Das erste im Handel erhältliche UKB-System für akustische Unterwasser-Navigationssysteme für den Hausgebrauch
Wir verlieren nicht an Tempo. Seit der Veröffentlichung unseres vorherigen Artikels,
Unterwasser-GPS: Die Fortsetzung war fast ein Sommer, und heute werde ich Ihnen erzählen, was wir die ganze Zeit gemacht haben.
Im ersten Artikel über unser
Unterwasser-GPS haben wir einen kurzen Überblick über vorhandene Positionierungssysteme und insbesondere die Unterwasserakustik gegeben.
Unter dem Schnitt werde ich darüber sprechen, wie wir ein ultrakurzes Basissystem hergestellt haben.
Im Jahr 2015 haben wir uns geschworen, uns jemals mit UCB-Systemen (USBL - Ultrakurzbasis) zu befassen. Das Wesentliche dieser Systeme ist das Vorhandensein einer Signalquelle (z. B. Beacon-Transponder) und einer Antenne, die die Ankunftsrichtung des Signals bestimmt. Phased Array oder einfach: Peilantenne.
Viele unserer Benutzer sprachen auf die eine oder andere Weise über die relativen Unannehmlichkeiten des Float-Platzierungsverfahrens und dass die Koordinaten „unten“ (wie in unserem Unterwasser-GPS) berechnet werden.
Manchmal möchten Sie
immer ein Leuchtfeuer an einem positionierten Objekt (einem Taucher oder TNPA / ANPA) befestigen und die Position relativ zum Oberflächenkontrollpunkt (Boot, Pier usw.) bestimmen, indem Sie die USBL-Antenne ins Wasser absenken. In Bezug auf die einfache Bereitstellung ist es das bequemste und einfachste System. Beispielsweise ist das in unserem ersten Artikel erwähnte MicronNAV ebenso wie
dieses ein typisches USBL-System. Der berüchtigte fabelhafte NaviMate war theoretisch auch als UKB-System geplant: Eine schwimmende Boje sollte Taucher anleiten, ihren absoluten Standort berechnen und an sie zurückgeben.
Richtungssuchantenne Sache ist ziemlich häufig. Zum Beispiel haben U-Boote konforme Antennenarrays, die Tausende einzelner Wandler enthalten. Natürlich kann nicht gesagt werden, dass niemand in Russland UKB-Systeme vor uns gemacht hat. Soweit wir wissen, ist unser System jedoch das erste im Inland erhältliche System (und im Allgemeinen das günstigste!).
Aber nichts in diesem Universum ist frei. Der Einfachheit halber müssen Sie bezahlen. Laut unserem Kollegen, der den Betriebsalgorithmus für das Peilsystem entwickelt hat und der Autor der Peilungsantennen-Firmware ist:
„Der UXB-Benutzer wird die einfache Bereitstellung genießen ... die ersten 10-15 Minuten. Genauso viel, wie es für die Platzierung von Bojen eines Systems mit langer Basis im Wasserbereich erforderlich wäre. "
Tatsache ist, dass ein Fehler bei der Schätzung der Ankunftszeit um 1-2 Meter in einem System mit langer Basis nicht viel Wetter verursacht, da ± 1 Meter ein durchaus zulässiger Fehler bei der Positionierung von Tauchern oder Robotern ist.
Der Fehler bei der Definition des „ersten“ oder „direkten“ Strahls im Fall des UHF-Systems führt zur Bestimmung der Ankunftsrichtung einer Reflexion (oder der Summe der Reflexionen - „Strahlen“), kann jedoch von überall kommen, alles hängt von der spezifischen Wasserfläche ab. Dies betrifft insbesondere die Bestimmung des Vertikalwinkels. Fangen Sie eine Reflexion von der Oberfläche oder von unten ein und jetzt haben Sie einen Wertebereich im Bereich von 90 Grad, und dies ist ein mittelmäßiges Navigationssystem.
In modernen Systemen (und auch in unseren) wird der vertikale Winkel nicht berücksichtigt. Stattdessen verfügt das Transponder-Beacon über einen eingebauten Tiefensensor und kann seine Tiefe auf Anfrage der Peilantenne übertragen. In Kenntnis des Tiefenunterschieds und des Neigungsbereichs wird der Abstand entlang der Oberfläche trivial aus dem Satz von Pythagoras bestimmt.
Darüber hinaus steht die Aufgabe, die Antenne selbst zu positionieren, separat. Wenn es von einem Stützschiff oder von einem Pier auf ein Kabel abgesenkt wird, baumelt es und dreht sich in Wellen und Strömungen. Wenn dementsprechend der Ankunftswinkel des Signals im Antennenkoordinatensystem bestimmt wird und es instabil ist, geht diese Instabilität in den berechneten Ort des positionierten Objekts über.
Um solche Probleme zu vermeiden, wird die Antenne häufig an einer Stange montiert. Wir tun dies auch, obwohl unsere Antenne über ein integriertes AHRS verfügt.
