der gemeinsamen Arbeit zweier Roboter auf, die in Zukunft dazu beitragen werden, die tägliche Arbeit der städtischen Arbeiter zu erleichtern.
 ROARY arbeitet, eine Aufklärungsdrohne schnüffelt irgendwo in der Nähe [8]
ROARY arbeitet, eine Aufklärungsdrohne schnüffelt irgendwo in der Nähe [8]ROARY wird auf einer speziellen Plattform transportiert, die an der Rückseite des Müllwagens befestigt ist. Der Müllwagen selbst ist rechts kaum sichtbar, so dass der falsche Eindruck entstehen kann, dass ROARY völlig autonom ist. Tatsächlich ist seine Autonomie erheblich geringer als die von DustBots.
Bei der Ankunft aktiviert der Bediener ein unbemanntes Luftfahrzeug, das auf dem Dach des Fahrzeugs montiert ist. Anschließend scannt die Drohne die Umgebung, um Müllcontainer zu erkennen. Das System überträgt Daten über die Position der Tanks an den Roboter, der den Müllcontainer auf eine spezielle Plattform lädt, zum Müllwagen zurückkehrt, den Tank anhebt und ihn von Schmutz befreit. Alles in allem ist ROARY für den schwierigsten und schmutzigsten Teil der Arbeit eines Aasfressers geeignet.
Um durch das Gelände zu navigieren, verwendet ROARY GPS und Lidar, um Kollisionen mit Hindernissen zu vermeiden. Mit der eingebauten Kamera kann ROARY beim Entleeren des Containers ein Objekt erkennen, das sich gefährlich nahe am Müllwagen befindet, und die automatische Not-Aus-Funktion warnt vor möglichen unangenehmen Folgen. Eine Notabschaltung kann vom Müllwagenfahrer verwendet werden.
Nach den drei untersuchten Systemen sind Roboter im Allgemeinen durchaus in der Lage, die Speicherbereinigung durchzuführen. Besonders wenn die Leute ihnen ein wenig helfen. Das ist nur fair - jeder sollte nach sich selbst aufräumen. Aber niemand ist verpflichtet, nach anderen aufzuräumen, geschweige denn die über die Jahre angesammelten Abfälle von irgendjemandem aufzuheben. Daher müssen Sie sich wieder an Roboter wenden. Insbesondere das ZenRobotics Recycler (ZRR) -System, das von der finnischen Firma ZenRobotics entwickelt wurde.
Derzeit wird die klassische Methode zum Vorsortieren von Müll in mehreren Schritten durchgeführt:
- Sortieren Sie Metall / Nichtmetall mit leistungsstarken Elektromagneten.
- Das Sortieren ist schwer / nicht schwer, wenn Luft geblasen wird.
- Manuelle Stufe.
In der dritten Phase gibt es Leute am Förderer, die mit Hilfe einer bestimmten Einweisung und erworbener Fähigkeiten den Müll sortieren. Danach werden die in verschiedenen Behältern angelegten Abfälle zum Recycling oder für Biokraftstoffe an spezielle Anlagen geschickt. ZenRobotics hat beschlossen, Menschen vor schmutziger und eintöniger Arbeit zu bewahren, indem eine spezielle Robotertechnologie entwickelt wurde, die alle drei Stufen in einer kombiniert.
Zwar geht es bisher hauptsächlich um Bauabfälle und insbesondere um die Müllberge, die nach dem Abriss alter Gebäude übrig bleiben. ZRR besteht aus 3 Hauptteilen. Erstens sind dies Manipulatoren, die Standard-Industrieroboter sind. Zweitens sind dies Sensoren zur Erkennung von Trümmerfragmenten - Videokameras verschiedener Typen und Metalldetektoren. Die Sensoren sind fest. Drittens Industriecomputer. Die Basis von „Intelligence“ ZRR ist Software, die vom Unternehmen regelmäßig über das Internet aktualisiert wird.
Das ZRR-Gerät ist in der Abbildung deutlich dargestellt und zeigt den aktuellen Prototyp eines kompletten Industriesystems. Bauabfälle werden mit einem Förderer unter den Sensorblock befördert. Sensoren erkennen jedes Müllfragment und übertragen Informationen über seine Position auf dem Förderer, Größe und Material - Ziegel, Holz, Bewehrung usw. - an das Manipulator-Steuerungssystem.
