Heute möchte ich Ihnen ein wenig darüber erzählen, was seit der
Veröffentlichung des
letzten Artikels interessant
war , in dem ich erzählte, wie wir drei in einem Jahr Unterwasser-GPS hergestellt haben.
Wir haben uns in Echtzeit entschieden, die Diskrepanz zwischen unserem Unterwasser-GPS und dem realen GPS zu bewerten. Und das nicht nur mit GPS, sondern mit kombinierten GPS / GLONASS-Daten. Wenn Sie daran interessiert sind, was passiert ist, willkommen bei cat!
Im Allgemeinen haben wir dies bereits überprüft, aber unter guten "marinen" Bedingungen. Nun entstand die Idee, alles tatsächlich in einer Pfütze zu überprüfen. Hier muss ich erklären, dass Flachwasserkörper für jede Hydroakustik als die schwierigsten angesehen werden (und nicht umsonst). Einige Hersteller arbeiten überhaupt nicht in seichtem Wasser, sie sagen, es gibt eine schreckliche Oberflächenschicht mit gelöstem Gas und Mehrfachreflexionen usw.
Im Allgemeinen gibt es eine wunderbare
Pfütze in
unserer Nähe
So sieht es vom Ufer aus:

Die maximale Tiefe beträgt ungefähr 2 bis 2,5 m, dh ein flacheres Gewässer, in dem möglicherweise eine Navigation erforderlich ist, ist schwer vorstellbar.
Speziell für die bevorstehenden Experimente wurde ein chinesisches funkgesteuertes Köderboot gekauft - ideal für unsere Zwecke: Es ist genug (manchmal scheint es mir zu viel) ein langsames, geräumiges Boot, das leicht verschiedene Modifikationen zulässt.
So sah das Boot ursprünglich aus:

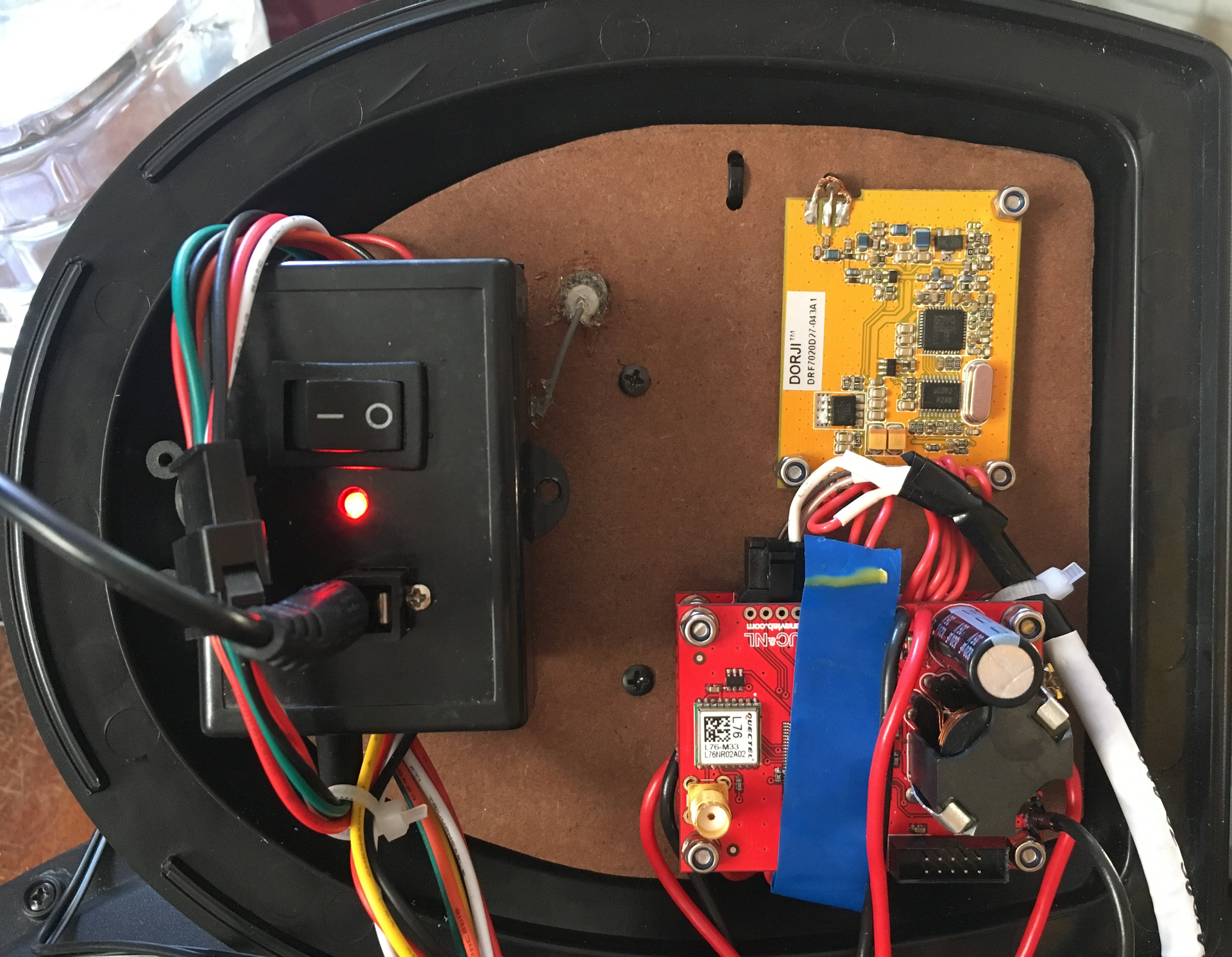
Dann haben wir eine Reihe von Verbesserungen durchgeführt. Die native Elektronik blieb fast vollständig und wurde nur geringfügig bewegt, mit Ausnahme des Mechanismus zum Zurücksetzen des Köders - da dies unnötig war, wurde er vollständig zerlegt.
Zusätzlich auf dem Boot installiert:
- eine Karte mit einem proprietären GPS / GLONASS-Empfänger (auf dem Foto nicht sichtbar - unter der Hartfaserplatte);
- 433 MHz DORJI Funkmodul + Antenne dazu;
- unser Board mit einem Prozessor, der die Ausgabe des GPS-Moduls und des akustischen Navigationsempfängers analysiert und das Ganze über Funk sendet;