Wir haben unser System Zima genannt.
In naher Zukunft planen wir die Veröffentlichung einer verbesserten Version namens Zima blizkoUnser System besteht aus der richtungsweisendsten Transceiver-Antenne Zima-B (ase). Es ist auf dem Foto unten zu sehen.
 Abbildung 1 - Zima-B - Peilantenne auf einer Stange montiert
Abbildung 1 - Zima-B - Peilantenne auf einer Stange montiertUnd Beacons-Responder Zima-R (Esponder), die sowohl eigenständig als auch mit einem Akkupack (wie auf dem Foto) ausgestattet und mit dem Träger verbunden sein können.
In diesem Fall stehen dem Benutzer alle unsere Innovationen und Annehmlichkeiten zur Verfügung:
- die Fähigkeit, bis zu 32 Fernsteuerungsbefehle zu übertragen
- gegenseitige Messung des Abstands zur Peilantenne
- Übertragung des Azimuts zur Basisstation (wenn sich auf den Medien ein Gerät befindet, das die Richtung nach Norden bestimmt - ein Kompass bei den einfachen Leuten)
Das Transponder-Leuchtfeuer hat den gleichen Formfaktor wie unser Unterwasser-GPS-Empfänger RedNODE. Wie bereits erwähnt, verfügt es über einen eingebauten Druck- / Temperatursensor für einen Bereich von 0 bis 30 bar und ermöglicht eine Genauigkeit von bis zu 0,05 m Tiefe und bis zu 0,1 Grad Temperatur. Die Antenne ist übrigens auch mit dem gleichen Sensor ausgestattet, da es irgendwie nicht innovativ ist, die Tiefe per Kabel zu messen.
 Abbildung 2 - Zima-R - Beacon-Transponder (mit Akku)
Abbildung 2 - Zima-R - Beacon-Transponder (mit Akku)Wir haben die allgemeinen Tests des Systems am 3. August dieses Jahres am Pichuga-Fluss in der Region Wolgograd in der Nähe der Stelle durchgeführt, an der es in den Wolgograd-Stausee fließt. Dies ist unser bevorzugter „Trainingsplatz“, wir kennen alle Gruben und Profilelemente persönlich.
Ende Juli und Anfang August ist das Wetter normalerweise sehr heiß. Eine erhitzte obere Schicht erscheint auf den Reservoirs (eine
Thermokline tritt auf), das Wasser beginnt zu blühen, im Allgemeinen werden die Bedingungen schwierig. Nur in solchen und müssen Geräte testen. Schließlich interessiert sich niemand für die Eigenschaften, die Sie in einem perfekt ertrunkenen Messbecken erhalten haben. Jeder arbeitet in echten Gewässern.
Foto des Arbeitsmoments für atmosphärisch:
 Abbildung 3 - Technischer Direktor, Chefdesigner des USBL-Systems, F & E-Direktor (von links nach rechts) =)