 Der aktuelle Prototyp ZRR [9]
Der aktuelle Prototyp ZRR [9]Wenn das Fragment den Abdeckungsbereich des Manipulators erreicht, muss es sich nur noch in die bereits berechnete Position bewegen, den Greifer unter Berücksichtigung der Fragmentgröße öffnen, das Fragment vom Förderer entfernen und mit der entsprechenden Fraktion in den Behälter werfen.
Es ist möglich, dass einige Schmutzfragmente von Sensoren nicht zuverlässig erkannt werden. In diesem Fall werden sie von den Manipulatoren nicht zufällig sortiert. Nicht erkannte Fragmente werden vom Förderer an eine spezielle Sammlung geliefert, von wo aus sie unter den Sensoren wieder dem Anfang des Förderers zugeführt werden. Mit einer anderen Position auf dem Band und relativ zueinander können diese Fragmente höchstwahrscheinlich korrekt erkannt werden. Der Prozess wird fortgesetzt, bis die gesamte Müllcharge in Fraktionen zerlegt ist.
Das kommerzielle ZRR-System ist mehr als das Prototyp-Level, es enthält mindestens zwei Manipulatoren und sperrige Behälter.
 ZRR-Manipulatoren bei der Arbeit [10]
ZRR-Manipulatoren bei der Arbeit [10] ZRR in der kommerziellen Mindestversion [10]
ZRR in der kommerziellen Mindestversion [10]Basierend auf ZRR können mehrstufige Sortiersysteme gebaut werden. Separate Installationen in einem solchen System funktionieren nacheinander. Wenn bei der ersten Installation ein Müllfragment übersprungen wird, wird die zweite höchstwahrscheinlich damit fertig.
ZRR-Software kann unabhängige Entscheidungen treffen und selbst lernen. Daher ist der menschliche Eingriff in das System minimal und nur bei Fehlern erforderlich.
Fairerweise sollte beachtet werden, dass ZRR nicht die einzig mögliche Lösung zum Sortieren von Müll ohne die Teilnahme (oder mit minimaler Beteiligung) einer Person ist. So hat das deutsche Unternehmen GUNTHER ENVIROTECH eine spezielle Sortieranlage SPLITTER zur Sortierung von Siedlungsabfällen entwickelt. Diese Installation verwendet keine Sensoren, Manipulatoren und hochentwickelte Software. Alle von ihnen werden durch Schnecken und Schächte einer speziellen Form ersetzt, mit denen Sie den Müll nach Form, Größe und Gewicht in 3 Fraktionen aufteilen können.
