
Roboter-Exoskelette werden als die Zukunft der Industrie, der körperlichen Rehabilitation und der Hilfe für ältere Menschen angesehen, aber die Fortschritte in diesem Bereich sind langsam. Dank der
Erfindung von Forschern des College of Engineering der Carnegie University - Mellon kann sich jedoch alles ändern. Sie entwickelten ein Rückkopplungssystem, das die Bewegung von Robotergliedern mit menschlichen Schritten in Einklang bringt.
Eine Stunde lang überwacht das System die Atmung des Trägers - und ändert iterativ 32 Exoskelett-Modi, bis der optimalste gefunden wird.
Die Ermittlung des optimalen Leistungsmusters von Exoskelettmotoren beim Gehen ist eine schwierige Aufgabe. Jede Person hat ihre eigenen Gangmerkmale, und die Merkmale der Schritte hängen von vielen Bedingungen ab, einschließlich der Oberfläche, auf der die Person geht. Um dieses Problem zu lösen, verwenden Ingenieure die Brute-Force-Methode, wenn das System verschiedene Zeitpunkte und Leistungen testet, um den optimalen Modus zu finden, der den größten metabolischen Nutzen bietet. Um den metabolischen Nutzen zu messen, müssen Sie jedoch wiederholt den Atem des Trägers messen, was wiederum die Anzahl der Einstellungen verringert, die während der Brute Force getestet werden können. Das heißt, es ist schwierig, hier das optimalste Verfahren zu organisieren.