Abbildung 3 - Technischer Direktor, Chefdesigner des USBL-Systems, F & E-Direktor (von links nach rechts) =)Eine Antenne kann mit 23 Transpondern arbeiten (obwohl ich mir eine solche Aufgabe nur schwer vorstellen kann, aber immer noch). Beacons sind durch Code getrennt und werden nacheinander bearbeitet.
Das folgende Bild zeigt einen Screenshot des Hosts (Fernbedienungssoftware):
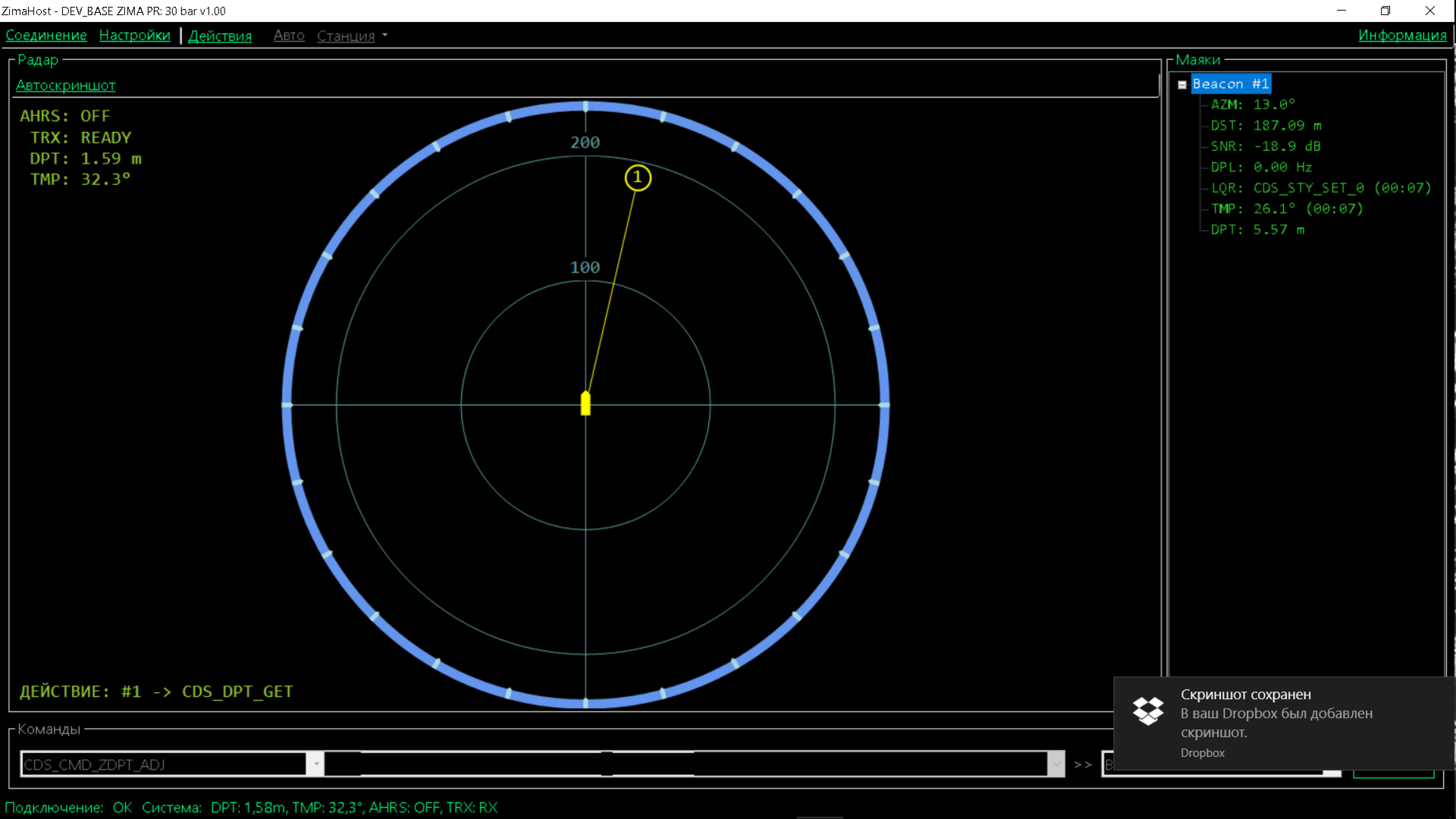
Abbildung 4 - Screenshot des Zima USBL-Hosts
Die Antenne ist über den UART-USB-Adapter mit dem PC verbunden. Traditionell verwenden wir das NMEA0183-ähnliche (offene) Protokoll und alle Quellcodes der Hosts sind auf
Github geöffnet.
Bitte beachten Sie: Der Screenshot zeigt, dass sich der Leuchtturm in einer Tiefe von 5,5 Metern befindet, die Wassertemperatur an seinem Sensor 26,1 ° C (!) Und an der Antenne selbst, die eineinhalb Meter von der Oberfläche entfernt hängt, 32,3 ° C (CARL!) Die Tiefe des Ortes in diesem Bereich beträgt etwa 15-20 Meter.
Bei externen Einstellungen benötigt das System nur den Salzgehalt (aus dem die Schallgeschwindigkeit durch die Messwerte für Tiefe und Temperatur bestimmt wird) und die maximale Entfernung (die maximale Wartezeit für die Reaktion des Beacons wird daraus berechnet). Gemäß unserer Methode (für die ein Patent angemeldet ist) kann der Leuchtturm auch den Abstand zur Antenne bestimmen und unterstützt die Funktion der Ferneinstellung des Salzgehalts des Wassers von der Basisstation aus.
Und schließlich ist das Wertvollste, was wir in diesem Experiment erhalten haben (außer beim Bräunen), ein 7-minütiges Video (Screenshot) des Hosts:
ZimaHost - VideoLassen Sie mich erklären, dass der Leuchtturm bewegungslos zwischen Anker und Boje gespannt war und die Antenne an der Stange an der Seite des (Gummi-) Bootes hing. Relativität der Bewegung sozusagen persönlich: Der Leuchtturm macht eine schnelle Ehrenrunde mit einem Radius von mehr als 100 Metern, die tatsächlich durch die Rotation des Bootes und folglich der Antenne verursacht wird.
Wir haben immer etwas zu erzählen. Wenn etwas unverständlich oder schlecht offenbart schien - willkommen im Kommentar. Meine Kollegen und ich werden die Dinge regeln.
PS In diesen Tests haben wir nicht nur das Zima-System getestet, sondern auch einige andere interessante Geräte, über die ich so früh wie möglich schreiben werde.
Warten auf dich:
- Stimme des Präsidenten nach 700 Metern Cyanobakterien
- Fall für das Anrufen von Tauchern
- Rätselbild (gerade jetzt!)
Versuchen Sie auf dem Foto zu erraten, um welche Art von Gerät es sich handelt und warum es benötigt wird: