Vor 50 Jahren waren die ersten U-Boot-Drohnen nur für das Militär erschwinglich und wurden zum ersten Mal „angezündet“, um den internationalen Skandal um jeden Preis zu korrigieren.
Dann wurde die Technologie in den Dienst von Öl- und Gastycoons für den Bau und die Wartung von Plattformen zur Erzeugung von Ozeanen gestellt.
Der nächste Meilenstein ist die Suche nach der Titanic (aber in Wirklichkeit war es eine getarnte Unterwasseraufklärung). Dennoch brachten diese Expeditionen erhebliche Vorteile für zivile und wissenschaftliche Zwecke.
Um junge Leute für die Branche zu gewinnen, veranstalteten die Amerikaner 1998 einen internationalen Studentenwettbewerb, und 2013 startete die Asian Open Championship in Singapur.
Der Preis für den Eintritt in die Branche ging allmählich zurück: Zuerst gab es nur Militärbudgets, dann kamen Ölkonzerne, gefolgt von Universitäten, und schließlich erschienen Open-Source-Projekte im Wert von mehr als 500 US-Dollar für "Garagen-Startups". Und jetzt gibt es sogar einen Heimwerker von Unterwasserdrohnen für Studenten.
 Inhalt1. Auf der Suche nach einer Kernbombe am Grund des spanischen Meeres2. Ozeanölplattformen3. "Titanic" und geheime Unterwasserintelligenz4. Internationale Wettbewerbe: USA und Singapur5. Open Source Projekte, Crowdsourcing und Designer für Studenten6. Erfolge russischer Studententeams
Inhalt1. Auf der Suche nach einer Kernbombe am Grund des spanischen Meeres2. Ozeanölplattformen3. "Titanic" und geheime Unterwasserintelligenz4. Internationale Wettbewerbe: USA und Singapur5. Open Source Projekte, Crowdsourcing und Designer für Studenten6. Erfolge russischer StudententeamsSuche nach einer Kernbombe
B28RI thermonukleare Bombe aus einer Tiefe von 869 Metern.Flugzeugabsturz über Palomares .Das Time Magazine hat den Vorfall in die Liste der schwerwiegendsten Atomkatastrophen aufgenommen.
Am 17. Januar 1966 kollidierte ein amerikanischer strategischer Bomber B-52G mit thermonuklearen Waffen an Bord mit einem KC-135-Tankflugzeug, während er in der Luft tankte. Infolge der Katastrophe wurden 7 Menschen getötet und vier thermonukleare Bomben verloren. Drei von ihnen landeten an Land und wurden sofort gefunden, der vierte, der ins Meer fiel - erst nach zweimonatiger Suche.
Das Suchteam bestand aus dem Tauchexperten Captain Willard Searle und einem Mathematiker, Dr. John Craven, der unter Verwendung der
Bayes'schen Theorie der effektiven Lokalisierung verlorener Objekte einen Suchplan erstellte.
 Granaten von zwei thermonuklearen B28-Bomben aus Palomares.
Granaten von zwei thermonuklearen B28-Bomben aus Palomares.Um Suchoperationen durchzuführen, wurde ein Geschwader der US-Marine aus 34 Schiffen gebildet, die über dreitausend Seeleute und zivile Auftragnehmer beförderten. Um den Boden in geringen Tiefen von bis zu 24 Metern zu untersuchen, wurden Taucher eingesetzt. Taucher in harten Anzügen arbeiteten in Tiefen von bis zu 120 Metern. Die Suche in großen Tiefen wurde von bemannten Unterwasserfahrzeugen von Alvin und Aluminaut durchgeführt.
 Alvin - eines der bekanntesten operierten bemannten Unterwasserfahrzeuge (PAP). Die Bathyscaphe ist für drei Personen (zwei Wissenschaftler und einen Piloten) konzipiert und ermöglicht es Ihnen, in 10 Stunden bis zu einer Tiefe von 4500 Metern zu tauchen.Das weltweit erste Aluminium-U-Boot Aluminaut , 1964. Jacques Cousteau fuhr es dann übrigens.
