
Zu Beginn unserer Veröffentlichungen haben wir wiederholt
das Thema des Einsatzes von Quadrocoptern in der Telekommunikation
angesprochen . In unserem Blog sind mehrere Fallstudien zu diesem Thema erschienen.
Heute konzentrieren wir uns jedoch auf die Verwendung von Koptern bei der Organisation drahtloser Netzwerke. Dies wurde mehr als einmal gesagt und ich erinnere mich, dass Facebook das Internet mit Hilfe von Drohnen auf der ganzen Welt verbreiten würde. Sie planten auch den Einsatz von Drohnen im Notfallministerium, beispielsweise bei der Organisation einer kurzfristigen Funkübertragung während der Organisation verschiedener Rettungsaktionen oder anderer Ereignisse. Im Allgemeinen in all den Situationen, in denen die schnelle Bereitstellung drahtloser Netzwerke erforderlich ist.
In diesem Material möchte ich eine
Studie ausländischer Experten vorstellen, die die Ergebnisse eines Experiments mit einer Drohne als Zugangspunkt deutlich zeigt.
Informationen zur Methodik und zu den Funktionen von Experimentiergeräten
Das Intel Galileo-Board wurde als Hauptelement des Systems verwendet. Das Board basiert auf der 32-Bit Intel Quark SoC x 1000 CPU mit einer Taktfrequenz von 400 MHz. Die verwendete Software war Linux Quark 3.19.8 Yocto-Standard. Die Stromquelle ist eine 10400-mAh-Batterie, die Galileo eine Batterielebensdauer von bis zu 15 Stunden bietet. Eine Intel Dual Band Wireless-AC 7260-Karte wurde über den PCI Express-Anschluss mit der Galileo-Karte verbunden. Die Karte kann Datenübertragungsraten von bis zu 867 Mbit / s bereitstellen. Es funktioniert mit mehreren Wi-Fi-Standards (802.11a / b / g / n / ac). An die Karte wurden zwei externe Antennen mit einer Verstärkung von 5 dBi angeschlossen. Das Gesamtgewicht der Galileo-Platine, der Batterie und des gesamten Antennenteils betrug 340 Gramm.
Die erste Stufe des Experiments bestand darin, die theoretischen Fähigkeiten zur Abdeckung einer Drohne zu untersuchen. Die Berechnung wurde unter Verwendung der Funkausbreitungsmodelle „Free Space“ und des Modells „Wireless Initiative New Radio“ - GEWINNER D1 durchgeführt.
Unter Verwendung dieser Modelle wurden die geschätzten maximalen Ausbreitungsbereiche für den Uplink und Downlink mehrerer Wi-Fi-Versionen berechnet. Darüber hinaus haben wir die Leistung der Galileo-Karte als Zwischenknoten eines Wi-Fi-Netzwerks gemessen.
Das Experiment basierte auf zwei Betriebsarten von drahtlosen Zugangspunkten. Die erste - "Infrastruktur" - ist in den meisten kommerziellen Wi-FI-Netzwerken implementiert. In diesem Modus ist der Zugangspunkt der zentrale Kommunikationsknoten, der Geräte im Netzwerk verbindet und als Gateway zum Internet dient. In diesem Modus übernimmt der Access Point alle Netzwerkverwaltungsaufgaben.
Der zweite Modus ist Ad-hoc. Es ist nicht weniger verbreitet und ein Mesh-Netzwerk, in dem keiner der Zugangspunkte zentral ist. Alle Knoten sind gleich und jeder übernimmt die Aufgaben eines Hosts oder Routers. Ad-hoc-Knoten können sich zu einem sogenannten Mobilfunknetz (Mobile Ad-hoc NETwork - MANET) bewegen. Der Vorteil dieses Modus ist, dass die Verbindung zwischen Knoten beim Verschieben von Geräten dynamisch geändert werden kann. Der effektive Betrieb eines solchen Netzwerks kann jedoch stark von Routing-Algorithmen abhängen, die für die Zustellung eines Pakets zwischen Netzwerkknoten verantwortlich sind. Aufgrund der Dynamik der Netzwerktopologie müssen die „Kosten“ des Pfads zwischen Knoten regelmäßig neu berechnet werden, um die besten Pfade zu finden.
Für Tests wurden zwei zusätzliche Geräte an das Netzwerk angeschlossen. Die Netzwerkknoten waren zwei Laptops mit Linux Ubuntu OS und Wi-Fi-Karte IEEE 802.11 a / b / g / n. Auf der Empfangsseite wurde ein Laptop mit einer Intel Centrino Advance-N 6230-Funkkarte und auf der anderen Seite ein Laptop mit einer Intel Dual Band 3160-Karte installiert. Die Intel Galileo-Karte, die im AP-Modus (Infrastrukturmodus) oder als eine von ihnen arbeitet Zwischenknoten (Ad-Hoc) zwischen Sender und Empfänger. Im letzten Gerät wurde das BATMAN-Routing-Protokoll verwendet, das sich bewährt hat. Netzwerkmetriken wurden mit iPerf3 erhalten. In diesem Experiment wurde eine Übertragung mit einer konstanten Geschwindigkeit zwischen Netzwerkknoten mit den folgenden Parametern verwendet: Übertragungsdauer - 30 Sekunden; Übertragungsrate: 1, 3, 5, 7, 9, 11 Mbit / s; Paketgröße: 512 und 1024 Bytes.