Eine Gruppe von Forschern des College of Engineering der Carnegie University - Mellon beschreibt in seinem
wissenschaftlichen Artikel einen Algorithmus, der das Drehmomentmuster aller Exoskelettmotoren während eines einstündigen iterativen Prozesses mit Echtzeitschätzungen der Stoffwechseleinsparungen optimiert. Das Exoskelett passt sich buchstäblich der Person an und verfolgt seine Atmung.
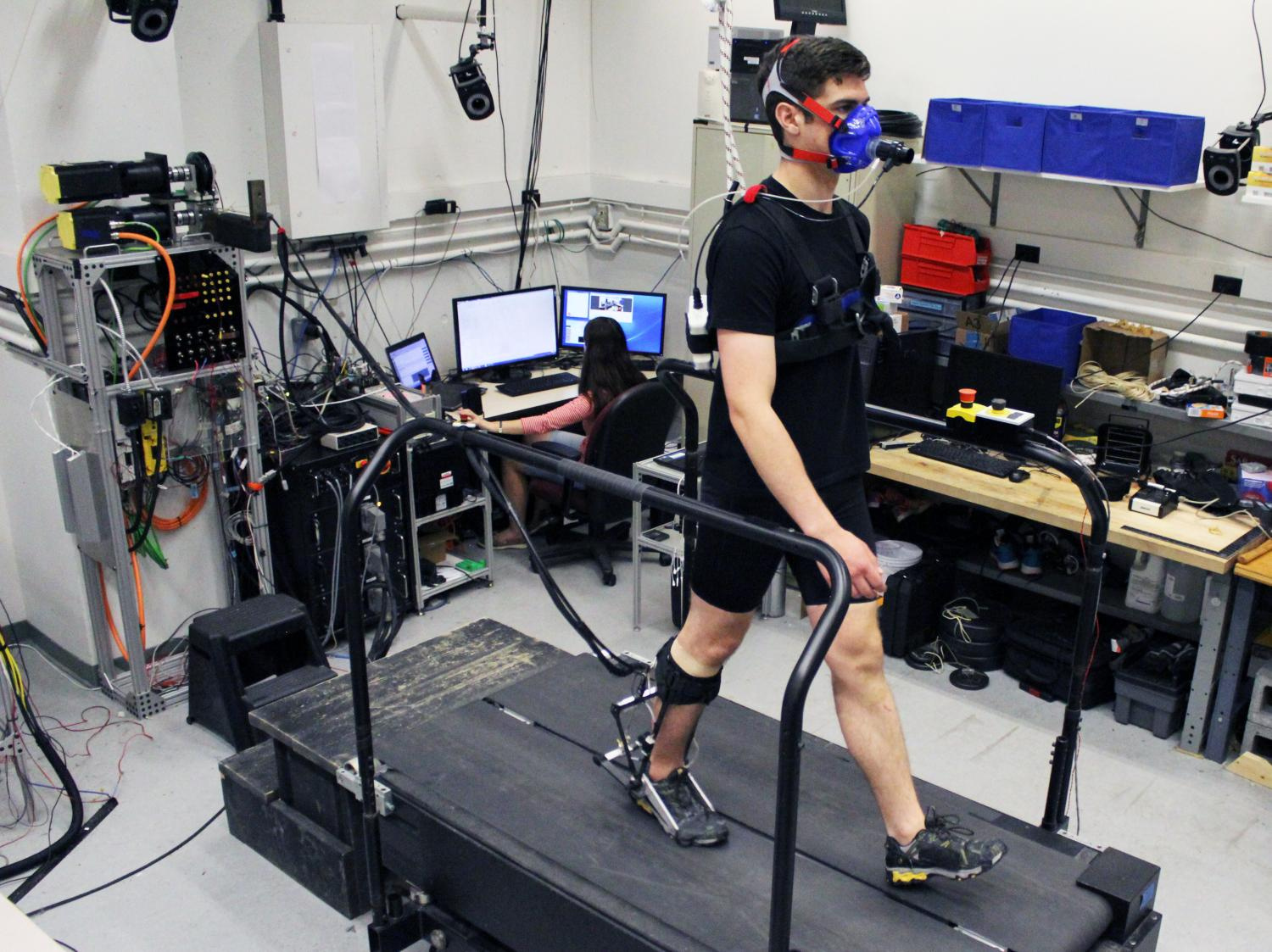
Bei wissenschaftlichen Tests eines iterativen Systems mit einer Person „mitten in einem Zyklus“ an mehreren Freiwilligen zeigte das System eine durchschnittliche Stoffwechselersparnis von 24,2 ± 7,4% im Vergleich zum Gehen bei ausgeschaltetem Exoskelett. Das heißt, eine Person verbraucht ungefähr ein Viertel weniger Energie, wenn sie ein Exoskelett benutzt. Diese Reduktion ist etwas besser als die Ergebnisse anderer Forschungsgruppen, aber dies sind sehr gute Zahlen, da das Exoskelett nur für ein Bein verwendet wurde.
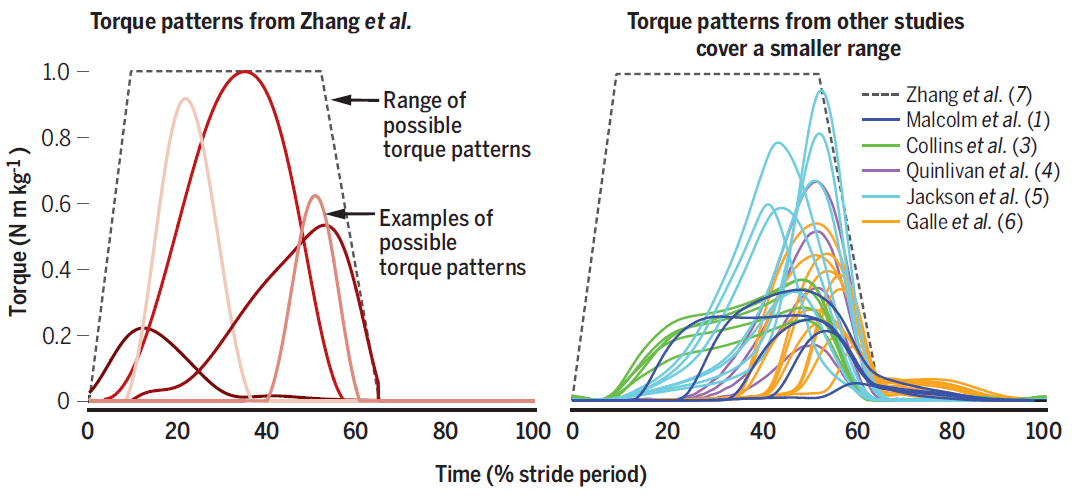
Darüber hinaus wurden nach Optimierung des Algorithmus die Ergebnisse auf demselben Exoskelett verbessert. Vor allem aber ist ein solches Training viel schneller als die Anwendung von Standard-Brute-Force, und das wurde in anderen Studien gezeigt. Auf diese Weise können Sie während der Brute Force verschiedene Betriebsarten ausprobieren (siehe Grafiken).
