Wenn Sie vor dem Fliegen endlos durch das Fenster fliegen - schließen Sie nicht vorzeitig, dass es dumm ist. Vielleicht ist dies ein Miniaturroboter mit einem KI-System im selbstlernenden Modus.
 Ein UAV stürzte 11 500 Mal gegen die umgebenden Objekte und flog auf zufällig ausgewählten Pfaden
Ein UAV stürzte 11 500 Mal gegen die umgebenden Objekte und flog auf zufällig ausgewählten PfadenWie kann man einem unbemannten Luftfahrzeug beibringen, sich auf einer bestimmten Route zu bewegen und Hindernissen auszuweichen? Kann man bei der Indoor-Navigation auf eine digitale 3D-Karte verzichten? Um dieses Problem zu lösen, gibt es verschiedene geeignete Technologien, einschließlich
Simulationstraining , bei dem der „Lehrer“ der Drohne beibringt, auf verschiedenen Flugbahnen zu fliegen und gegebenenfalls ihre Aktionen zu korrigieren. Allmählich lernt das UAV Routen. Dieser Ansatz ist jedoch eindeutig durch die Eingabedaten begrenzt: Der Lehrer kann die Drohne nicht endlos begleiten.
In den letzten Jahren begannen sich maschinelle Lernsysteme ohne Lehrer schnell zu entwickeln (selbstüberwacht)
Lernen). Sie erwiesen sich in einer Reihe von Aufgaben als hervorragend:
Navigation ,
Greifen von Objekten (in der Robotik) und
Push / Pull-Aufgaben (intuitive Physik). Aber sind selbstlernende Systeme in der Lage, eine so komplexe Aufgabe wie die Indoor-Navigation zu meistern - und die Grenzen des Simulationstrainings zu überwinden?
Frühere Studien haben gezeigt, dass solche Systeme wirklich in der Lage sind, ohne einen Lehrer in einem Simulator zu lernen, und dass geschultes Wissen auf die reale Welt übertragen werden kann. In der Praxis ist jedoch eine andere Frage relevanter: Funktioniert die Selbstbildung in der realen Welt in einem beliebigen Raum ohne Simulator und vorkompilierte Karte? Schließlich ist es genau eine solche Aufgabe, der sich jeder von uns stellen muss, wenn er einen Roboter kauft und nach Hause bringt. Er muss die Situation unabhängig untersuchen und in jedem Haus navigieren (vorher ist es besser, alle zerbrechlichen Gegenstände aus den Räumen zu entfernen und sich auch zu verstecken).
Forscher der Carnegie Mellon University (USA) stellten die schwierigste Aufgabe, indem sie einen Quadrocopter mit einem neuronalen Netzwerk zum Selbsttraining in dem am schwierigsten zu navigierenden Raum mit einer großen Anzahl von Räumen und Möbeln platzierten. Die Autoren betonen, dass andere Studien versuchen, die Umgebung zu vereinfachen, um Kollisionen zu vermeiden. Im Gegenteil, sie wollten das UAV auf die maximale Anzahl von Kollisionen und Unfällen bringen, damit der Roboter aus dieser Erfahrung lernen kann. Wissenschaftler haben ein Selbststudiensystem entwickelt, das diese negative Erfahrung sowie die positive Erfahrung eines erfolgreichen Fluges entlang von Flugbahnen berücksichtigt.
Der Quadcopter AR Drone 2.0 unter der Kontrolle eines maschinellen Lernsystems wurde in 20 Räumen des Hauses getestet - und als Ergebnis gelernt, Kollisionen in jedem dieser Räume effektiv zu vermeiden. Ausbildungsdauer - 40 Flugstunden. Forscher sagen, dass die Kosten für Drohnen-Teile gering und leicht zu ersetzen sind, so dass die Wahrscheinlichkeit katastrophaler Unfälle vernachlässigt werden könnte.
Alle Kollisionen waren völlig zufällig. UAVs wurden an einem beliebigen Punkt im Raum platziert - und er flog in eine zufällige Richtung. Nach dem Unfall kehrte er zum Ausgangspunkt zurück - und flog wieder in eine zufällige Richtung, bis er wieder irgendwo abstürzte.