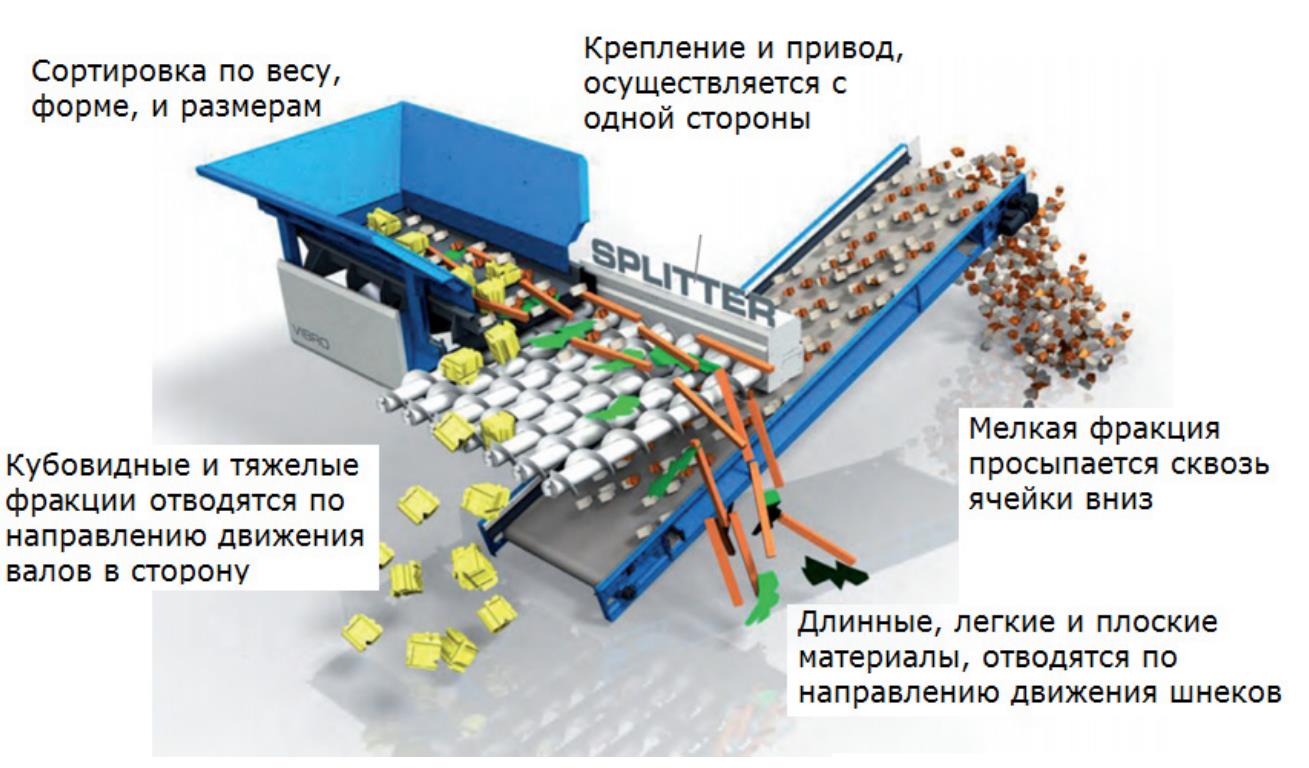 Installieren Sie SPLITTER [11]
Installieren Sie SPLITTER [11]Trotz der Einfachheit und Originalität des Designs ist es offensichtlich, dass SPLITTER nur eine grobe primäre Mülltrennung in Fraktionen durchführen kann. Wenn eine weitere Sortierung erforderlich ist, ist ein System vom Typ ZRR erforderlich. Daher konkurrieren diese Technologien nicht so sehr miteinander, sondern ergänzen sich bei der Lösung des Problems, das wir zu Beginn des Artikels gestellt haben - Abfallrecycling um mindestens 2/3 mithilfe von Robotik.
Und dann stellt sich heraus, dass wir, wenn wir von einer Müllentsorgung von 2/3 sprechen, die Fähigkeiten der verfügbaren Technologien erheblich unterschätzen. Da die Systeme bereits in Betrieb sind, kann die Auslastungsrate auf 97% erhöht werden!
In den frühen 90er Jahren begann eine Gruppe niederländischer Wissenschaftler mit der Forschung und Entwicklung einer neuen Technologie, deren Hauptaufgaben die Abfallverarbeitung ohne vorherige Sortierung, die Gewinnung hochwertiger (einschließlich aus giftigen und schädlichen Substanzen gereinigter) Rohstoffe sowie die Kosteneffizienz waren. Rentabilität und gleichzeitig Umweltsicherheit.
Im Jahr 2000 erreichten Wissenschaftler ihr Ziel, testeten und patentierten die sogenannte „3R“ -Technologie und kombinierten alle oben genannten Prinzipien [12]. Die Technologie wird von der EPC Group betrieben.
Eine Müllrecyclinganlage, die auf der Grundlage der 3R-Prinzipien gebaut wurde, kann verarbeiten:
- Hausmüll;
- sperriger, nicht zerkleinerter Müll (Möbel, Baumaterialien usw.);
- organischer Abfall;
- Deponieinhalt;
- nicht zusammengebaute PKW- und LKW-Teile, Batterien, Reifen;
- elektronische und elektrische Geräte (Fernseher, Kühlschränke usw.);
- medizinischer Abfall;
- Industrieabfälle;
- Batterien, Thermometer, Lampen
und vieles mehr.
Je nach Aufgabenstellung ist die Anlage mit den notwendigen unabhängigen Einheiten ausgestattet.
