NAP * - Core Independent Peripheral
Frühere Artikel zu Core Independent Peripherals Mikrocontroller in Schaltnetzteilen
Teil 3
In den vorherigen Abschnitten ( Teil 1 , Teil 2 ) wurde erläutert, wie Sie mit den kernunabhängigen Mikrochip-Mikrocontroller-Peripheriegeräten PWM-Controller für Schaltnetzteile aus "Bausteinen" erstellen können, indem Sie Verbindungen zwischen verschiedenen Peripheriemodulen herstellen. Wenn wir den oben beschriebenen PWM-Controllern neue „Bausteine“ hinzufügen, erhalten wir neue Funktionen. Überlegen Sie, was noch getan werden kann.
Funktionsautomatisierung
Netzteilschutz
Ein wichtiges Thema in der Leistungselektronik ist die Bereitstellung von Schutzfunktionen. Wenn die Rückmeldung unterbrochen wird, kann es vorkommen, dass der Netzschalter für eine ungültige Zeit geöffnet ist.
PIC-Mikrocontroller mit kernunabhängigen Peripheriegeräten (CIP) verfügen über einen Timer mit Limit-Funktion (Hardware Limit Timer, HLT).
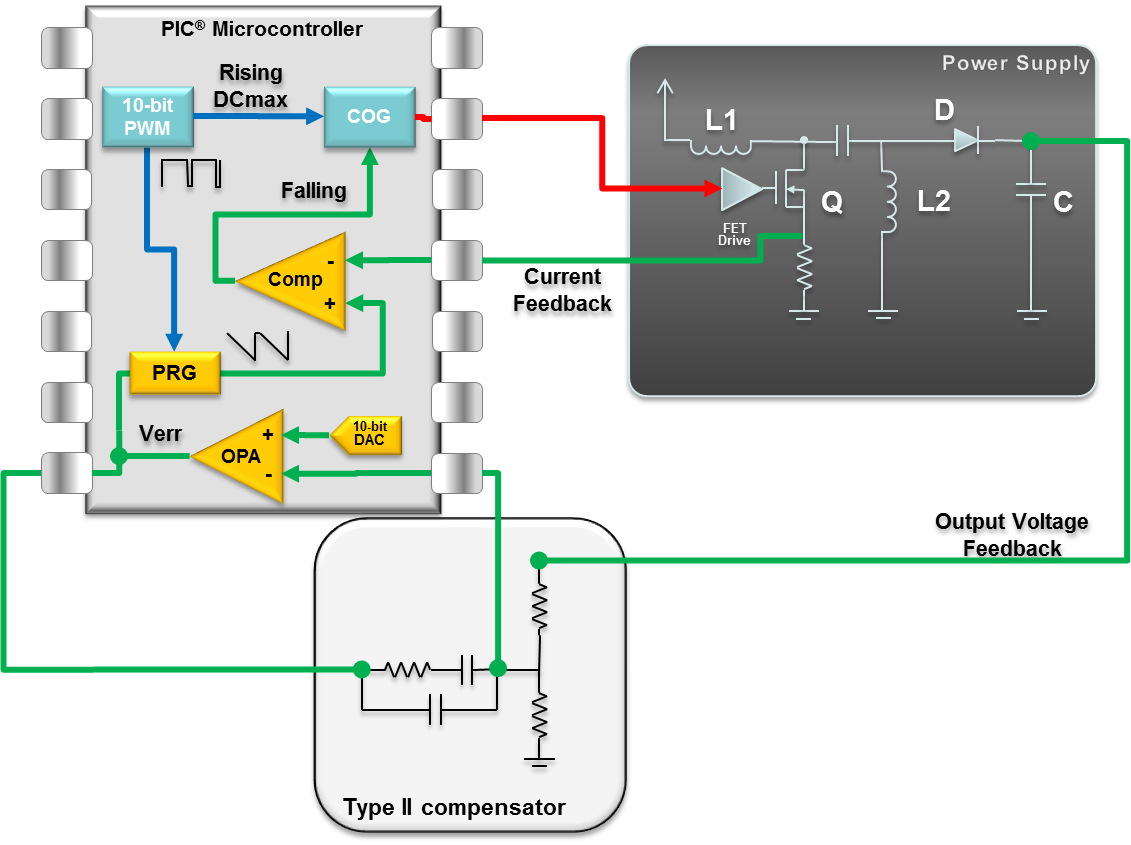
Betrachten Sie ein Beispiel für die Implementierung eines PWM-Controllers mit automatischem Schutz (Begrenzung der Breite des Ausgangsimpulses und der Möglichkeit des automatischen Ausschaltens).

