Wir setzen eine Reihe von Artikeln zur Automatisierung der Kunstflugleistung auf einem kleinen UAV fort. Dieser Artikel hat zuallererst ein pädagogisches Ziel: Hier zeigen wir am Beispiel der Aufgabe, bei der Steuerung eines Flugzeugs mit nur Querrudern das Kunstflug „Barrel“ durchzuführen, wie man das einfachste automatische Steuerungssystem (ACS) erstellt. Dieser Artikel ist der zweite in einer Reihe von Veröffentlichungen „Flight UAV“, in denen der Aufbau von Hardware- und Softwareteilen von selbstfahrenden Waffen in einer Schulungsform beschrieben wird.

Link zum vorherigen Artikel des Zyklus:
1. “Flug UAV. Wie man ein Fass macht "Inhalt:
EinführungBewegungsmodellModellparameter. TrägheitsmomentModellparameter. Derivate des RollmomentsModellüberprüfungKontrollsynthese für die FassleistungFlugversuchBemerkungenSchlussfolgerungenEinführung
Deshalb haben wir uns entschlossen, das „Fass“ im Automatikmodus zu implementieren. Offensichtlich ist es für die automatische Ausführung einer Figur notwendig, das entsprechende Kontrollgesetz zu formulieren. Der Erfindungsprozess ist viel schmerzloser und schneller, wenn Sie ein mathematisches Modell der Bewegung des Flugzeugs verwenden. Das Testen des Steuergesetzes in einem Flugversuch ist zwar möglich, erfordert jedoch viel mehr Zeit und kann im Falle eines Verlusts oder einer Beschädigung des Geräts viel teurer sein.
Da bei kleinen Anstell- und Gleitwinkeln des Flugzeugs seine Rollbewegung praktisch nicht mit der Bewegung in zwei anderen Kanälen verbunden ist: Spur und Längsrichtung - um einen einfachen „Lauf“ zu vervollständigen, reicht es aus, ein Bewegungsmodell nur um eine Achse - die Achse
OX des zugehörigen
SC - zu erstellen. Aus dem gleichen Grund wird sich das Querrudersteuerungsgesetz bei der Erstellung eines vollständigen Steuerungssystems nicht wesentlich ändern.
Bewegungsmodell
Die Bewegungsgleichung des
Flugzeugs um die Längsachse
OX des zugehörigen SC ist äußerst einfach:
Ix dot mathrm omegax=Mx,
wo
Ix Ist das Trägheitsmoment um die Achse
OX und das Moment
Mx besteht aus mehreren Komponenten, von denen für eine realistische Beschreibung der Bewegung unseres Flugzeugs nur zwei berücksichtigt werden müssen:
Mx=M omegaxx omegax+M deltaax deltaa,
wo
M omegaxx omegax - das Moment aufgrund der Drehung des Flugzeugs um die Achse
OX (Dämpfungsmoment),
M deltaax deltaa - das Moment aufgrund der Abweichung der Querruder (Steuermoment). Der letzte Ausdruck ist in linearisierter Form geschrieben: Rollmoment
Mx linear abhängig von der Winkelgeschwindigkeit
omegax und Querruderauslenkungswinkel
deltaa mit konstanten Proportionalitätskoeffizienten
M omegaxx und
M deltaax entsprechend.
Wie Sie wissen (zum Beispiel aus dem
Wiki ), eine lineare Differentialgleichung
Ix dot mathrm omegax=M omegaxx omegax+M deltaax deltaa
entspricht der aperiodischen Verbindung erster Ordnung
W= frackTp+1,
wo
W - Übertragungsfunktion,
p - Differenzierungsoperator,
T Ist die Zeitkonstante und
k - gewinnen.