- eine zusätzliche Bleibatterie von 1,5 Ah *, aus der alle unsere Verbraucher gespeist werden;
- Bulgin Bucaneer Ladeanschluss dafür;
- einen Kippschalter mit Gummikappe (wie bei unseren Bojen), der alle unsere Systeme umfasst;
- ein Paar einfacher Kabeleinführungen, durch die das Kabel des Navigationsempfängers RedNODE in das Boot eingeführt und das Kabel des akustischen Emitters ausgegeben wird (in einem anderen Experiment verwendet).
Auf dem Foto ist eine weitere Tafel zu sehen - dies ist nur aus einem anderen Experiment.
Wie bereits in einem früheren Artikel erwähnt, handelt es sich bei unserem Unterwasser-GPS um ein Navigationssystem mit langer Basis. Um es auf einem Teich zu betreiben, müssen vier schwimmende Satelliten-Navigationssignal-Relaisbojen installiert werden. Dies ist das Hauptnegativ der langen Basis - Sie müssen noch etwas auf den Teich legen, was bedeutet, dass Sie ein Boot benötigen. Aber diesmal wollten wir zeigen, wie alles ausschließlich vom Ufer aus gemacht werden kann.
Wir waren zu viert (ja, wir sind nicht mehr zu dritt!), Und nach der Idee nahmen alle eine Boje mit und gingen zu seinem Punkt am Ufer des Teiches, wo er seine Boje vom Ufer an ein Seil legte (damit sie nicht wegsegelten - sie nahmen das Boot nicht). .
Hier an meinem Punkt (Boje Nr. 4) sah es ungefähr so aus:

An der Küste, an der ich mich befand, gab es zwei bequeme Ansätze. Meine beiden Kollegen am gegenüberliegenden Ufer hatten weniger Glück - es gibt einfach einen ziemlich sanften Strand, der mit Schilf bewachsen ist und an einigen Stellen von Fischern mit Füßen getreten wird. Infolgedessen musste die Boje Nr. 3, wie vom Standort aus zu sehen sein wird, sehr weit vom Rest entfernt sein, einfach weil es an diesem Ort ziemlich schwierig war, sich dem Wasser zu nähern.
Der Screenshot unten zeigt, wie die Bojen während des Experiments platziert (ausgelegt) wurden:

Mit Blick auf die Zukunft möchte ich übrigens sagen, dass die Koordinaten der Bojen vom Navigationsempfänger abgerufen und nicht direkt an Land gemessen werden.