Abb. 3.1. PWM-Controller
Timer HLT1 - legt das Zeitlimit für den offenen Zustand des MOSFET fest; Timer HLT2 - legt die Zeit für den Ausschaltzustand von Toff fest.
COG - Complementary Output Generator - erzeugt MOSFET-Steuersignale.
Algorithmus (Initialisierung der Peripherie des Mikrocontrollers):
- Der HLT2-Zeitgeber initiiert den Einschluss von COG (d. H. Leistungs-MOSFET) und spannt HLT1. Der Strom durch die Induktivität und die Spannung steigt an. Wenn die Spannung mit Vref übereinstimmt, wird der Komparator ausgelöst.
- Im normalen Modus setzt der Komparator COG zurück, gleichzeitig mit COG wird HLT2 (Toff) zurückgesetzt.
- Das Komparatorsignal wird für einige Zeit ausgeblendet, wenn der Netzschalter umgeschaltet wird, wodurch Fehlalarme vermieden werden, die durch Interferenzen auftreten können (in Abbildung 3.1 ist das Ausblendungssignal zur Verdeutlichung des Komparators eingerichtet, die Ausblendfunktion ist jedoch ein Merkmal des COG-Moduls, dies ist jedoch nicht der Fall empfängt das Signal vom Komparator).
Abbildung 3.2 erläutert den Betrieb eines solchen PWM-Controllers.
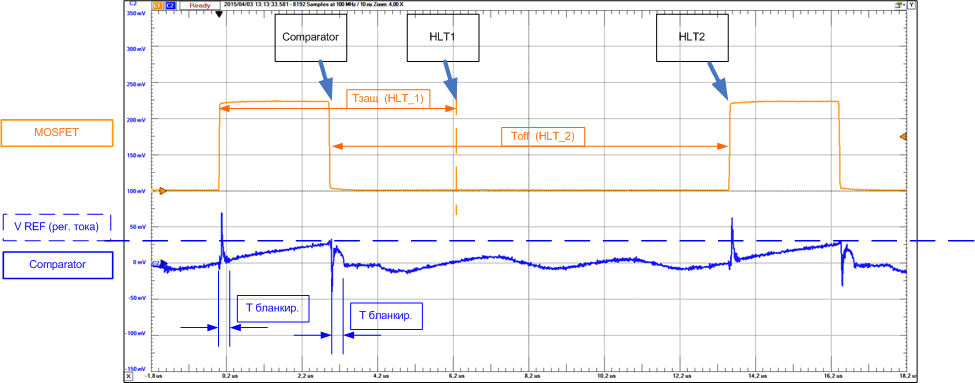
Abbildung 3.2. Spannungsdiagramme zur Erläuterung der Funktionsweise des PWM-Controllers (Abb. 3.1).
Wenn der Komparator während der sicheren Zeit Tzt. Nicht funktioniert, setzt der Grenzzeitgeber HLT1 das COG zurück und begrenzt die Öffnungszeit des Netzschalters. Eine längere Öffnungszeit für den Schlüssel kann eine offene Rückkopplung, eine Fehlfunktion des Leistungstransistors oder eine Induktivität bedeuten.
Das COG-Modul hat eine Funktion zum Blockieren des Betriebs. In diesem Fall kann das Programm es entsperren. Dies kann zur Diagnose verwendet werden. Wenn HLT1 ständig ausgelöst wird, kann das Programm den PWM-Controller ausschalten und eine Fehlfunktion signalisieren.
Sanftanlauf
Wenn während der PWM-Periode Energie in der Induktivität verbleibt, kann dies über mehrere Perioden zu deren Sättigung führen. Gleichzeitig ist zu Beginn der Quelle die Ausgangsspannung Null und die Spannungsrückmeldung funktioniert noch nicht. Das heißt, Es werden Bedingungen für die Sättigung der Leistungsinduktivität geschaffen.
Ein sanfter Start bei der Spannungsregelung kann durch Erhöhen der Induktivität oder durch Bilden eines niedrigen Arbeitszyklus beim Start mit einer weiteren Erhöhung des Arbeitszyklus erreicht werden.
