 Eine der Optionen für künstliche Muskeln ist oben auf dem Foto zu sehen (zwei Röhren). Sie heben einen 22 kg schweren Autoreifen. Foto: Massachusetts Institute of Technology
Eine der Optionen für künstliche Muskeln ist oben auf dem Foto zu sehen (zwei Röhren). Sie heben einen 22 kg schweren Autoreifen. Foto: Massachusetts Institute of TechnologyKünstliche „Muskeln“ behaupten, sichere und leistungsstarke Antriebe für viele verschiedene Geräte zu sein: von herkömmlichen Maschinen bis hin zu implantierbarer Elektronik und Robotik. Aber oft ist das Design und die Produktion solcher „Muskeln“ zu komplex und zu teuer, was ihre Verwendung einschränkt. Eine Gruppe von Wissenschaftlern des Massachusetts Institute of Technology und der Harvard University hat ein
extrem einfaches biokompatibles Laufwerksdesign
entwickelt, das
weniger als einen Dollar kostet und gleichzeitig leistungsstark genug für ein solches primitives Gerät ist.
Laufwerke können aus verschiedenen Materialien und verschiedenen Größen unter Verwendung eines veröffentlichten Designs im Origami-Stil hergestellt werden. Sie arbeiten an der Luft, unter Wasser, im Vakuum.
Das Grundkonzept des neuen Geräts umfasst nur einen komprimierbaren Rahmen, eine Außenhülle („Haut“) und einen Füllstoff, bei dem es sich um ein beliebiges flüssiges Material wie Luft oder Wasser handeln kann.
Experimente haben gezeigt, dass solche Antriebe bis zu 10% ihrer maximalen Länge komprimieren können, Belastungen von bis zu 600 kPa standhalten können und die maximale spezifische Leistung 2 Kilowatt pro Kilogramm überschreitet. Dies entspricht in etwa der spezifischen Kraft der menschlichen Muskeln oder übertrifft diese sogar.
 Design, Herstellungsprozess und daraus resultierende Multiskalen-Laufwerke
Design, Herstellungsprozess und daraus resultierende Multiskalen-LaufwerkeDie Arbeit der künstlichen Muskeln sowie der billige Herstellungsprozess sind in der obigen Abbildung dargestellt.
Legende(A) Miniatur-Linearantriebe mit Zick-Zack-Origami-Strukturen aus Polyetheretherketon (PEEK) als Rahmen und PVC-Folie als „Haut“. Aufgrund der Verwendung biokompatibler Materialien eignen sich solche Antriebe für den Einsatz in medizinischen Implantaten und tragbarer Elektronik. (B) Ein großes, leistungsstarkes Laufwerk, das auf einem Zick-Zack-Rahmen aus Nylon-Druckplatten montiert ist. Die „Haut“ besteht aus Nylon, das mit thermoplastischem Polyurethan beschichtet ist. Ein 22 kg schweres Autorad steigt in 30 Sekunden auf eine Höhe von 20 cm (
Video ). (C) Das Funktionsprinzip des Antriebs. Muskelkontraktionen treten hauptsächlich aufgrund der Spannungskraft der „Haut“ auf. Diese Kraft wird durch die Druckdifferenz zwischen dem internen und dem externen Fluidmedium erzeugt. Das Entfernen von Flüssigkeit aus dem Stellantrieb erhöht vorübergehend den Innendruck. (D) Produktionsprozess. Ein Standardantrieb kann schnell in drei einfachen Schritten hergestellt werden: Erstellen eines Chassis mit einer Vielzahl von Produktionsmethoden; Vorbereitung der "Haut"; Versiegelung einer dichten wasserdichten Schicht.