Das Foto zeigt sehr deutlich, dass sich links von der bedingten Linie zwischen den Bojen Nr. 1 und Nr. 2 eine Sandbank befindet. So, dass ein Reiher zu Fuß dorthin geht (sie ist ungefähr ein Knie dort), was diesmal nicht funktioniert hat.
Von meinem Posten aus sieht das gegenüberliegende Ufer wie auf dem nächsten Foto aus, und die Person, die links sitzt, gehört uns. Sie hält die Boje Nr. 1 am Seil.

Auf dem gleichen Foto ist unser Boot selbst während des Segelns sichtbar.
So sieht es zusammengebaut neben einer unserer Bojen aus:

Die Bojenkabel mussten kürzer gemacht werden, indem sie mit einem Nylonestrich zum tragenden Auge der Boje gezogen wurden, sonst würde der Emitter einfach auf einem schlammigen Boden liegen. In der normalen Position beträgt der Abstand vom Rand des Wassers zum akustischen Sender der Boje 1,5 Meter. Sie können auch sehen, dass der akustische Navigationsempfänger an einem ausreichend langen Kabel montiert ist. Die Länge beträgt 1,5 Meter. Denken Sie daran, dass in Zukunft einige Merkmale der Ergebnisse erläutert werden.
Der Einfluss eines frei baumelnden Zylinders auf die Bewegung des Bootes ist sehr bedeutend. Tatsächlich wurde der Wenderadius der bereits unanständigen 3-4 Meter furchterregend: Bei ruhigem Wasser dauert das Wenden 10-15 Meter. Meine Versuche, das Boot bei leichtem Seitenwind auf Kurs zu halten, werden auf den resultierenden Spuren sichtbar.