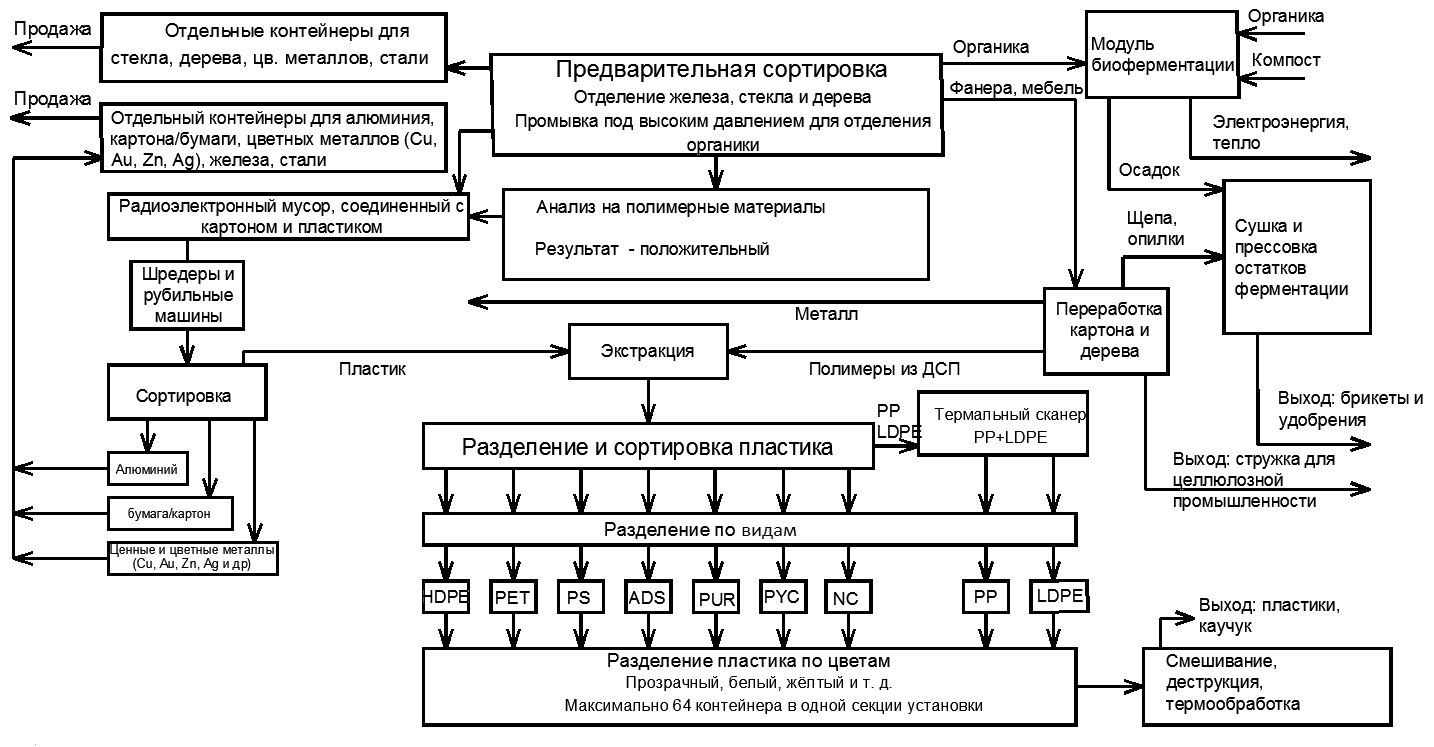 Verallgemeinertes Schema der Müllverarbeitung unter Verwendung der "3R" -Technologie [12]
Verallgemeinertes Schema der Müllverarbeitung unter Verwendung der "3R" -Technologie [12]In der Entwurfsphase wird eine Analyse der Abfälle durchgeführt, die im System recycelt werden sollen. Somit wird eine qualitative Zusammensetzung bestimmt, um die Wirksamkeit und Amortisation zu berechnen, die der Hersteller garantieren kann, sowie das Vorhandensein gefährlicher oder radioaktiver Substanzen in ihrer Zusammensetzung.
Das Folgende ist ein allgemeiner Prozess für das Recycling in einer 3R-Anlage.