 Lineare Zick-Zack-Antriebe, hergestellt nach verschiedenen Methoden aus verschiedenen Materialien
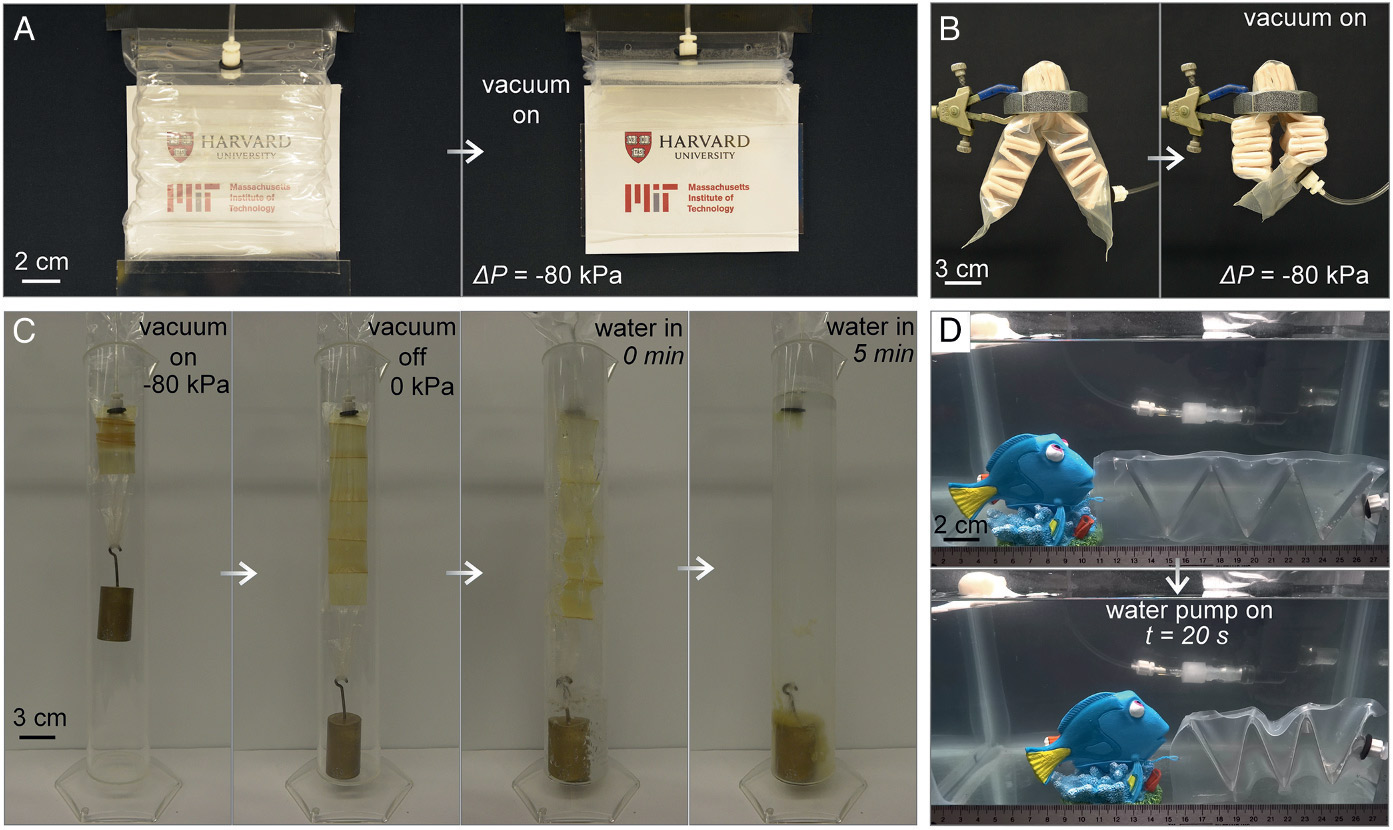
Lineare Zick-Zack-Antriebe, hergestellt nach verschiedenen Methoden aus verschiedenen MaterialienTeil A zeigt einen dünnen transparenten Antrieb, der eine Acrylplatte anhebt. Hier besteht der Rahmen aus einer transparenten Polyesterplatte mit einer Dicke von 0,254 mm durch Laserschneiden und manuelles Falten. Leder: Transparente PVC-Folie (Vinyl) mit einer Dicke von 0,102 mm. Flüssiges Material: Luft.
In Abbildung B funktioniert ein weicher Linearantrieb auch dann gut, wenn er in einer Metallmutter eingerastet ist. Rahmen und Leder: Silikonkautschuk und thermoplastisches Polyurethan 0,24 mm. Flüssiges Material: Luft.
In Fig. C löst sich ein vakuumlöslicher Antrieb in heißem Wasser bei einer Temperatur von etwa 70ºC in fünf Minuten. Sowohl der Rahmen als auch das Leder bestehen aus Polyvinylacetat. Flüssiges Material: Luft.
Schließlich zeigt die letzte Abbildung, dass ein Antrieb mit Wasser anstelle von Luft als flüssigem Material auf einem Stahlrahmen erfolgreich unter Wasser arbeitet, insbesondere einen 3,5-cm-Fisch bewegt.
"Aktuatoren wie künstliche Muskeln sind eine der wichtigsten Aufgaben im Ingenieurwesen", sagt Ph.D. Rob Wood, einer der vier Autoren der wissenschaftlichen Arbeit. „Jetzt haben wir Antriebe mit ähnlichen Eigenschaften wie echte Muskeln entwickelt, sodass Sie sich vorstellen können, fast jeden Roboter für nahezu jede Aufgabe herzustellen.“
Der wissenschaftliche Artikel wurde am 27. November 2017 in der Zeitschrift
Proceedings der National Academy of Sciences (doi: 10.1073 / pnas.1713450114,
pdf ) veröffentlicht.