Apropos Tracks. Vor dem Experiment gab es keine 100% ige Gewissheit, dass das System unter solchen Bedingungen im Prinzip angemessen funktionieren würde. Trotzdem sah ich den ersten Punkt auf dem Bildschirm fast eine Minute, nachdem der Empfänger in Wasser getaucht war.
Ich habe das auf dem Bildschirm unserer technologischen Anwendung gesehen, ungefähr so:
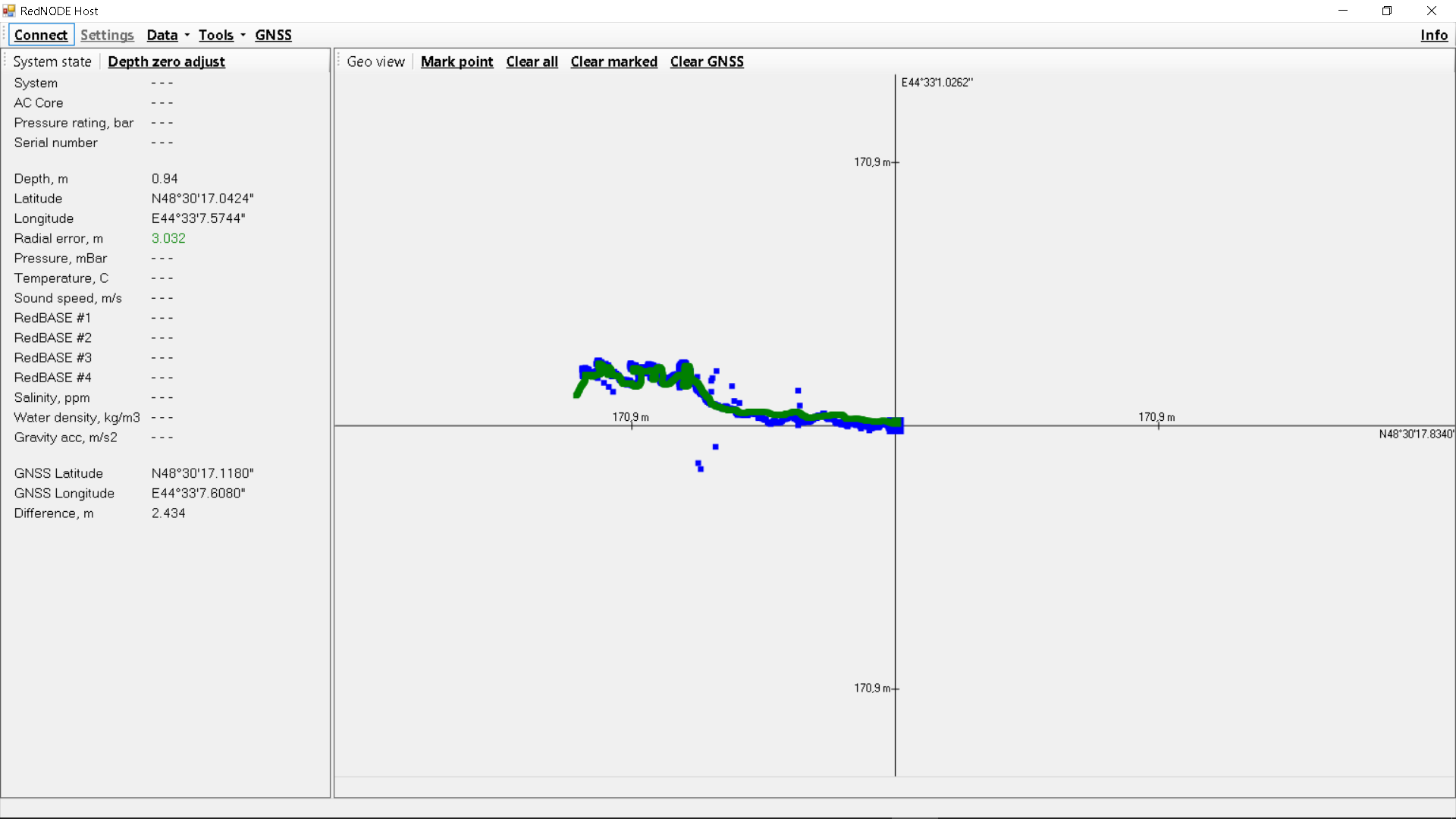
Die Spur vom GPS / GLONASS-Empfänger wird grün und die Spur vom akustischen Empfänger blau angezeigt. In der unteren Zeile im linken Bereich wird der Wert der Differenz in Metern zwischen dem aktuellen Messwert gemäß GPS / GLONASS und dem akustischen Navigationssystem angezeigt. Ich muss sofort sagen, dass der hastig gesammelte Daten- „Kombinierer“ nur einen Teil der Informationen ausgewählt hat, die der Navigationsempfänger sendet, und viele Felder leer geblieben sind.
Und schließlich die daraus resultierenden Tracks in ihrer ganzen Pracht:
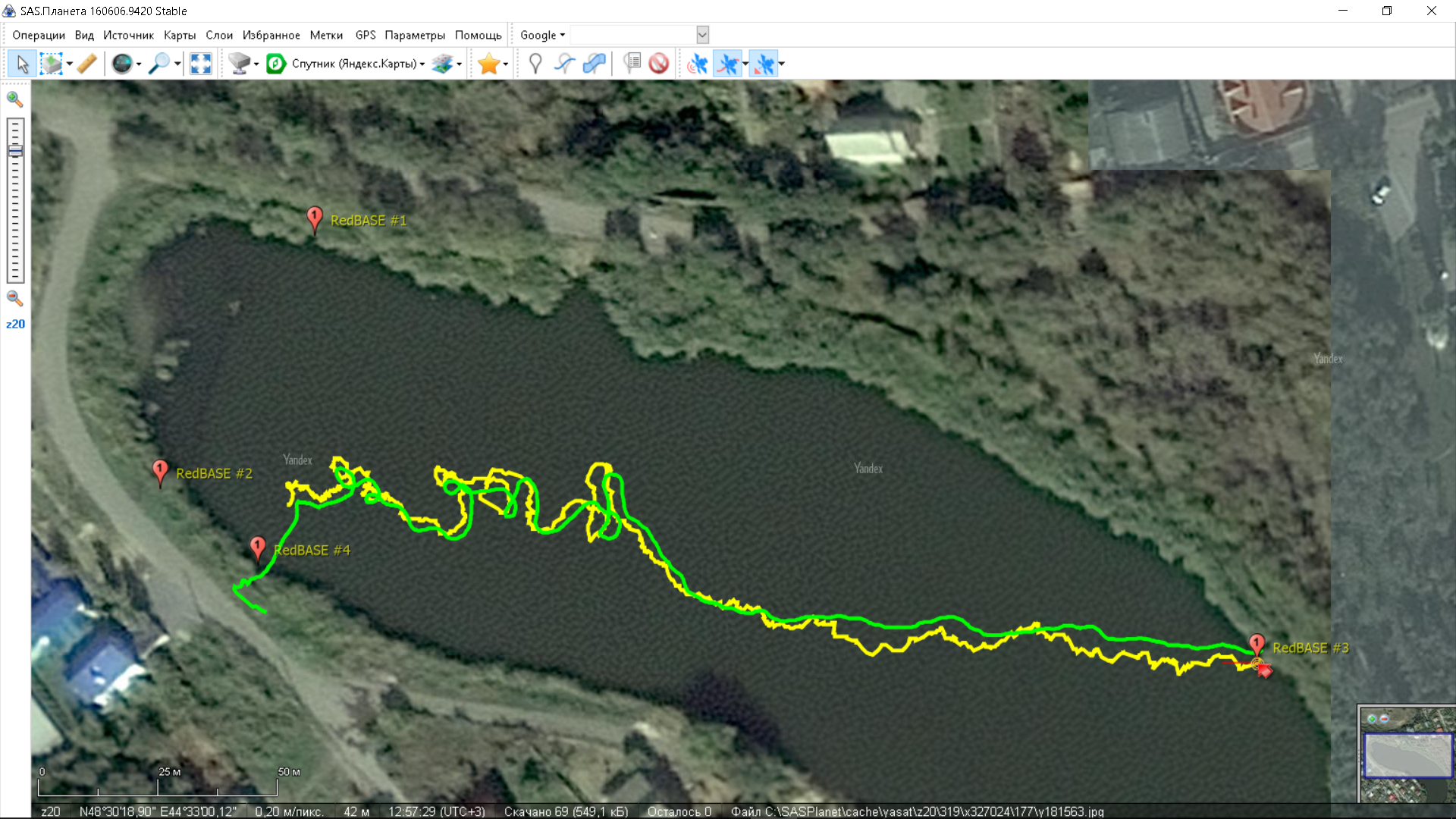
Der maximale Unterschied zwischen den Flugbahnen an verschiedenen Orten beträgt etwa 3 Meter, was zum einen dadurch erklärt wird, dass das Lautsprechersystem wesentlich stärker von der Bewegung des positionierten Objekts auf die Genauigkeit der berechneten Position beeinflusst wird, einfach weil zwischen dem Empfang von Signalen von den Bojen sie schafft es, sich genug zu bewegen, und zweitens die Tatsache, dass der akustische Navigationsempfänger an einem 1,5 m langen Kabel hinter dem Boot baumelte, mit allen daraus resultierenden Konsequenzen.