Alvin - eines der bekanntesten operierten bemannten Unterwasserfahrzeuge (PAP). Die Bathyscaphe ist für drei Personen (zwei Wissenschaftler und einen Piloten) konzipiert und ermöglicht es Ihnen, in 10 Stunden bis zu einer Tiefe von 4500 Metern zu tauchen.Das weltweit erste Aluminium-U-Boot Aluminaut , 1964. Jacques Cousteau fuhr es dann übrigens.Die Bombe wurde von Alvin in einer Tiefe von fast 800 Metern entdeckt. Die Bombe lag an einem 70-Grad-Hang der Verwerfung, deren Tiefe 1300 Meter erreichte. Der erste Versuch, das Kabel am 26. März an Fallschirmschlingen zu befestigen, war erfolglos. Die Bombe fiel ab und ging wieder verloren. Es wurde am 2. April entdeckt. Am 5. April gab es eine ernsthafte Notsituation, als Alvin in einen Fallschirm verwickelt wurde, die Piloten des Geräts das Augenlicht verloren und 15 Minuten lang nicht freigelassen werden konnten.
Ferngesteuertes kabelgesteuertes Unterwasser-Bergungsfahrzeug (CURV).Nach diesem Vorfall wurde der ferngesteuerte unbewohnte CURV-Apparat für weitere Arbeiten verwendet. Am 7. April war es mit Hilfe des Geräts möglich, zwei Kabel an den Fallschirm anzuschließen, aber beim Versuch, das dritte Kabel zu starten, war auch der CURV verwirrt und verlor die Kontrolle. Versuche, ihn zu befreien, scheiterten und es wurde beschlossen, die Bombe mit dem Apparat auf zwei Kabeln zu heben. Der Versuch war erfolgreich und die Bombe wurde 81 Tage nach dem Absturz auf das Deck des Petrel-Rettungsschiffs gehoben.
Nach Angaben der New York Times war dies die erste öffentliche Demonstration einer Atomwaffe.Das Militär entwickelte sich im Bereich ferngesteuerter und autonomer Geräte weiter. In der Zwischenzeit hat die Ölindustrie die Technologie im Auge behalten.
Im Dienste der Öl- und Gasindustrie und der Produktionsplattformen

„Ferngesteuerte unbewohnte Unterwasserfahrzeuge“ (TNPA, ROV) wurden in den 1980er Jahren immer beliebter, als der größte Teil der neuen Offshore-Öl- und Gasentwicklung die Fähigkeiten von Tauchern überstieg. Mitte der 80er Jahre litt die marine TNLA-Industrie unter einer starken Stagnation der technologischen Entwicklung, die insbesondere durch sinkende Ölpreise und den globalen Wirtschaftsabschwung verursacht wurde.