Die Parameter eines realen Luftnetzes wurden nach folgendem Schema gemessen:
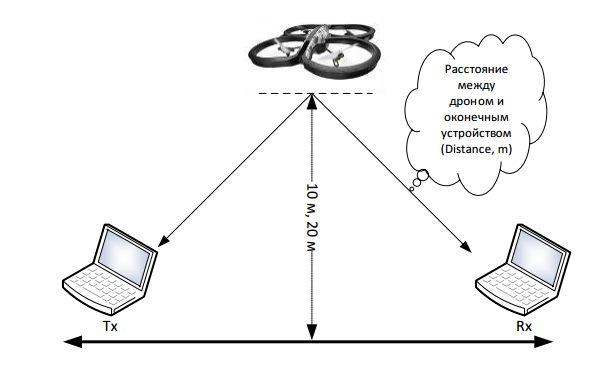
Die beiden Anschlüsse bewegten sich entlang der X-Achse allmählich voneinander weg. An den Punkten wurde die Netzwerkbandbreite mit einem iPerf3-Netzwerkanalysator gemessen und der maximale Signalpegel mit einem Rohde & Schwarz FSH3-Spektrumanalysator gemessen. Der Quadcopter hing in einer Höhe von 10 und 20 Metern, an denen Messungen durchgeführt wurden. Also sah die Drohne aus:

Aktionsradius
Wie wir im Experiment festgestellt haben, wurde der Kommunikationsbereich gemessen und die Abdeckung gemäß den Funkwellenausbreitungsmodellen „Freiraum“ und dem WINNER D1-Modell berechnet. Die Friis-Formel wird verwendet, wenn die Länge des Funksignals zwischen Sender und Empfänger berechnet werden muss, wenn keine Hindernisse zwischen ihnen bestehen.
Dieses Modell wird nur bei der Berechnung von Feldern in der Fernzone verwendet. Die Berechnung erfolgt nach folgender Formel:

Der WINNER D1 ist ein stochastisches Modell. Es berücksichtigt Verluste im Funkkanal. Es wird durch die Formel bestimmt:

Darin haben unbestimmte Buchstabenvariablen die folgenden Werte: A = 21,5, B = 44,2 und C = 20.
In den Berechnungen wurde eine Sendeleistung für Uplink und Downlink von 20 dBm (100 mW) angenommen. Die Berechnung des Kommunikationsbereichs wurde für verschiedene Versionen der IEEE 802.11-Standards durchgeführt. Die folgende Tabelle zeigt die Berechnungsergebnisse für den Downlink (Downlink) und für den Uplink (Uplink). Bei den Berechnungen wurde angenommen, dass sich das UAV auf einer Höhe von 10 m befindet.
In einem realen Experiment wurde der Pegel des empfangenen Signals geschätzt. Die folgende Abbildung zeigt den Signalpegel in Abhängigkeit von der Entfernung für den Infrastrukturbetriebsmodus (links) und den Ad-hoc-Modus (rechts), wenn das Flugzeug in einer Höhe von 10 Metern betrieben wird.

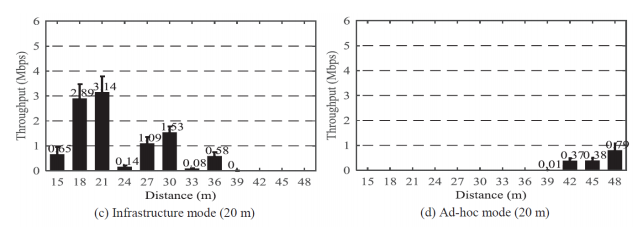
Die gleichen experimentellen Daten, jedoch für den Betrieb der Drohne in einer Höhe von 20 Metern:
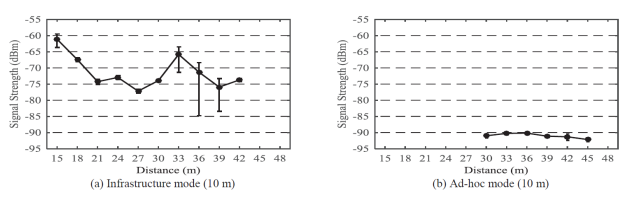
Die Ergebnisse zeigen einen spürbaren Unterschied zwischen theoretischen und praktischen Werten. Sie werden durch viele zusätzliche Faktoren verursacht. Im Allgemeinen ist der Pegel des empfangenen Signals jedoch viel höher als das im Ad-hoc empfangene Signal. Die Abbildungen b und d zeigen weniger gemessene Kontrollpunkte, da nur die Messungen aufgezeichnet wurden, die erhalten wurden, als das UAV als Zwischenpunkt zwischen zwei Endgeräten arbeitete. Die Ergebnisse, die durch direktes Verbinden von Sender und Empfänger des Laptops erzielt wurden, wurden nicht berücksichtigt. Mit anderen Worten, wenn der Abstand zwischen den Endpunkten weniger als 60 Meter (für eine Drohnenhöhe von 10 Metern) oder 80 Meter (für eine Höhe von 20 Metern) betrug, fungierte der Quadcopter im Ad-hoc-Modus nicht als Zwischengerät.
