Flexible Endoskope sollen an die unzugänglichsten Stellen des menschlichen Körpers klettern. Nicht aus Neugier - sondern zum Wohle des Patienten. Unabhängig davon, was der Chirurg mit einem Endoskop sieht, kann er es nicht mit demselben Endoskop extrahieren oder abschneiden. Daher muss man sowohl im wörtlichen als auch im übertragenen Sinne auf die andere Seite gehen und durch Schnitte an seinem Körper in den menschlichen Körper klettern.
Eine Gruppe von Wissenschaftlern aus Harvard beschloss, das Endoskop mit einem Roboterarm zu kombinieren, um Operationen sozusagen direkt „vor Ort“ durchführen zu können. Der Manipulator verfügt über mehrere Freiheitsmodi sowie die Möglichkeit, bestimmte Objekte oder Gewebe zu löschen. Der Manipulator versteckt sich im Endoskop, während er auf das Ziel zugeht. Und sobald der richtige Ort erreicht ist, kommt die Rolle des Roboruk.
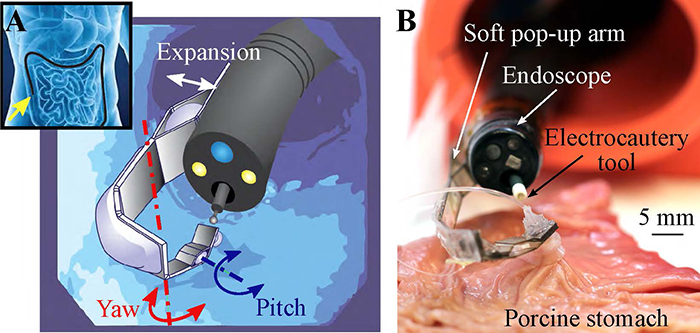 Illustration zur Beschreibung des Konzepts des Manipulators und ein Foto des Roboterarms selbst. Rechts führt der Manipulator eine Operation direkt im Magen-Darm-Trakt durch. Dies sind nur "Feldversuche", aber sie sehen immer noch beeindruckend aus.
Illustration zur Beschreibung des Konzepts des Manipulators und ein Foto des Roboterarms selbst. Rechts führt der Manipulator eine Operation direkt im Magen-Darm-Trakt durch. Dies sind nur "Feldversuche", aber sie sehen immer noch beeindruckend aus.Generell finden Softroboter ihre Anwendung in vielen Bereichen der Wissenschaft, Technologie und Medizin. Die Merkmale ihres Designs sind so, dass ein Arzt (schließlich handelt es sich um Ärzte) sie mit einem hohen Maß an Effizienz im menschlichen Körper verwenden kann. Die Fähigkeiten von Robotern sind zwar begrenzt.
„Auf Millimeter-Ebene werden weiche Geräte wirklich weich, so dass sie keine Art von Stoff beschädigen können, aber sie können auch keine Operationen mit diesem Stoff durchführen. Dies schränkt die Anwendung von weichen Mikrosystemen für die medizinische Arbeit ein. Die Frage ist, ob wir weiche Roboter entwickeln können, die ausreichende Anstrengungen entwickeln können, ohne die Sicherheit zu gefährden “, kommentierte Tomazzo Rantsani, einer der Entwickler des Projekts.
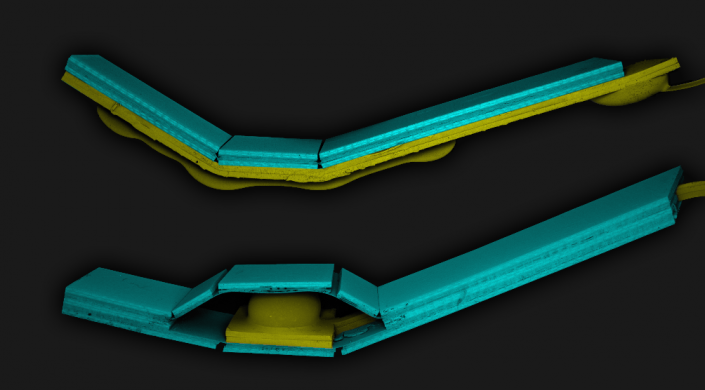
Dem Team gelang es, ein Arbeitsmodell des Manipulators unter Verwendung eines ausreichend starken und elastischen "Skeletts" zu erstellen, das von weichen Materialien umgeben ist. Wissenschaftler sagen, dass sie sich bei der Herstellung ihrer Roborouki an den Prinzipien der Herstellung von Origami-Papierfiguren orientierten. Wie oben erwähnt, kann der Manipulator zum Ziel gelangen, dort eine völlig andere Form annehmen und tatsächlich den Manipulator drücken. Danach kann der Chirurg die Operationen durchführen, die er benötigt.
Um das gesamte System in Bewegung zu setzen, entschieden sich die Wissenschaftler für die Verwendung von Aktuatoren, die mit Wasser arbeiten. Sie verbinden sich mit den starken Bestandteilen des Skeletts über chemische Bindungen, so dass keine zusätzlichen Klebebefestigungen (oder andere Arten von Befestigungselementen) erforderlich sind. Die Werkzeugliste enthält einen Manipulator und einen Saugnapf, die nach dem gleichen Prinzip wie die Saugnäpfe von Kopffüßern funktionieren. Wissenschaftler führten eine Testoperation in einer künstlichen Speiseröhre unter Verwendung von Schweinegewebe durch. Das Experiment war erfolgreich, der Manipulator führte die Operation durch, ohne das empfindliche Gewebe zu beschädigen, alles wurde auf die bestmögliche Weise durchgeführt.
Die neueste Version des Manipulators konnte Operationen mit Miniaturobjekten ausführen, deren Größe einige Millimeter nicht überschreitet. Zusätzlich zu anderen Elementen ist der Roboruk mit einem Rückkopplungssensor ausgestattet, damit der Chirurg, der eine Operation oder Untersuchung des Patienten durchführt, sich ein Bild über den Aufwand machen kann, der zur Durchführung eines Verfahrens erforderlich ist. Dies kann eine der Voraussetzungen für eine erfolgreiche Operation sein.
In Zukunft planen Spezialisten, die Operation bereits unter realen Bedingungen durchzuführen, höchstwahrscheinlich jedoch nicht an einer Person, sondern an einem Tier. "Unsere Technologie ermöglicht es uns, kleine weiche Roboter zu entwickeln, die in der Medizin benötigt werden."
Weiche Roboter werden nicht nur in der Medizin, sondern auch in der Produktion benötigt. In jüngerer Zeit
zeigten Wissenschaftler der Wissenschaftlich-Technischen Universität von China
einen weichen pneumatischen Manipulator , der wie eine Raupe aussieht. Dieses System wurde übrigens auch in Zusammenarbeit mit Wissenschaftlern aus Harvard entwickelt.
Dieser Robotertyp kann verschiedene Objekte erfassen und tragen, auch schwere, dem Zeiger folgen und andere Aufgaben ausführen. In Zukunft planen die Chinesen, ihren Roboter nicht nur für das Erfassen, sondern auch für den Einsatz von Werkzeugen zu trainieren, um sie auf eine bestimmte Entfernung zu bringen.