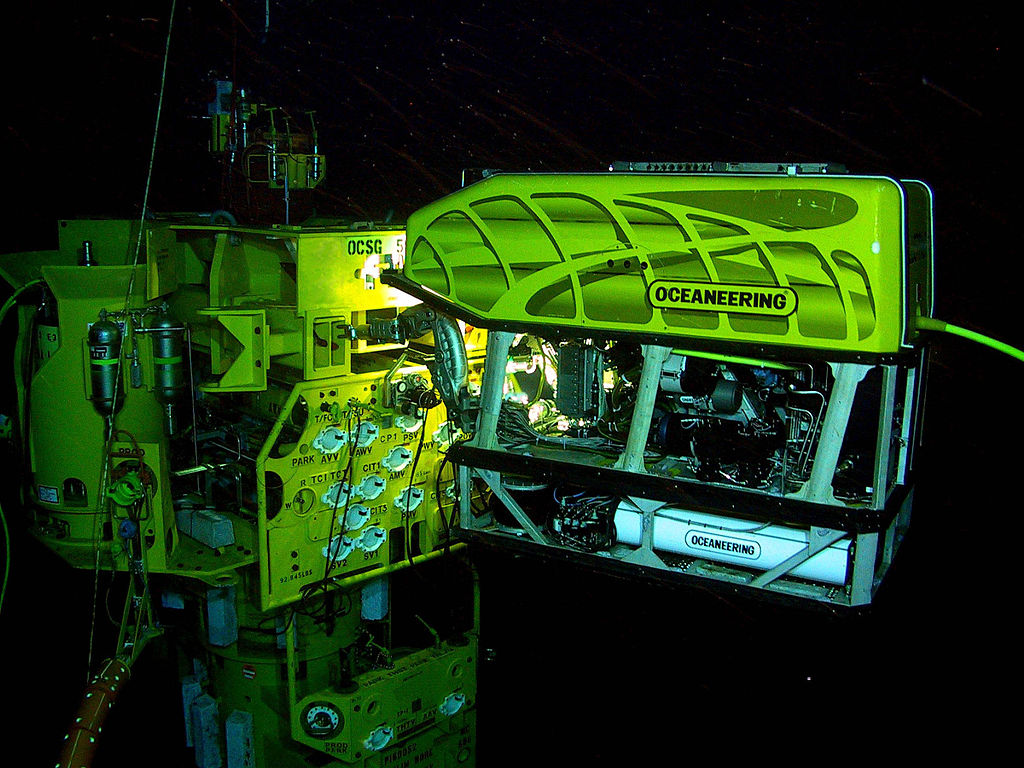 ROV in Aktion auf dem Unterwasseröl- und Gasfeld. TNPA macht eine Unterwasserstruktur verrückt.
ROV in Aktion auf dem Unterwasseröl- und Gasfeld. TNPA macht eine Unterwasserstruktur verrückt.TNLAs wie diese sind in der Offshore-Produktion weit verbreitet. Neue Technologien ermöglichen es Robotern, noch tiefer zu tauchen.
Hier ist übrigens das legendäre Video eines Hais, der ein Unterwasserkabel beißt:
Titanic

Die Titanic sank am 15. April 1912. Versuche, ihn zu finden, wurden 1953, 1966, 1970 und 1980 unternommen. (Lesen Sie
hier mehr.)
Den Rechnungen zufolge wurde auf der Titanic eine Schmuckkollektion im Wert von rund 300 Millionen US-Dollar transportiert. An Bord befanden sich außerdem die Originale des Rubins von Omar Khayyam sowie die Mumie der alten ägyptischen Prinzessin.
Robert Ballard entdeckte die Titanic 1985. Obwohl diese "Expedition" nur ein Cover war. Die Operation wurde von der US Navy für die Geheimdienste von zwei in den 1960er Jahren gesunkenen Atom-U-Booten USS Scorpion und USS Thresher finanziert, nicht von der Titanic. Die U-Boote sanken 1963 bzw. 1968, und die Seestreitkräfte wollten herausfinden, ob es ein Strahlungsleck gab.
ANGUS ist eine Reihe von Videokameras und Kameras, die von einem Schiff unter Wasser an einem Kabel gezogen werden:
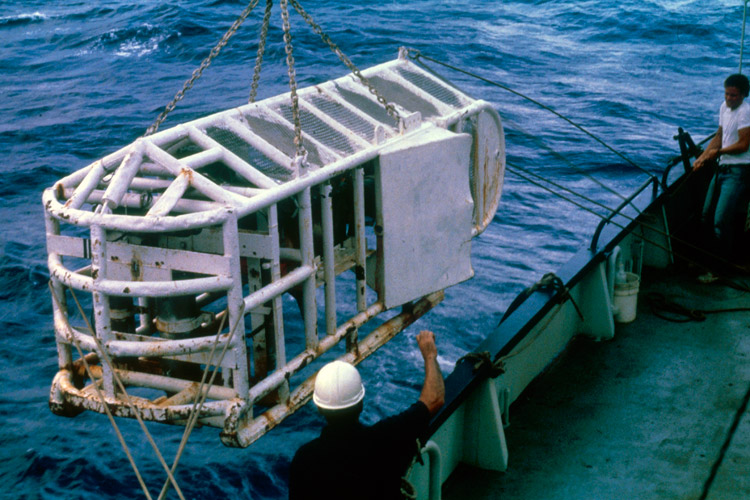 ANGUS (Akustisch navigierte geologische Unterwasseruntersuchung). Dieses Gerät hatte Nachteile: Es war nicht effizient genug. Das Filmmaterial konnte erst entwickelt und untersucht werden, nachdem der Apparat an die Oberfläche gehoben worden war.