Die Quadrocopter-Kamera schießt mit 30 Bildern / s, und nach dem Unfall werden alle Bilder in zwei Teile unterteilt: Bilder mit einem guten Pfad werden in die positive Gruppe eingeordnet, und Bilder, die unmittelbar vor der Kollision aufgenommen wurden, werden in die negative Gruppe eingeordnet. Während des Trainings stürzte die Drohne 11.500 Mal gegen umgebende Objekte - und baute eine der größten UAV-Unfallbasen der Welt zusammen. Diese "negative Erfahrung" enthält Informationen über alle möglichen Arten, wie ein Quadrocopter irgendwo abstürzen kann.
Gruppen von positiven und negativen Erfahrungen wurden als Eingabe in das neuronale Netzwerk übertragen, das lernte, Vorhersagen darüber zu treffen, ob eine bestimmte positive Erfahrung aus der aktuellen Flugbahn zum Auftreten negativer Erfahrungen aus der Kollisionsprobe führen würde. Das heißt, das neuronale Netzwerk begann vorherzusagen, wohin es fliegen sollte.
Das neuronale Netzwerkdiagramm ist in der folgenden Abbildung dargestellt. Das Gewicht der Faltungsschichten (grau) wurde im Voraus gemäß der ImageNet-Klassifizierung berechnet, aber in den verbundenen Schichten (orange) wurden die Gewichte zufällig ausgewählt und die optimalsten Werte wurden während des Selbstlernprozesses auf der Grundlage von Unfalldaten assimiliert. Die Abbildung zeigt die Eingabedaten - Bilder von der Kamera (links) und die Ausgabedaten des neuronalen Netzwerks (die Entscheidung, geradeaus zu fliegen, nach links oder rechts zu drehen).

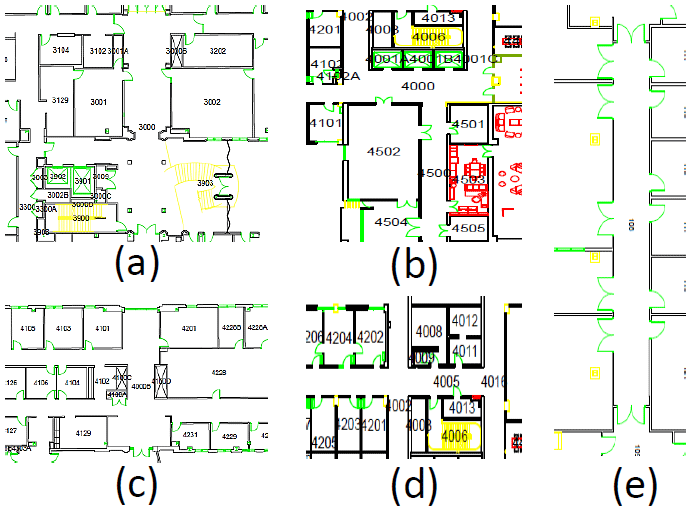
Das folgende Diagramm zeigt ein Testgelände - ein vierstöckiges Gebäude, in dem das Training mit Selbstdrohnen stattfand.
Die Ausgabe war ein überraschend effektives Navigationssystem für Drohnen. Ein ziemlich einfacher Ansatz zum Selbstlernen ist besonders für Räume mit einer großen Anzahl von Hindernissen, einschließlich sich bewegender Hindernisse wie Menschen, sehr effektiv.
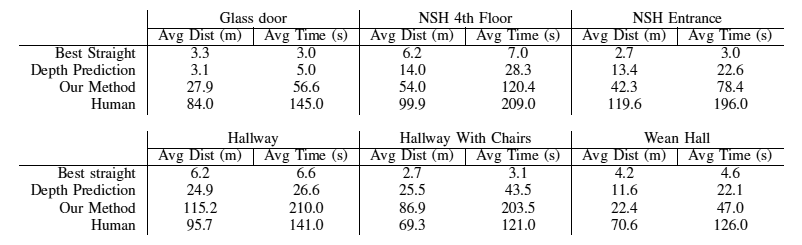
Vergleichstests zeigten, dass dieses Navigationssystem 2-10 mal effektiver ist als
Selbststudiensysteme mit einer monokularen Entfernungsschätzung . Insbesondere der Unterschied tritt neben den Glaswänden und Wänden ohne Erkennungszeichen auf, was traditionell die Arbeit des letzteren erschwert.
Die wissenschaftliche Arbeit wurde am 19. April 2017 auf der Preprint-Site arXiv.org (arXiv: 1704.05588v2) veröffentlicht.