Ein sanfter Start in der Stromregelung kann realisiert werden, indem der Strom der Rückkopplungsschleife beim Starten der Quelle begrenzt wird.
Beispiel: Sanftanlauf mit maximaler Strombegrenzung. Der DAC und der Komparator C2 begrenzen den minimalen Spitzenstrom, die DAC-Spannung steigt programmgesteuert langsam an. Wenn Vout die Norm erreicht, beginnt der C1-Komparator zu arbeiten, durch Unterbrechung können Sie den Sanftanlaufkreis und die Stromgrenze (DAC + Comp2) trennen.

Abb.3.3. PWM-Controller mit Softstartfunktion.
Überspannungsschutz
Durch Hinzufügen eines C2-Komparators zur Analyse der Ausgangsspannung wird das COG-Modul ausgeschaltet, wenn die Ausgangsspannung über die Überspannungsschwelle steigt (Schutz gegen Unterbrechung in der Last, siehe Abb. 3.4).
| Controller ohne Schutz | Ausgangsüberspannungsregler |
|---|
 |  |
Abbildung 3.4
Ebenso ist es möglich, einen Schutz gegen Übertemperatur usw. zu organisieren.
Maximale Arbeitszyklusbegrenzung
Bisher wurde die Implementierung einer solchen Funktion in PWM-Reglern mit Spannungssteuerung in Betracht gezogen. Die Implementierungsoption finden Sie in Abb. 3.1.
Bei Reglern mit Stromregelung im Normalmodus wird die Ausgangs-PWM von der Vorderseite der Eingangs-PWM (Referenz) ausgelöst und vom Rückkopplungssignal - dem Stromkomparator - zurückgesetzt. Um das Tastverhältnis der Ausgangsimpulse zu begrenzen, kann für die entwickelte IPS-Topologie eine Referenz-PWM verwendet werden, deren Tastverhältnis als Maximum ausgewählt wird. Bei Abnahme der Referenz-PWM ist es dann möglich, das COG-Modul zwangsweise zurückzusetzen (siehe Abb. 3.5).

Abbildung 3.5. PWM-Controller mit begrenzten Arbeitszyklus-Ausgangsimpulsen.
Zugriff auf interne Signale und Diagnose
Während das kernelunabhängige Peripheriegerät den PWM-Controller des Schaltnetzteils bildet und die Rückkopplung des Regelkreises schließt, ermöglicht der Mikrocontrollerkern Mess-, Diagnose- und Kommunikationsfunktionen. Der Mikrocontroller ist in der Lage, Spitzen- und Durchschnittsstrom durch Induktivität, ein Sägezahnkompensationssignal, zu messen. Zusammen mit der Messung von Zeitparametern ermöglicht dies dem Mikrocontrollerkern, mathematische Berechnungen durchzuführen und Informationen zu erhalten, die durch direkte Messungen nicht verfügbar sind.
Mit der gemessenen Fehlerspannung Verr, PRG und IL_min können die Ströme ILpeak und IL_avg berechnet werden.
Mit Duty Cycle Measurement und IL_avg-Kenntnissen können Iin_avg und Iout_avg berechnet werden. Mit Vin, Vout, Iin_avg, Iout_avg können Sie die Leistung und Effizienz der Stromquelle bewerten.
Kommunikationsschnittstellen ermöglichen externe Steuerung, Datenübertragung und Diagnoseinformationen. Mit Softwareressourcen können Sie Kommunikationsprotokollstapel implementieren.
Beispielsweise kann der Mikrocontroller in Stromerzeugungssystemen aus alternativen Quellen mit Speicherbatterien verwendet werden, ohne dass spezielle Mikrochips für Energiewandler verwendet werden müssen. Für diese Art der Anwendung werden Energieumwandlung und Batterieladung von einem Mikrocontroller gesteuert. Die Funktionen zum Ermitteln des maximalen Energiepunkts (MPPT) in Solarkonvertern und Kommunikationsprotokollen sind in Software implementiert. Die Benutzerinteraktionsschnittstelle wird über die Eingabe- / Ausgabeports des Mikrocontrollers implementiert. Somit können viele Funktionen eines solchen Systems auf einem einzelnen Mikrocontroller implementiert werden (siehe Abb. 3.6) und nicht mehrere Mikroschaltungen und MK verwenden.

Abbildung 3.6.