ANGUS (Akustisch navigierte geologische Unterwasseruntersuchung). Dieses Gerät hatte Nachteile: Es war nicht effizient genug. Das Filmmaterial konnte erst entwickelt und untersucht werden, nachdem der Apparat an die Oberfläche gehoben worden war.Die Schöpfer dieses Apparats waren immer noch lustig. Ingenieure nannten das Gerät liebevoll „einen Narren am Seil“, da es nicht einmal die einfachsten Steuerungsmöglichkeiten gab. Der Slogan des ANGUS-Teams lautete: "Obwohl es undicht ist, tickt es weiter."
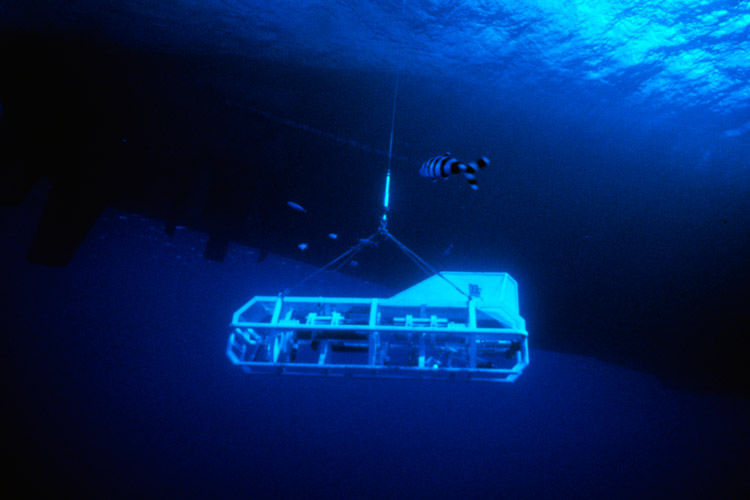 Argo war wie ANGUS eine Metallstruktur, die mit fünf Videokameras und zwei Sonarsystemen ausgestattet war.
Argo war wie ANGUS eine Metallstruktur, die mit fünf Videokameras und zwei Sonarsystemen ausgestattet war.Am 1. September 1985 zeigte ein an die Argo-Videokamera angeschlossener Monitor Objekte nicht natürlichen Ursprungs. Am nächsten Tag wurde der Rumpf der Titanic entdeckt und ANGUS zur Fotografie nach unten geschickt.
In den nächsten vier Tagen machten Argo und ANGUS Tausende von Fotos. Das Wrack der Titanic war über ein Gebiet mit einem Radius von 1600 Metern in einer Tiefe von etwa 3800 Metern verstreut.
Am 12. Juli 1986 unternimmt Ballard die zweite Expedition zur Titanic. Jetzt verfügt er über eine Drei-Personen-Bathyscaphe „Alvin“ und einen ferngesteuerten Roboter Jason Jr.
.jpg) "Alvin" - eines der bekanntesten operierten bemannten Unterwasserfahrzeuge (PAP). Die Bathyscaphe ist für drei Personen (zwei Wissenschaftler und einen Piloten) konzipiert und ermöglicht es Ihnen, in 10 Stunden bis zu einer Tiefe von 4500 Metern zu tauchen.Der Apparat "Jason Junior" (Jason Jr)Untersuchung der Titanic mit dem Jason Junior Apparat.