Wiederholungen der Flugbahn mit einer gewissen Verzögerung, die mit dem akustischen Navigationssystem in den Teilen erzielt wurde, in denen das Boot intensiv manövrierte, sehen sehr charakteristisch aus.
Im Allgemeinen hatten wir aus Angst, das Boot im Schilf zu verlieren, keine so lange Wanderung geplant, aber irgendwann wurde mir klar, dass ich das Schiff wahrscheinlich nicht sicher einsetzen konnte, und ich entschied mich, es in den Wind zu lenken, was es nur zu unserer Boje Nr. 1 brachte. 3, wo es sicher war und von meinem Kollegen gefangen wurde.
Was haben wir aus den Ergebnissen des Experiments?
- Das System arbeitet hydrologisch in einem monströsen Reservoir
- Die Genauigkeit ist vergleichbar mit der Genauigkeit des terrestrischen GPS
- erfordert keine Kalibrierung
- Integriert nicht komplizierter als ein herkömmlicher GPS-Empfänger
- Der Einsatz nimmt nicht viel Zeit in Anspruch (in unserem Fall waren drei Bojen nach 5 Minuten im Wasser und die vierte nach weiteren 10 Minuten, und dann wurde die ganze Zeit damit verbracht, um den Teich herumzukommen).
Es ist unpraktisch, die Tracks anhand des Bildes detailliert anzuzeigen. Daher lade ich die Tracks separat hoch, damit jeder, der interessiert ist, sie analysieren kann:
Tracks RedWAVE 12-05-2017Vielen Dank für Ihre Aufmerksamkeit.
"Und das ist alles für heute!" (C)
Achtung! Update! Wie sich herausstellte, können Sie, wenn Sie dem Link zu unserer
Pfütze folgen, sehen, dass eine Drohne zum Zeitpunkt des Schießens des Gebiets angeblich direkt über dem Ort unserer Experimente geflogen ist:
