Hallo Geektimes!
Eintrag
Wir alle wissen seit langem, dass Roboter unsere Zukunft sind. Es gibt viele Bereiche der Robotik. Militärische Entwicklungen, soziale, unterhaltsame und einfach funktionierende Roboter.
Aber dieses Mal möchte ich im Namen des Teams des Colleges bei MIREA über die Wettbewerbskomponente und genau über die Roboter von Sumo-Wrestlern berichten.
Ein bisschen über unser Team
Wir existieren seit 2014. Die Gewinner und Gewinner der meisten Wettbewerbe sind Robofinist, Robofest, MIPT Spartakiad und kleinere Turniere, und wir sind auch absolute Meister Russlands für 2016-2017 in der Mini-Sumo-Nominierung.
Wer sind diese Sumoroboter?
Als wir zum ersten Mal von solchen Wettbewerben erfuhren, wurden Sumo-Wrestler hauptsächlich aus Lego hergestellt. Aber das ist eine ziemlich schlechte Idee, dazu später mehr.
Im Moment wird der richtige Sumoist sehr einfach beschrieben: ein völlig autonomes Stück Eisen auf Rädern mit Gehirn und zwei Sensoren, das ein ähnliches Stück Eisen aus dem Ring stößt.
Es gibt 4 Arten von ihnen:
1. Mega-Sumoist
2. Mini Sumoist
3. Mikro-Sumoist
4. Nano-Sumoist
Alle unterscheiden sich nicht nur äußerlich, sondern auch innerlich.
Mega sind die größten und gefährlichsten Roboter. Maximales Gewicht bis 3 kg, die Fähigkeit, verschiedene "Saugnäpfe" zu platzieren, was bei anderen Robotern nicht erlaubt ist.
Mini - schöne kleine Roboter bis 500 Gramm 10 x 10 cm. Nicht schwer zu löten, einfach einzurichten und zu montieren. Sie sind die beliebteste Nominierung im Sumo.
Micro und Nano - Mini Thumbnails. Mikro 5 mal 5 mal 5, Nano 2,5 mal 2,5 mal 2,5. Es ist schwierig, die Details zu löten und aufzunehmen. Beliebter als Mega Sumo.
Auf
dieser Seite können Sie die Wettbewerbsregeln genauer lesen. (hinzugefügt)
Was ist die Essenz von Robo Sumo?
Das Hauptziel: den Feind über die Grenzen eines runden Polygons hinaus zu treiben. Derjenige, der zuerst ein Objekt außerhalb berührt, verliert. Es scheint, dass es schwierig ist, den Feind einfach hinauszuschieben? Und die Schwierigkeit besteht darin, dass Roboter völlig autonom sind und immer mehr neue Strategien auftauchen, mit denen es immer schwieriger wird, umzugehen.
Video mit unseren Robotern (hinzugefügt):
Robofest 2016 (Roboter mit Blitz, Roboter mit Piratenflagge, fester schwarzer niedriger Roboter, schwarzer hoher Roboter ohne Bild)
Robo Picknick 2017 (nur unsere Roboter außer einem rechteckigen Roboter mit Schallsensoren)
Ohne Teilnahme:
Robotex 2016Lettische Robotik Meisterschaft 2017RoboChallenge 2016 RoboterwettbewerbEin kleiner Überblick über feindliche Suchtaktiken.Woraus bestehen sie?
Gehen wir zurück zum Lego. Höchstwahrscheinlich haben viele von Ihnen versucht, etwas mit einem programmierbaren Lego-Konstruktor zu tun, oder zumindest gesehen, wie es geht. Es gibt sogar eine separate Nominierung für solche Roboter 15 mal 15, aber furchtbar langweilig und nur für Anfänger oder kleine Roboter geeignet. Im Vergleich zu hausgemachten Mustern verliert dieses alles außer der Komplexität der Montage.
Das erste ist niedrige Geschwindigkeit. Zweitens riesige Größen. Drittens die geringe Reaktionsgeschwindigkeit der Sensoren. Und auch der Controller selbst lässt zu wünschen übrig.
Details zur Montage und Montage
Die Sumo-Wrestler, aus denen der Wettbewerb besteht, machen Arduino. Sie verwenden Textolithplatten, Lötsensoren, eine Steuerung, einen Treiber usw. Es gibt auch eine große Auswahl an Sensoren zur Erkennung eines Gegners, aber Infrarot- oder Lasersensoren sollten verwendet werden, weil Sonare sind sehr langsam und sperrig. Natürlich werden Motoren und Räder benötigt, damit sich der Roboter bewegen kann. Sie können ihnen eine unbegrenzte Anzahl geben, aber die Praxis zeigt, dass der Roboter am besten auf zwei Rädern fährt, die sich hinten befinden. Und natürlich kann ein Roboter nicht ohne einen Eimer und einen Haken leben. Der Eimer ist nur ein Koffer, eine Hülle und ein Schutz für die Platte und die Elemente. Meistens Stahl oder Eisen. Anhänger bestehen aus Klingen für Schreibwarenmesser, aber es gibt Fälle mit einem nicht standardmäßigen Ansatz, z. B. ein geschärftes Holzlineal oder Watte, aber dieser Ansatz ist wenig sinnvoll.
