Science Fiction ist voller fliegender Roboter. Es gibt auch fliegende humanoide Roboter, die nach dem Bild des Menschen geschaffen wurden. Dies sind autonome Maschinen und Exoskelette, die wie Iron Man von innen gesteuert werden. In Wirklichkeit haben wir solche Roboter noch nicht gesehen. Es gibt Multikopter, aber sie können nicht wie eine Person auf dem Boden laufen. Ingenieure des italienischen Technologieinstituts beschlossen, dieses Manko zu beheben - sie entwickelten die
Architektur des fliegenden humanoiden Roboters iCub mit vier Strahltriebwerken und einem Steuerungssystem dafür.
Dies ist einer der ersten Roboter der Welt, der in der Lage ist, Objekte zu fliegen, zu gehen und zu manipulieren, dh sie mit Manipulatoren zu erfassen.
Humanoide Roboter werden traditionell als terrestrische Maschinen angesehen, die sich an der Oberfläche bewegen. Italienische Wissenschaftler sind sich jedoch sicher, dass sich der Anwendungsbereich eines solchen Roboters erheblich erweitern wird, wenn Sie einem solchen Roboter Triebwerke hinzufügen, da er mehr Freiheitsgrade hat. Im Vergleich zu herkömmlichen unbemannten Luftfahrzeugen sind sie manchmal auch mit Manipulatoren ausgestattet, die Objekte erfassen können, aber auch hier hat ein humanoider Roboter einen Vorteil gegenüber ihnen, da er auf dem Boden laufen kann. Dies erhöht die Zuverlässigkeit und Energieeffizienz des Systems.
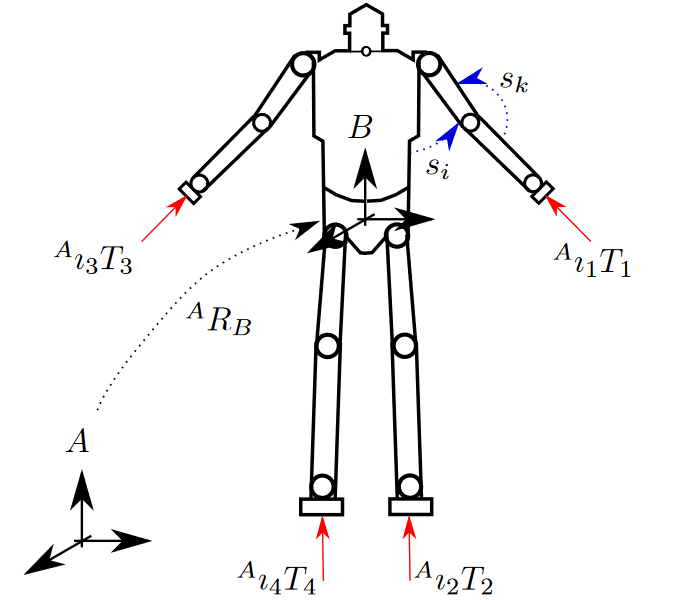
Im Projekt des italienischen Technologieinstituts sind vier Strahltriebwerke an den Terminaleffektoren installiert, dh an den "Armen" und "Beinen" des Roboters. Diese Anordnung der Motoren erscheint etwas unnatürlich, aber tatsächlich wurde eine solche multimodale Schaltung bereits in anderen Konstruktionen getestet. Ingenieure sagen, dass Sie damit die berechnete Flugbahn relativ zum Massenschwerpunkt stabilisieren können, wobei kleine Abweichungen in der Ausrichtung des Roboterstützrahmens berücksichtigt werden.
Die italienische Entwicklung ist weit von der praktischen Umsetzung entfernt. Die Entwickler nennen es "den ersten Schritt zur Entwicklung fliegender humanoider Roboter" und es ist wirklich nur der erste Schritt. Die Ingenieure entwickelten ein Grundgerüst für die Steuerung der
Simulation des iCub-Roboters während eines stationären Schwebeflugs und einer reibungslosen Bewegung. Der Motorschub wird ebenfalls im Simulationsprogramm berechnet und bei der Berechnung des Steuerungssystems berücksichtigt. Diese Arbeit beweist, dass die Erstellung eines solchen Roboters und seine Steuerung
theoretisch möglich sind, obwohl die Entwickler die aerodynamischen Effekte und andere Faktoren, die sich im praktischen Betrieb des Roboters manifestieren können, nicht berücksichtigt haben. Alles wird seine Zeit haben - sowohl solche Berechnungen als auch die ersten Experimente mit realen Flügen werden später sein, aber jetzt bestand die Aufgabe darin, sicherzustellen, dass es theoretisch möglich war, die Bewegung eines solchen Mechanismus in der Luft zu steuern.
Das Video zeigt, wie der Roboter an einer Stelle einfriert und berechnet die gewünschte Flugbahn für seinen Schwerpunkt.
Einer der iCub-Entwickler, Daniele Pucci, sagte gegenüber
IEEE Spectrum, dass er vor vier Jahren auf die Idee gekommen sei, einen solchen Roboter zu entwickeln, als er am italienischen Institut für Technologie arbeitete. Dann überlegte er, wie er seine Entwicklungen auf dem Gebiet der UAV-Steuerung auf Roboter mit verschiedenen "Körperteilen" anwenden sollte, dh nicht auf einen vollständig starren Körper.
Daniele Pucci glaubt, dass humanoide Flugroboter viele Vorteile gegenüber herkömmlichen Multikoptern haben, die mit Robotermanipulatoren ausgestattet sind. Letztere haben bei windigem Wetter häufig Probleme, da sie nicht fest auf dem Boden stehen können und daher eine genauere Steuerung erfordern, wenn sie versuchen, ein stationäres Objekt zu erfassen. Darüber hinaus verfügt der humanoide Roboter über zwei Manipulatoren und nicht über einen, was die Aufgabe weiter vereinfacht.
Ein weiterer Vorteil ist sozial. In Zukunft können solche Roboter tatsächlich als Exoskelette für Menschen nach dem Vorbild von Iron Man eingesetzt werden. Das Beispiel von
Richard Browning, der ein Exoskelett einzieht, zeigt, dass solche Erfindungen gefragt sein werden - wer von uns möchte eigentlich nicht in einem Eisenkoffer mit Düsentriebwerken fliegen?
 Richard Browning schwebte einen Meter über dem Boden
Richard Browning schwebte einen Meter über dem BodenDer wissenschaftliche Artikel wurde am 16. Februar 2017 auf der Preprint-Website arXiv.org (arXiv: 1702.06075) veröffentlicht und zur Veröffentlichung in der Zeitschrift
IEEE Robotics and Automation Letters eingereicht.