"Alvin" - eines der bekanntesten operierten bemannten Unterwasserfahrzeuge (PAP). Die Bathyscaphe ist für drei Personen (zwei Wissenschaftler und einen Piloten) konzipiert und ermöglicht es Ihnen, in 10 Stunden bis zu einer Tiefe von 4500 Metern zu tauchen.Der Apparat "Jason Junior" (Jason Jr)Untersuchung der Titanic mit dem Jason Junior Apparat.1987 drehte der National Geographic Channel einen Dokumentarfilm auf der Suche nach der Titanic, James Cameron sah ihn sich an und ließ sich zu seinem eigenen Meisterwerk inspirieren.
Im September 1995 unternahm Cameron an Bord des russischen Forschungsschiffs Akademik Mstislav Keldysh, das später ebenfalls an dem Film beteiligt war, persönlich 12 Tauchgänge zur Titanic auf den Badekapseln Mir-1 und Mir-2.
Der Titanic-Film war mehr wert als das Schiff selbst. Der Bau des Schiffes kostete 4.000.000 Pfund, was in modernem Geld 100.000.000 Pfund beträgt, und die Kosten für den James Cameron-Film betragen 125.000.000 Pfund.
Internationale Wettbewerbe
Wettbewerbe sind eine hervorragende Spielmechanik, die junge Leute anzieht und es Ihnen ermöglicht, viele Spezialisten auf dem Gebiet des Interesses "karriereorientiert" zu machen. Die Entstehung internationaler Wettbewerbe ist ein wichtiger Meilenstein in der Entwicklung von Unterwasserdrohnen und der Bildung von Industrie und Markt.
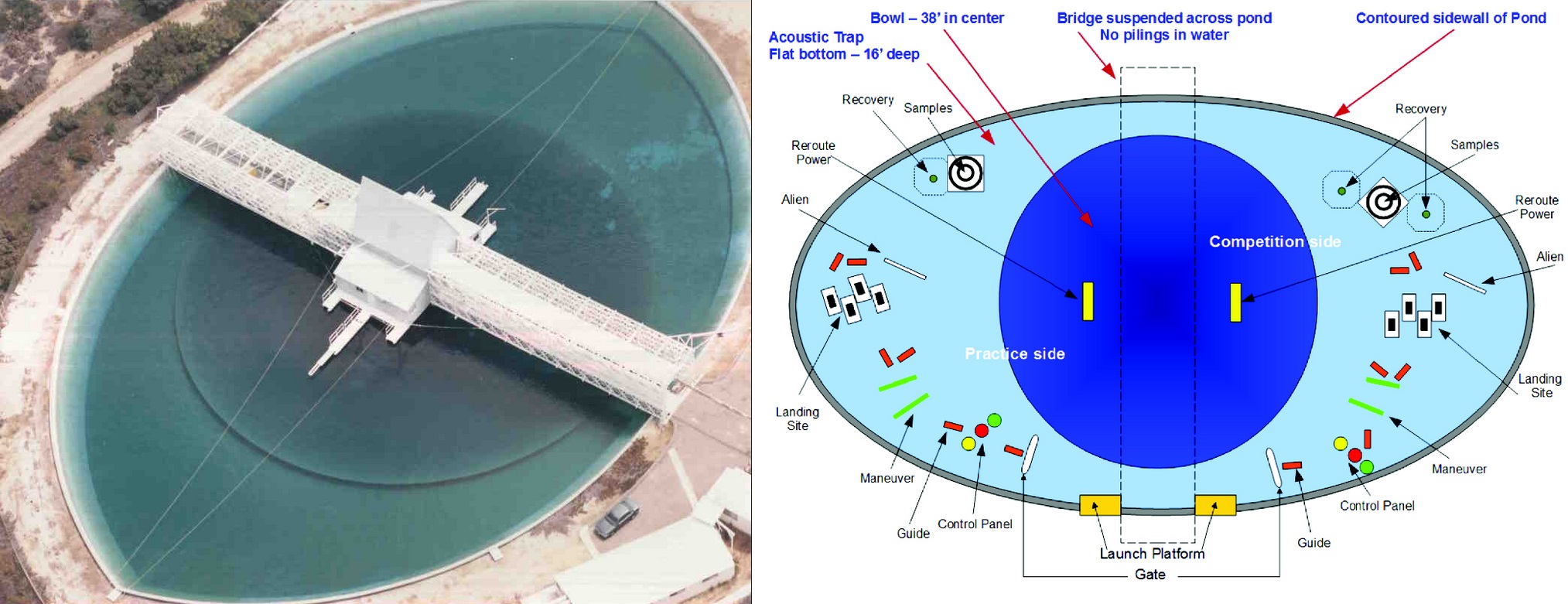
RobosubInternationale Wettbewerbe finden seit 1998 statt und finden im US Space and Naval Systems Center statt.