- Unsortierte Abfälle werden automatisch direkt im Werk sortiert. Eine zusätzliche Abfallanalyse vor der Lieferung an das Werk ist nicht erforderlich.
- Der Recyclingprozess beginnt mit der Trennung von nicht-plastischen, elektrischen und elektronischen Bauteilen. Als nächstes werden magnetische Materialien sowie Holz und Glas getrennt. Alle von ihnen werden in Containern für den weiteren Verkauf oder die Verarbeitung verpackt. In dieser Phase ist die Integration von ZRR-Systemen in die „3R“ -Technologie möglich, um die Qualität zu verbessern und die Sortierung vollständig zu automatisieren.
- Der verbleibende kunststoffhaltige Abfall wird auf Qualität und Erosionsgrad untersucht. Danach gehen sie zu den Hubschraubern.
- Die zweite Sortierung bereits zerkleinerter Materialien: Metalle, Papier, Pappe werden getrennt und zum Verkauf angeboten.
- Kunststoffe werden im Extraktor von Restprodukten gereinigt. Farbstoffe werden aus Materialien isoliert und können wiederverwendet werden.
- Kunststoff wird nach Typ sortiert - PET, PVC, HP, HDPE, PURE, ABS usw. Das Kunststoffverarbeitungsmodul umfasst bis zu 64 Behälter zur Trennung verschiedener Kunststoffarten. Der Kunststoff wird mit einem thermischen Scanner basierend auf dem Schmelzindex getrennt, da jede Spezies ihre eigene Schmelztemperatur hat.
- Der nach Typ unterteilte Kunststoff wird weiter nach Farbe sortiert.
- Mischen und Pressen: Kunststoffe werden unter Berücksichtigung der Kundenanforderungen zum Verkauf vorbereitet.
- Gasfermentation - Organische Materialien werden zur Herstellung von Biokraftstoffen gesammelt.
- Verschiedene Holzarten werden für die weitere Verwendung in der Zellstoff- und Papierindustrie verarbeitet und gereinigt.
- Rohe Rückstände aus der Gasfermentation und Späne aus Pappe und Holz werden zum Brikettblock geliefert, wo die Masse getrocknet, gemahlen und zu Brennstoffbriketts gepresst wird. Briketts können auch in der Landwirtschaft und in der Landwirtschaft als Dünger verwendet werden.
Beachten Sie, dass Biogas aus der Fermentationseinheit zur Energieerzeugung verwendet wird. Somit hängt die Menge der erhaltenen Energie nicht direkt vom Prozentsatz der organischen Substanz in den Abfällen ab, die in der Anlage aufgenommen werden, sondern nur von der Zeit und Intensität der Fermentation. Daher kann die Anlage in fast jedem Fall nicht zum Verbraucher, sondern zum Energieversorger (auch für sich selbst) gemacht werden.
Basierend auf den Berechnungen der EPC-Gruppe erhalten wir bei der Verarbeitung von 100 kg Abfall 97 kg hochwertige Fertigrohstoffe (Ertrag und Qualität des Rohstoffs hängen von der Art des dem System zugeführten Abfalls ab), und die Projektrückzahlung wird 30-50% pro Jahr erreichen.
Mit der 3R-Technologie wurden bereits mehrere Müllrecyclinganlagen gebaut, darunter in Düsseldorf, Amsterdam und Harlingen. In Jakarta befindet sich eine Fabrik im Bau.