Am schwierigsten (zusätzlich zur Programmierung), einen Roboter zu entwerfen.Vor allem für diejenigen, die teilnehmen möchten, aber noch nicht wissen, wo sie anfangen sollen, sind wir bereit, die Spur des Roboters zu teilen, der ein Preisträger der MIPT 2016 Spartakiad ist.
PS Fertig in
SprintLayoutDies wird als allererste Stufe bezeichnet - die Platzierung von Motoren und Sensoren. Sie können hier auch zwei kleine Sensoren vor dem Tonabnehmer beobachten, also die Leitungssensoren.
Sie werden verwendet, um einen weißen Streifen auf der Deponie zu erkennen, um ein versehentliches Herausfallen aus dem Ring zu vermeiden. Sie sind jedoch keine obligatorische Komponente und werden in der Tat nicht sehr häufig verwendet. Bei hohen Geschwindigkeiten können Sie häufig nicht rechtzeitig anhalten.
Und hier sind bereits Controller, Treiber, Schalter und Batterieanschluss angebracht.
Es bleibt nur, die Spur zu drucken und auf die Leiterplatte zu übertragen und dann die Spuren zu verfolgen.
So sieht es auf einem fertigen Brett aus:
Bereit zum Starten des Roboters:
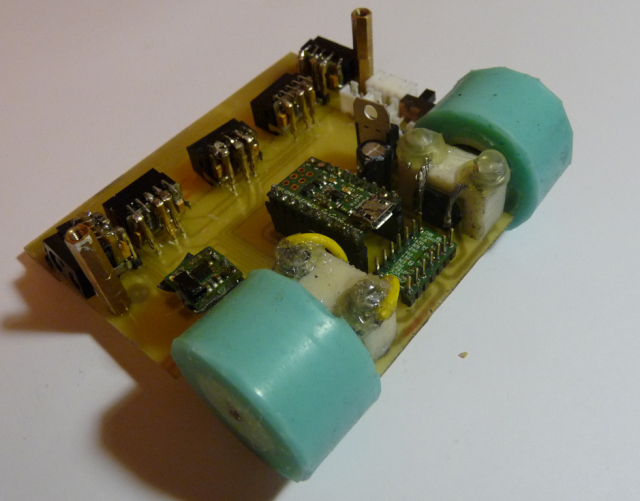
Wie Sie sehen, gibt es hier nichts besonders Kompliziertes. Über die Probleme unten.
Fahren wir mit der Programmierung fort
Am einfachsten ist es, Arduino oder Arduino-kompatible Controller zu verwenden. Auch Arduino IDE soll uns helfen. Gemäß dem Standardschema verfügt der Roboter über 5 Sensoren. So können Zustände sein
Wir schließen die Situation aus, in der die Seitensensoren gleichzeitig den Feind sehen (weil dies nicht möglich ist, und wenn dies geschieht, liegt eine Fehlfunktion in einem der Sensoren vor), sowie eine Situation, in der der Seitensensor und zwei Frontsensoren 0 ergeben (d. H. siehe), weil Das kann auch nicht sein, oder die Chance ist zu gering.
Um ihn zum Feind zu bringen, müssen wir nur die Stifte installieren, die Motoren mit Spannung versorgen und die Sensorwerte ablesen:
Robotercode// int pin_left=10; int pin_center_left=11; int pin_center_right=4; int pin_center=12; int pin_right=7; // int pin_motor_left_forward=9; int pin_motor_left_back=6; int pin_motor_right_forward=3; int pin_motor_right_back=5; // int cl,cc,cr,l,r; // void GLAZ() { cl = digitalRead(pin_center_left); cc = digitalRead(pin_center); cr = digitalRead(pin_center_right); l = digitalRead(pin_left); r = digitalRead(pin_right); } // , 0 255 void MOVE( int a, int b ) { if(a<0) { digitalWrite(pin_motor_left_forward,LOW); analogWrite(pin_motor_left_back,0-a); } else { analogWrite(pin_motor_left_forward,a); digitalWrite(pin_motor_left_back,LOW); } if(b<0) { digitalWrite(pin_motor_right_forward,LOW); analogWrite(pin_motor_right_back,0-b); } else { digitalWrite(pin_motor_right_back,LOW); analogWrite(pin_motor_right_forward,b); } } void setup() { pinMode (pin_center,INPUT);// pinMode (pin_right, INPUT);// pinMode (pin_left,INPUT);// pinMode (pin_center_right, INPUT);// pinMode (pin_center_left,INPUT);// pinMode (pin_line_left, INPUT); pinMode (pin_line_right, INPUT); pinMode (pin_start,INPUT);// pinMode (13,OUTPUT);// digitalWrite(13,HIGH); pinMode (pin_motor_left_back, OUTPUT);// pinMode (pin_motor_right_forward, OUTPUT);// pinMode (pin_motor_right_back, OUTPUT);// pinMode (pin_motor_left_forward,OUTPUT);// // while(!digitalRead(pin_start))continue; MOVE(200,200); } void loop() { GLAZ(); if(l && r) { if( (cl + cc + cr) < 2 || !cc ){ MOVE(255,255); } if( cc ) { if(!cl && cr) MOVE(0-180,180); if(cl && !cr) MOVE(180,0-180); } } else if( cc + cr + cl == 3 ) { if(!l && r) MOVE(0-200,200); if(!r && l) MOVE(200,0-200); } else if(cc) { if(!l && !cl && cr && r) MOVE(0-150,150); if(l && cl && !cr && !r) MOVE(150,0-150); } if(!digitalRead(pin_start))while(1){MOVE(0,0);} }
Sie müssen nur den Code verbessern.
