Jeder kennt das Raspberry Pi-System, das zu Recht nicht nur von der professionellen Bruderschaft, sondern auch von selbstgemachten Singles anerkannt wurde. Jetzt sprechen wir über ein weiteres interessantes Projekt auf dem Gebiet der Robotik.
Veterobot ist ein kleiner Geländeroboter, dessen Besonderheit die Offenheit der Fertigungstechnologie und -software ist.

Ein kleiner, ordentlicher Roboter ist buchstäblich mit Sensoren vollgestopft und verfügt über eine ziemlich leistungsstarke Prozessoreinheit. Der Kern des letzteren ist der Bordcomputer BeagleBoard-xM. Dies ist ein offenes System mit dem ARM-Prozessor von Texas Instruments. Seine Leistung reicht aus, um Peripheriegeräte zu steuern, komplexe Algorithmen auszuführen und sogar Videos im H-264-Format in Echtzeit (mithilfe von DSP) zu komprimieren. Letzteres ist sehr wichtig, da sich an Bord des Geräts zwei Videokameras befinden, mit denen die Bewegung gesteuert werden kann.
Im Allgemeinen verfügt die Befüllung des Roboters zunächst bereits über vier Ultraschall-Entfernungsmesser, einen digitalen Kompass, GPS und Videokameras. Die Verwaltung kann über WLAN oder 3G (im Testmodus) erfolgen, und es besteht auch die Möglichkeit, den Roboter über das Internet fernzusteuern (hierfür benötigen Sie lediglich Kameras an Bord).
Alle Komponenten des Geräts sind offen und für alle Ankömmlinge zugänglich. Daher sind die Fähigkeiten dieses Roboters nur durch die Vorstellungskraft des Benutzers begrenzt.
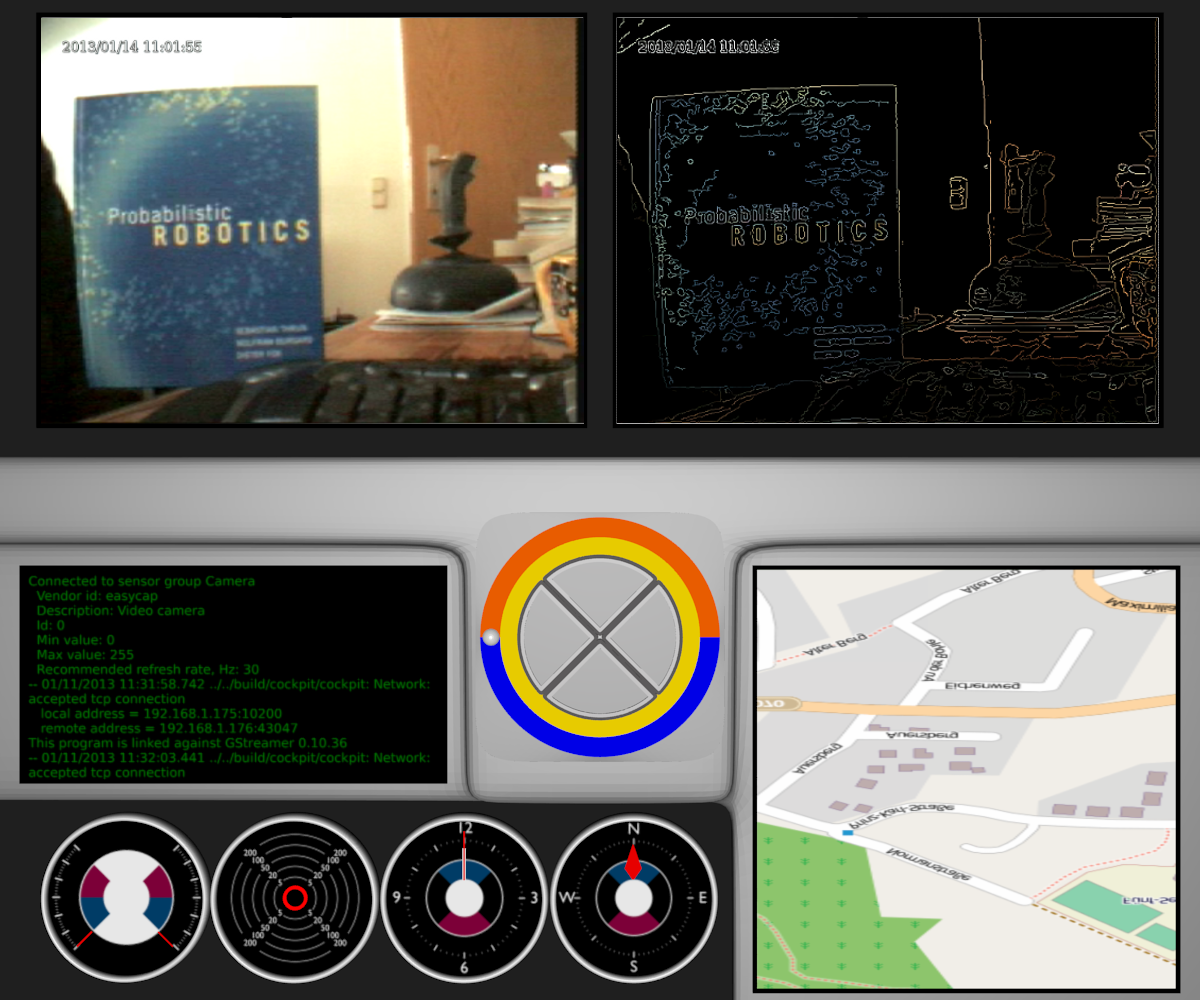
Die Softwarefüllung des Roboters besteht aus einer Mischung aus Angstrom Linux, Xenomai, ZeroCs Ice und anderen Komponenten. Ebenfalls enthalten ist ein spezielles Programm, mit dem Sie das Gerät und die Messwerte der Sensoren steuern können. Das Arbeitsfenster befindet sich im folgenden Screenshot.
Die dreidimensionale Drucktechnologie wird verwendet, um den Fall des Veterobots zu erstellen, und die Modelle selbst wurden im Blender-Programm ausgeführt. Eine Ausnahme bildet das fertige Dagu Rover 5-Chassis, das mit zwei Motoren mit Winkelsensoren ausgestattet ist. Es ist jedoch wahrscheinlich, dass andere Komponenten an das Gerät angeschlossen sind. Zumindest in der
3D-Präsentation des Roboters besteht die Möglichkeit, das Chassis zu wechseln, obwohl ich dies auf der Website nicht erwähnt habe. Die Anwendung selbst wurde auch mit der kostenlosen 3D-Engine Blend4Web erstellt (die Präsentation wird in einem Webbrowser geöffnet und verwendet WebGL). Die Quellen befinden sich im allgemeinen Pool des Projekts.

Als Ergebnis haben wir ein interessantes Gerät, das Forschern oder Robotik-Enthusiasten gefallen könnte. Obwohl die Kosten für das Gerät recht hoch sind, stehen seine Komponenten, Schemata, 3D-Modelle usw. im
Git-Hub- Repository zum Download zur Verfügung, und die Site selbst enthält Anweisungen zur Selbstorganisation.
PS Der Autor des Artikels hat nichts mit den Entwicklern des Geräts zu tun.