Wie bewege ich mich von einer Differentialgleichung zu einer Übertragungsfunktion?In unserem Fall können wir von den Parametern der Gleichung zu den Parametern der Übertragungsfunktion wie folgt vorgehen (in Kenntnis der Ableitung
M omegaxx negativ):
Ix dot omegax=M omegaxx omegax+M deltaax deltaa longrightarrowIx dot omegax=− left|M omegaxx right| omegax+M deltaax deltaa
Ix dot omegax+ left|M omegaxx right| omegax=M deltaax deltaa longrightarrow left(Ixp+ left|M omegaxx right| right) omegax=M deltaax deltaa
left( fracIx left|M omegaxx right|p+1 right) omegax= fracM deltaax left|M omegaxx right| deltaa longrightarrowT= fracIx left|M omegaxx right|,k= fracM deltaax left|M omegaxx right|.
Für die aperiodische Verbindung die Zeitkonstante
T gleich der Zeit, für die die Ausgabemenge
omegax(t) mit einem einstufigen Effekt der Eingangsmenge
deltaa(t) nimmt einen Wert an, der sich vom stationären Zustand um ~ 5% und die Verstärkung unterscheidet
k numerisch gleich dem stationären Wert des Ausgabewerts mit einem Einzelschritteffekt:
Das konstruierte Bewegungsmodell enthält zwei unbekannte Parameter: Verstärkung
k und Zeitkonstante
T . Diese Parameter werden durch die Eigenschaften des physikalischen Systems ausgedrückt: Trägheitsmoment
Ix sowie Ableitungen des Rollmoments
M omegaxx und
M deltaax ::
M omegaxx=− fracIxT, colorwhite longrightarrowM deltaax=−kM omegaxx= frackIxT.
Also, wenn das Trägheitsmoment bekannt ist
Ix Nachdem die Modellparameter ermittelt wurden, ist es möglich, die Systemparameter daraus wiederherzustellen.
Modellparameter. Trägheitsmoment Ix
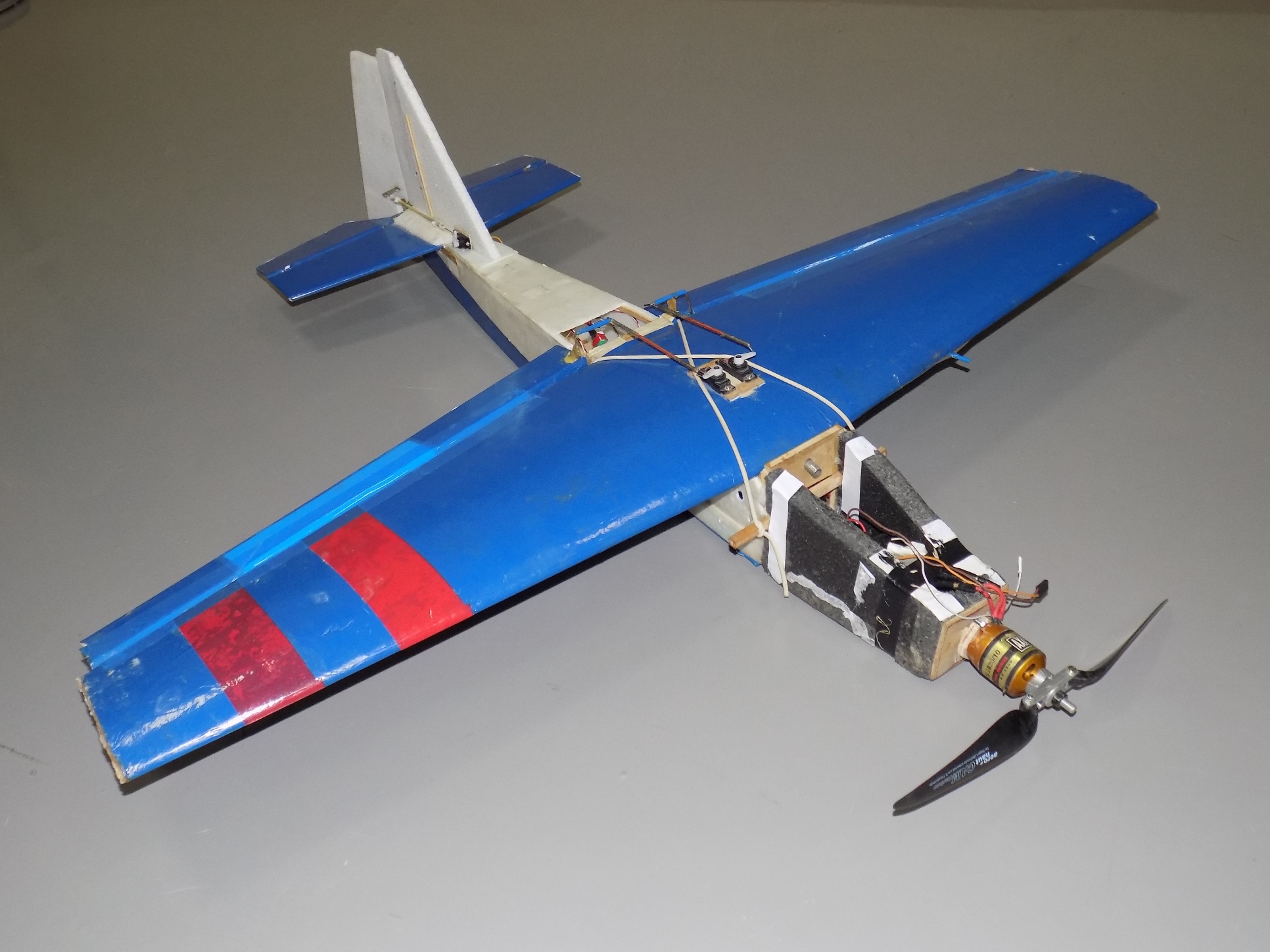
Unser Flugzeug besteht aus folgenden Teilen: Tragfläche, Rumpf mit Gefieder, Motor, Batterie (Batterie) und
Avionik :

Die Avionik umfasst: die Autopilot-Karte, die
SNA- Empfängerkarte, die Funkmodemkarte, die Signalempfängerkarte von der Steuereinrichtung, zwei Spannungsregler, einen Motordrehzahlregler und auch Verbindungskabel.