Unabhängig vom Kern ermöglichen die Peripheriegeräte eine Reihe anderer Funktionen: Begrenzen des Stroms oder Ausschalten der Quelle während der Überhitzung, Ändern des intermittierenden Strommodus in den Dauerstrommodus usw., Steuern der Reihenfolge des Einschaltens des IIPS, Ausführen eines Frequenzjitters zum Einstellen der Schaltfrequenz und / oder Verringern (Verschmieren) des Interferenzspektrums der Quelle.
Die Implementierung von PWM-Controllern an der MK-Peripherie unabhängig vom Kern für die Implementierung eines einstufigen oder einkanaligen IIP wurde oben diskutiert.
Die Mikrocontrollerfamilien PIC16F176x / 177x verfügen über bis zu 4 Peripheriegeräte des gleichen Typs, von denen jedes für den Aufbau eines Energiewandlers verwendet werden kann. Somit können die Steuerungen dieser Familien der Kern von mehrkanaligen oder mehrstufigen IIP- und Energiewandlern sein.
Mikrocontroller-Programm
Ein IIP mit Implementierung auf einem vom Kern unabhängigen Peripheriegerät erfordert praktisch keinen Eingriff vom Kern des Mikrocontrollers. Die Aufgabe des Mikrocontrollers reduziert sich auf die Erstkonfiguration der Peripherie, wonach die Funktionen / Module durch Rückkopplungssignale autonom arbeiten. Die Steuerung erfordert möglicherweise nur eine minimale Beteiligung an der Verarbeitung und Änderung des peripheren Interaktionsalgorithmus, z. B. während eines Softstarts, Ändern der Quellausgangsparameter, Ausarbeiten von Notfallbedingungen usw.
Daher können der Kern und das Mikrocontrollerprogramm eine Reihe ihrer inhärenten Funktionen ausführen - Steuerung, Bereitstellung einer Schnittstelle mit Steuergeräten, Anzeige von Modi usw.
Auf der Microchip-Website finden Sie die Implementierung der PMbus-, DALI- und DMX-Schnittstellen, die in verschiedenen Systemen mit Energiewandlern weit verbreitet sind.
Debuggen
Zum Debuggen des Systems muss nicht mit dem Layout des Netzteils begonnen werden. Für einige Aufgaben ermöglichen die Ressourcen und Peripheriegeräte des MC, sowohl die Steuerlogik des Wandlers als auch die Rückkopplungssignale der Ausgangswandlertopologie zu emulieren.
| Topologie | Schema |
|---|
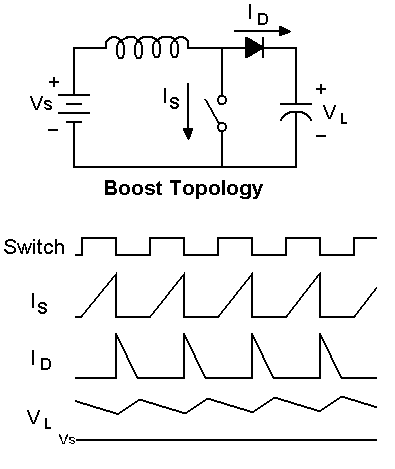 | 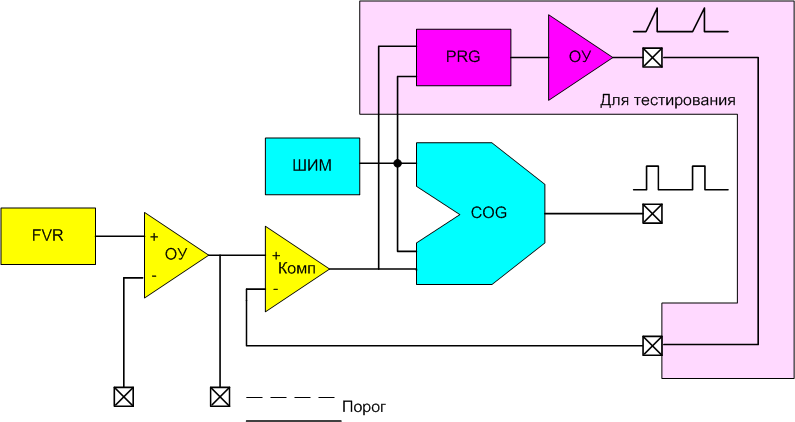 |
Abbildung 3.7. Ein Beispiel für die Bildung eines Sägezahnsignals zum Debuggen eines PWM-Controllers mit Messung des Spitzenstromwerts.