Das Folgende ist eine vergleichende Analyse der geplanten Anlage in Jakarta und bestehender Anlagen [12].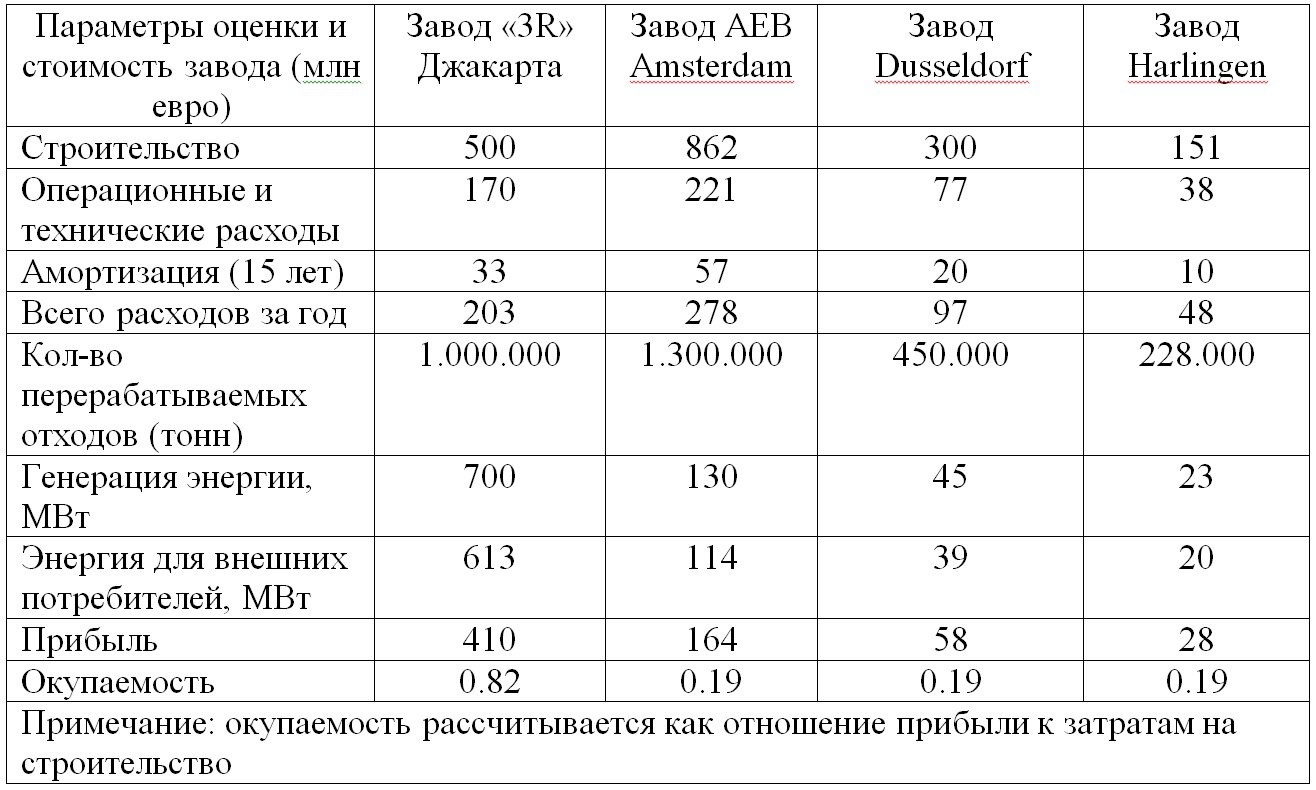 Wie aus der Tabelle hervorgeht, verarbeiten alle Anlagen der 3R-Technologie nicht nur Müll, sondern sind auch Energiequellen für externe Verbraucher.Zusammenfassend lässt sich sagen, dass der Prozess des Sammelns, Sortierens und Verarbeitens von Abfällen nahezu vollständig automatisiert werden kann und auf vorhandenen Technologien basiert. Darüber hinaus kann die automatische Abfallentsorgung erhebliche Gewinne bringen. Im Wesentlichen muss eine Person nur den Robotern in ihrem neuen edlen Beruf helfen und dennoch keine Eisverpackungen an dem Robotercontainer vorbei werfen, der hinter ihnen herstürzt. Andernfalls funktioniert es nicht gut.
Wie aus der Tabelle hervorgeht, verarbeiten alle Anlagen der 3R-Technologie nicht nur Müll, sondern sind auch Energiequellen für externe Verbraucher.Zusammenfassend lässt sich sagen, dass der Prozess des Sammelns, Sortierens und Verarbeitens von Abfällen nahezu vollständig automatisiert werden kann und auf vorhandenen Technologien basiert. Darüber hinaus kann die automatische Abfallentsorgung erhebliche Gewinne bringen. Im Wesentlichen muss eine Person nur den Robotern in ihrem neuen edlen Beruf helfen und dennoch keine Eisverpackungen an dem Robotercontainer vorbei werfen, der hinter ihnen herstürzt. Andernfalls funktioniert es nicht gut.