Aufgrund des geringen Gewichts der Avionik kann ihr Beitrag zum Gesamtträgheitsmoment vernachlässigt werden.
Wie wurde das Trägheitsmoment geschätzt?Abschätzung des Trägheitsmoments
Ix kann wie folgt durchgeführt werden. Schauen wir uns die Ebene entlang der Achse
OX an :

Und stellen Sie es sich dann in Form des folgenden vereinfachten Modells vor:
 Schema zur Berechnung des Trägheitsmoments Ix . Oben links - die Batterie, unten rechts - der Motor. Motor und Batterie befinden sich auf der Rumpfachse
Schema zur Berechnung des Trägheitsmoments Ix . Oben links - die Batterie, unten rechts - der Motor. Motor und Batterie befinden sich auf der RumpfachseEs ist ersichtlich, dass zum Erstellen des Modells der Kiel, das horizontale Heck, die Schraube und die Avionik verworfen wurden. In diesem Fall blieb: Rumpf, Flügel, Batterie, Motor. Durch Messen der Massen und charakteristischen Abmessungen jedes Teils können wir die Trägheitsmomente jedes Teils relativ zur Längsachse des Rumpfes berechnen:
- Flügel (dünner Stab): Ixw= frac112mwL2w+mwy2w=1,7 cdot10−2kg cdotm2
- Rumpf (Hohlzylinder): Ixf=mfr2f=2,8 cdot10−4kg cdotm2
- Batterie (Platte): Ixa= frac112ma left(h2a+w2a right)=3,4 cdot10−4kg cdotm2
- Motor (Scheibe): Ixe= frac12mer2e=2,3 cdot10−5kg cdotm2
Der Gesamtwert des Trägheitsmoments des Flugzeugs relativ zur Achse
OX wird durch Addition der Trägheitsmomente der Teile erhalten:
Ix=Ixw+Ixf+Ixa+Ixe=1,8 cdot10−2kg cdotm2
Schätzung des Beitrags jedes Teils des Flugzeugs zum Gesamtträgheitsmoment
Ix stellte sich Folgendes heraus:
- Flügel - 96,3%,
- der Rumpf - 1,6%,
- Motor und Batterie - 2%,
Es ist ersichtlich, dass der Hauptbeitrag zum Gesamtträgheitsmoment
Ix macht einen Flügel. Dies liegt daran, dass der Flügel eine ziemlich große Quergröße hat (Flügelspannweite - 1 m):

Daher hat der Flügel trotz des geringen Gewichts (etwa 20% der gesamten Startmasse des Flugzeugs) ein erhebliches Trägheitsmoment.