Datenrate
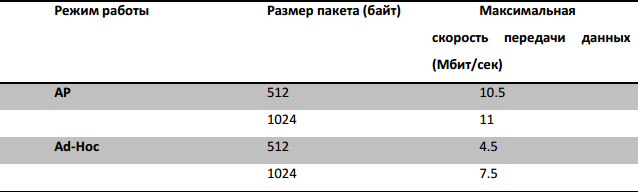
Um die Leistung des infrastrukturellen Betriebsmodus und des Ad-hoc-Modus im Hinblick auf den maximalen Durchsatz zu bewerten, wurde iPerf verwendet, um Pakete zwischen den Endpunkten auszuführen. Die ersten Messungen wurden unter Laborbedingungen durchgeführt. Gemessene Geschwindigkeit in verschiedenen Betriebsarten und Paketen von 512 und 1024 Bytes.
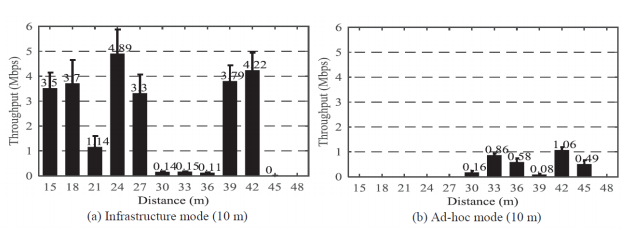
Die folgenden Messungen wurden unter realen Bedingungen durchgeführt. Die Infrastrukturgeschwindigkeit ist höher als die Ad-hoc-Netzwerkgeschwindigkeit.
Für den infrastrukturellen Betriebsmodus (links) und den Ad-hoc-Modus (rechts) beim Betrieb der Drohne in einer Höhe von 10 Metern:
Die gleichen experimentellen Daten, jedoch für den Betrieb der Drohne in einer Höhe von 20 Metern:
Die maximale Wi-F-Datenübertragungsrate variiert je nach Version des 802.11-Standards. Sie wird hauptsächlich durch Modulationsverfahren, Kanalbreite, Anzahl der räumlichen Ströme, Codierungs- und Spreizspektrumverfahren bestimmt.
Die maximal erreichbaren Geschwindigkeiten für das betreffende Experiment sind unten angegeben:
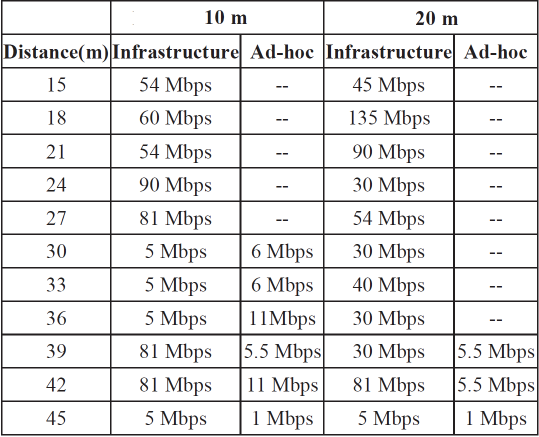
Das Erhöhen der Entfernung wirkt sich auf die Kommunikationsqualität aus. Dies wiederum zwingt Netzwerkkarten dazu, auf konservativere Modulationsmethoden zurückzugreifen und die Datenübertragungsraten zu reduzieren. Im Infrastrukturmodus ist es möglich, höheren Übertragungsgeschwindigkeiten standzuhalten.
Oben wurde während der Experimente deutlich gezeigt, welche Möglichkeiten sich bei der Verwendung von Quadrocoptern zum Scannen von drahtlos automatisch konfigurierten Mesh-Netzwerken eröffnen. Mit der Entwicklung von Kommunikationstechnologien und unbemannten Luftfahrzeugen werden sich um ein Vielfaches mehr Möglichkeiten ergeben, eine solche Art des Netzwerkaufbaus zu entwickeln