| Schema | Diagramm |
|---|
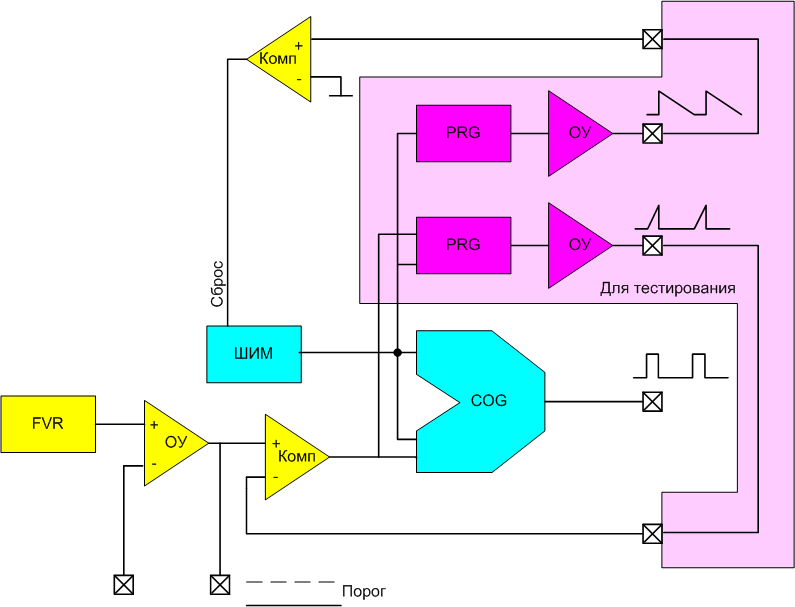 |  |
Abbildung 3.8. Ein Beispiel für die Bildung von Sägezahnsignalen zum Debuggen eines PWM-Controllers mit Messen des Spitzenwerts des Stroms und Erfassen des Nullstroms in der Induktivität.
Zusammenfassung
Die Fähigkeit, Peripheriegeräte flexibel zu konfigurieren, ermöglicht es, denselben MC der allgemeinen Anwendung für verschiedene Aufgaben zu verwenden, einschließlich der Erstellung von PWM-Controllern für Energiewandler.
Vom Kern unabhängige Peripheriegeräte sind an und für sich interessant, aber der größte Vorteil kann aus der Möglichkeit der Synthese von Funktionsblöcken resultieren, d.h. gemeinsame Nutzung mehrerer Peripheriemodule zur Lösung spezifischer Probleme. In diesem Fall bleiben Taktrate, Geschwindigkeit und Bittiefe des Kerns auf der Strecke - der Hardwareteil führt spezielle Funktionen aus, und der Kernel befasst sich mit der Softwareunterstützung des Produkts.
Die für das Studium verwendete und empfohlene Literatur:
- Microchip-Website: http://www.microchip.com/promo/dspic33-gs-digital-power
- Konfigurierbare Logikzellen in PIC-Mikrocontrollern https://geektimes.ru/post/278718/
- Microchip-Mikrocontroller-E / A-Ports. https://geektimes.ru/post/279374/
- TB3119. Technischer Brief zum ergänzenden Ausgangsgenerator. www.microchip.com
- Dynamik und Steuerung geschalteter elektronischer Systeme. Kapitel 2. Pulsweitenmodulation http://www.springer.com/978-1-4471-2884-7
- TB3155. Mehrphasig verschachtelter PWM-Controller mit Diodenemulation unter Verwendung von 8-Bit-PIC-Mikrocontrollern. www.microchip.com
- TB3153. Mit dem programmierbaren Rampengenerator implementierte Beispielfunktionen. www.microchip.com
- Keith Billings, Taylor Morey. SWITCHMODE POWER SUPPLY HANDBUCH
- Marty Brown. Netzteil-Kochbuch.
- AN2122. Flyback SMPS Verwenden eines Mikrocontrollers als Steuereinheit. http://www.microchip.com
- 20097 PC7. Entwerfen intelligenter Stromrichter mit Core Independent Peripherals (CIPs)
Microchip MASTERs Training 2016. - AN2456. Konfigurierbarkeit in einem Schaltnetzteil-Controller. http://www.microchip.com