Website -
www.robonation.org/competition/robosubRegeln 2017 (PDF).
 Autonome
Autonome Unterwasserfahrzeuge (AUVs) nehmen am RoboSub-Wettbewerb teil und erfüllen realistische Missionen in anspruchsvollen Unterwasserumgebungen.

Die AUVSI Foundation wurde von der International Association of Unmanned Machine Developers gegründet und ist eine gemeinnützige Organisation, die Studenten die Möglichkeit bietet, an praktischen Robotik-Aktivitäten teilzunehmen, um ihr Interesse an Naturwissenschaften, Technik, Ingenieurwesen und Mathematik (STEM) zu wecken und aufrechtzuerhalten.

Die AUVSI Foundation bietet jedes Jahr eine Reihe von Bildungsprogrammen sowie Roboterwettbewerbe an, bei denen die Schüler ihre technische Ausbildung außerhalb des Klassenzimmers anwenden können. Solche Veranstaltungen sind eine ideale Vorbereitung auf berufliche Aktivitäten, daher wird den teilnehmenden Studenten häufig das begehrte Praktikum und eine Anstellung vor dem Abschluss angeboten.
AUV-Herausforderung in Singapur (SAUVC)Singapore AUV Challenge (SAUVC) Open Asian Underwater Robotics Championship, seit 2013 finden in Singapur Wettbewerbe statt.
Website -
www.sauvc.orgFacebook-Seite .
Regeln 2018 .
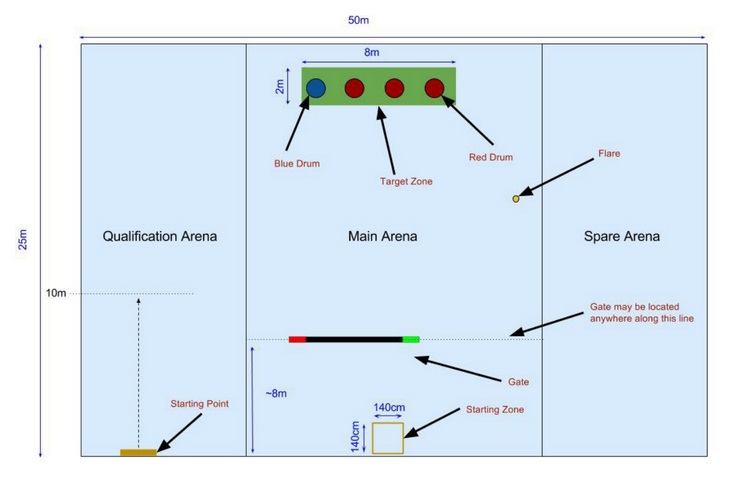
So beschreibt der Konkurrent 2013 die Aufgabe in eigenen Worten:
„Die Aufgabe kann ungefähr wie folgt beschrieben werden: Sie müssen über den schwarzen Streifen am Boden des Pools gehen und irgendwann auftauchen. Das heißt, ein solcher Linienroboter. Die Regeln beschreiben jedoch etwas unklar das Ganze. Es gibt einige Tore, durch die Sie gehen müssen. Wenn es jedoch gut ist, über den Streifen zu gehen, werden Sie automatisch durchlaufen. Es gibt auch einen Ständer, auf dem der Ball steht, und er muss getreten werden. Wenn Sie weit über den Streifen und in der richtigen Höhe gehen, treten Sie beim nächsten Drehen des Balls automatisch. Und Sie müssen an der richtigen Stelle auftauchen - wenn der schwarze Balken endet. Im Allgemeinen drehte sich der gesamte Wettbewerb um einen schwarzen Streifen unten :-). “
Eine ausführliche Geschichte über 2013 in der Unterwasserrobotik finden Sie
hier .