Ein solches interaktives Schema mit ständiger Überwachung der menschlichen Atmung (Human-in-the-Loop) ermöglicht es Ihnen, sich an den aktuellen Zustand einer Person anzupassen, an ihr Gehen unter den aktuellen Bedingungen.
Warum war diese Methode der Anpassung an das Gehen einer Person effektiver als andere Methoden? Seit den 1970er Jahren haben Wissenschaftler gezeigt, dass es die variable Praxis ist, die zum Erwerb von Fähigkeiten beiträgt. Zuvor war man der Ansicht, dass das Training unter konstanten, unveränderlichen Bedingungen durchgeführt werden sollte. Grob gesagt muss eine Person dasselbe viele Male wiederholen, um es zu lernen und eine Fähigkeit zu erwerben. Aber nein. Wie sich herausstellte, sollte die Praxis variabel sein: Die Bedingungen sollten sich ändern - so geht der Erwerb von Fähigkeiten viel schneller. Seitdem wird in der Medizin, im Sport und in der Berufsausbildung variable Praxis angewendet. Der Algorithmus der Ingenieure an der Carnegie University - Mellon scheint dieses Prinzip zu verwenden, das seit langem zur Aufklärung der Menschen verwendet wird. Die hier gezeigten Stoffwechseleinsparungen werden durch eine Kombination aus effektiver Drehmomentoptimierung und menschlicher Anpassung an eine Vielzahl von Drehmomentmustern erzielt, die dabei sortiert werden.
Die Autoren der wissenschaftlichen Arbeit schlagen vor, dass es auf diese Weise möglich ist, die Rückkehr der vollmotorischen Fähigkeiten zu Patienten zu beschleunigen, bei denen diese Fähigkeiten beispielsweise nach Schlaganfällen beeinträchtigt sind. Die Variabilität des Drehmoments des Exoskeletts bietet eine solche variable Lernumgebung, in der sich die Fähigkeiten des Patienten viel schneller erholen. Es ist, als würde man über unwegsames Gelände laufen, das die Beine viel besser trainiert als auf einem flachen Laufband. Anstatt jeden Tag mit der gleichen Anstrengung zu gehen, muss sich eine Person anpassen, Geschwindigkeit und Anstrengung ändern: Dies wird ein wirklich effektives Training sein.

Darüber hinaus planen Wissenschaftler, sich eine weitere Aufgabe zu stellen. Wenn nun das Hauptziel darin bestand, das metabolische Gleichgewicht (dh die banale Energieeinsparung) beim Gehen zu retten, können sie sich in Zukunft ein neues Ziel für die Optimierung setzen: Geschwindigkeit. In den vergangenen Jahren haben wissenschaftliche Studien gezeigt, dass Exoskelette die durchschnittliche Geschwindigkeit einer Person beim Gehen tatsächlich erhöhen können. Es ist Zeit zu prüfen, ob dies möglich ist, ohne das Stoffwechselgleichgewicht zu beeinträchtigen.
In jedem Fall funktioniert das interaktive Exoskelett, das die Atmung des Wanderers und sein Stoffwechselgleichgewicht überwacht, nach einem bestimmten Programm - ist das nicht die Zukunft? Selbst ein gesunder Mensch würde ein solches Gerät nicht ablehnen. Im normalen Modus erleichtert das Exoskelett beispielsweise das Gehen. Wenn Sie jedoch zu spät zu einem Meeting kommen, drücken Sie die Turbo-Taste, und das Exoskelett beginnt im Geschwindigkeitsprioritätsmodus zu arbeiten.
Der wissenschaftliche Artikel wurde am 23. Juni 2017 in der Zeitschrift
Science veröffentlicht (doi: 10.1126 / science.aan5367).