Wichtig!Sensoren geben 1 zurück, wenn sie nichts sehen, und 0, wenn ein Hindernis vorhanden ist.
Nach dem Herunterladen des Codes über USB ist der Roboter startbereit.
Eine Überlegung wert
Erstens sind dies die Elemente. Die von uns verwendeten Sensoren (scharf 340) sind selten oder gar nicht. Daher müssen Sie, wenn möglich, viel auf einmal nehmen oder ein Analogon finden, das für die Parameter geeignet ist.
Zweitens ist es unmöglich, einem feindlichen Roboter kritischen Schaden zuzufügen oder Magnete zum Aufnehmen zu verwenden. Dies schränkt uns bei der Auswahl der Mittel für den Kampf ein wenig ein.
Vergessen Sie auch nicht die Räder. Dünne und gleitende Kurven funktionieren nicht, Sie können einfach nicht manövrieren und der Moment der Kraft reicht nicht aus. Testen Sie unbedingt den Gummi.
Denken Sie bei der Arbeit mit Motoren daran, dass diese unter maximaler Last arbeiten müssen und häufig brennen.
Es ist auch sinnvoll, austauschbare Batterien herzustellen, wie Der Roboter entlädt sich ziemlich schnell und das Aufladen dauert lange.
Liste der notwendigen Einkäufe:
1. Lötkolben, Lötmittel, Flussmittel (optional)
2. Textolite-Platten (zum Ätzen müssen Sie alle Spuren schließen, dann mehrere Stunden lang in eine Lösung aus Wasserstoffperoxid + Zitronensäure + Salz geben und dann beispielsweise das Papier abreißen, unter dem die Spuren versteckt waren).
3. Scharfe 340 Sensoren
4. Motoren, wählen Sie nach Geschmack, je mehr U / min, desto besser.
Einiges davon ist
eine Wahl wert :
Polulu. (hinzugefügt)
5. Batterien (ich rate Ihnen, Lithium-Polymer zu nehmen) + Ladestation
6. Schlüssel (Schalterknopf, an die Platine gelötet) und elektrische Elemente (siehe Bild mit Verfolgung)
7. Fahrer
8. Controller, für den Anfang können Sie den Polulu A-Star 32u4 micro ausprobieren und den Arduino-Bootloader ausfüllen
9. Blech für Gehäuse
10. Ein Bohrer für Löcher in der Platte
11. Launcher und dazu das Startmodul
PS Wenn Sie etwas verpasst haben - schreiben Sie, ich werde es korrigieren.
Wettbewerb
Die bevorstehenden Wettbewerbe werden in St. Petersburg stattfinden, Robofinist. Jetzt bereiten wir uns hart darauf vor. Wenn Sie teilnehmen möchten, müssen Sie alles klar und schnell erledigen.
Aber diese Wettbewerbe sind nicht die einzigen, es gibt viele in Russland, die größten finden in Moskau statt. Ungefähr ein bis zwei Mal im Monat können Sie Glück erleben und an Wettkämpfen teilnehmen.
Solche Wettbewerbe im Ausland sind keine Seltenheit und wir wollen auch dorthin. Hier ist eine ungefähre Karte der Weltwettbewerbe:

Wir hoffen wirklich, dass sich Robo-Sumo in unserem Land nur entwickeln wird und laden alle ein, an der Entwicklung ihres eigenen Roboters teilzunehmen.
Es sieht sehr episch aus, wenn Teile eines Roboters abfliegen.Wir beenden diesen Einführungsartikel für uns und wünschen allen viel Erfolg in der Robotik. Wir freuen uns, Sie bei den Wettbewerben zu sehen!