Openrov
Das Garage Startup war der Beginn der Geschichte von Hewlett-Packard und Apple sowie vieler anderer Silicon Valley-Projekte. Wenn „Hackern“ Technologie zur Verfügung steht, beginnen sie selbstständig zu experimentieren und finden erstaunliche Lösungen.
2012 wurde auf Kickstarter das OpenROV-Projekt gestartet, ein ferngesteuerter Mini-Unterwasserroboter mit einem Gewicht von etwa 2,5 kg. Die Steuerung erfolgt über einen Laptop, der mit einer Videokamera mit Hintergrundbeleuchtung ausgestattet ist. Eintauchtiefe: bis zu 100 Meter, Akkulaufzeit: ~ 1,5 Stunden. Es wird von drei bürstenlosen Motoren (bürstenloser 800-kV-Motor) angetrieben: zwei in der horizontalen und einer in der vertikalen Ebene. Um ein visuelles Bild zu erhalten, wird eine herkömmliche Webkamera (Microsoft LifeCam HD-5000) verwendet, die über USB mit BeagleBone verbunden ist.
Das Kit wird in Form von Ersatzteilen geliefert, die zusammengebaut werden müssen. Die Entwickler des Projekts haben sich zum Ziel gesetzt, die Unterwasserforschung auf der Grundlage der Prinzipien von Open Source-Software und Open Source-Hardware billig und für alle zugänglich zu machen. Zeichnungen sind auf
GitHub verfügbar.
Leistung bei TED:
 Das Beagle-Board wird als Bordcomputer verwendet.Trident 2016 (nächste Version von OpenROV)
Das Beagle-Board wird als Bordcomputer verwendet.Trident 2016 (nächste Version von OpenROV)StartROV OpenROV, USA, sammelt Spenden für die Entwicklung eines Trident-Unterwasser-Fernsteuerungsfahrzeugs (ROV). Das Unternehmen plante, 50.000 US-Dollar aufzubringen, hat jedoch bereits mehr als 560.000 US-Dollar angezogen.
OpenROV 2.8 und Trident DronesDie Reichweite beträgt bis zu 100 Meter. Gewicht - 2,9 kg. Die Höchstgeschwindigkeit beträgt 2 m / s. Akkulaufzeit - 3 Stunden. Unterstützung für automatisches Schweben und Beibehalten der Bewegungsrichtung. Es kann zur Kontrolle durch die erste Person mit einer Virtual-Reality-Brille verbunden werden.
Gladius 20172017 erschien auf der IndiGoGo-Website
ein weiteres
Crowdfunding-Projekt eines Unterwasserroboters.

4k Videokamera, 100 Meter Tiefe, 500 Aktionsradius, Preis 600-1700 Dollar.
Designer für SchulkinderMUR - JuniorSkills Wettbewerbspaket.
Die Entwicklung wurde von Sergey Moon aus Wladiwostok auf der RoboMech-2015-Ausstellung in Chabarowsk am 12. November vorgestellt.
Projektseite -
murproject.comAuf der Grundlage dieses Konstruktors wird die NTI-Olympiade für Schüler aus ganz Russland unter dem Profil
„Wasserrobotersysteme“ abgehalten.
In der Qualifikationsphase ist es notwendig, die Probleme in Physik und Informatik zu lösen sowie die Steuerung von Unterwasserrobotern auf einem 3D-Simulator zu beherrschen.
In der letzten Phase sind die Aufgaben interessanter:
- Montage von zwei Unterwasserrobotern des Konstrukteurs (der MUR-Konstrukteur wird vorgeschlagen);
- Beide Roboter müssen die Strecke zurücklegen, geführt von Unterwasserobjekten. Aber nur ein Roboter ist mit Kameras ausgestattet, der zweite sollte ein Signal vom ersten Roboter empfangen;
- Entwicklung eines eigenen Kommunikationsgeräts zwischen Robotern unter Verwendung der vorgeschlagenen Komponenten und Zugriff auf die Protokolle und elektrischen Schaltkreise des Konstrukteurs;
- Organisation der Kommunikation zwischen Robotern.
Bereits 2017 fand in Innopolis die Olympiade „Water Intelligent Robotic Systems“ statt. (Die Regeln sind
hier .)
Russland, Wladiwostok
Ich war sehr erfreut zu wissen, dass das Entwicklungsteam von Unterwasserdrohnen aus meiner Stadt und meiner Uni
(Far Eastern Federal University - FEFU) so cool ist.
 Seit 2012 gewinnt das gemeinsame Roboterteam der Far Eastern Federal University und der fernöstlichen Abteilung der Russischen Akademie der Wissenschaften jährlich den Sieg in der Klasse der autonomen Roboter bei den RoboSub-Weltturnieren und den AUV Challenge Asian Championships in Singapur.
Seit 2012 gewinnt das gemeinsame Roboterteam der Far Eastern Federal University und der fernöstlichen Abteilung der Russischen Akademie der Wissenschaften jährlich den Sieg in der Klasse der autonomen Roboter bei den RoboSub-Weltturnieren und den AUV Challenge Asian Championships in Singapur.Und hier ist der Junior, der Roboter, mit dem das Wladiwostok-Team
die Tiefen der Pools einfängt und Preise gewinnt.
 Robosub
Robosub2012 - 5. Platz (FEFU, Wladiwostok)
2013 - 3. Platz (FEFU, Wladiwostok)
2014 - 4. Platz (FEFU, Wladiwostok)
2015 - 3. und 6. Platz (Maritime Universität benannt nach Nevelsky und FEFU, Wladiwostok)
2016 - 4. Platz (Maritime Universität benannt nach Nevelsky, Wladiwostok)
2017 - 2. Platz (FEFU, Wladiwostok)
AUV-Herausforderung in Singapur2013 - 1. Platz (FEFU, Wladiwostok)
2015 - 2. Platz (FEFU, Wladiwostok)
2016 - 2. Platz (FEFU, Wladiwostok)
2017 - 1. Platz (FEFU, Wladiwostok)
Ich werde in der nächsten Ausgabe über das Wladiwostok-Team (Interviews mit Entwicklern, Leistungsmerkmale des Roboters usw.) und über die Regeln internationaler Wettbewerbe schreiben.Quellen
- Flugzeugabsturz über Palomares , Wikipedia
- Palomares. Wasserstoffbomben am Strand , TopWar
- Vollständiges Eintauchen: Wie der Einsatz von Robotern auf der Suche nach der Titanic den Ansatz der Unterwasserforschung T & P verändert hat
- Ungewöhnliche Wege, um die "Titanic" zu erheben: Versionen von Wissenschaftlern , RIA Novosti
- Robert Bollard erkundet die Ozeane , TED
- Der Weg von James Cameron , Wired, Geektimes
- James Cameron: Vor Avatar ... der neugierige Junge , TED
- Robosub
- Robo Saison 2013: Von unter Wasser zum Himmel , Geektimes
- OpenRov , Wikipedia
- OpenROV - Unterwasserroboter (Open Source) , Habrahabr
- David Lang: Mein Unterwasserroboter , TED
- U-Boot-Drohne OpenROV Trident , Geektimes
- Designer für Studenten Micro Underwater Robot Edu
- NTI-Olympiade: Wasserrobotersysteme