Modellparameter. Derivate des Rollmoments M omegaxx und M deltaax
Die Berechnung der Rollmomentableitungen ist eine ziemlich schwierige Aufgabe, die mit der Berechnung der aerodynamischen Eigenschaften von Flugzeugen durch numerische Methoden oder unter Verwendung technischer Techniken verbunden ist. Die Anwendung der ersten und zweiten Methode erfordert erhebliche zeitliche, intellektuelle und rechnerische Kosten, die bei der Entwicklung von Steuerungssystemen für große Flugzeuge gerechtfertigt sind, bei denen die Fehlerkosten immer noch die Kosten für den Bau eines guten Modells übersteigen. Für die UAV-Kontrollaufgabe, deren Masse 2 kg nicht überschreitet, ist dieser Ansatz kaum gerechtfertigt. Eine andere Möglichkeit, diese Ableitungen zu berechnen, ist ein Flugexperiment. Angesichts der Billigkeit unserer Flugzeuge sowie der Nähe eines geeigneten Feldes für ein solches Experiment war die Wahl für uns offensichtlich.
Nachdem wir die Firmware zur manuellen Steuerung und Registrierung von Parametern in den Autopiloten geschrieben hatten, bauten wir das Flugzeug zusammen und bereiteten es für Tests vor:
Im Flugexperiment konnten Daten zum Abweichungswinkel der Querruder und zur Drehwinkelgeschwindigkeit des Flugzeugs erhalten werden. Der Pilot steuerte das Flugzeug im manuellen Modus, flog im Kreis, drehte und "lief" und die Bordausrüstung zeichnete die erforderlichen Informationen auf und schickte sie an die Bodenstation. Als Ergebnis wurden die notwendigen Abhängigkeiten erhalten:
omegax(t) (Grad / s) und
deltaa(t) (b / p). Wert
deltaa(t) stellt den normalisierten Querruderabweichungswinkel dar: Ein Wert von 1 entspricht einer maximalen Abweichung und ein Wert von -1 entspricht einem Minimum:

Wie man jetzt bestimmt
M omegaxx und
M deltaax aus den empfangenen Daten? Die Antwort besteht darin, die Übergangsparameter in Diagrammen zu messen.
omegax(t) und
deltaa(t) .
Wie wurden die Koeffizienten k und T bestimmt?Gewinn
k wurde bestimmt, indem der Wert des stationären Wertes der Winkelgeschwindigkeit dem Wert der Querruderabweichung zugewiesen wurde:
 Abhängigkeiten des Querruderauslenkungswinkels und der Winkelrollgeschwindigkeit von der im Flugexperiment erhaltenen Zeit
Abhängigkeiten des Querruderauslenkungswinkels und der Winkelrollgeschwindigkeit von der im Flugexperiment erhaltenen ZeitIn der vorherigen Figur entsprechen die Abschnitte des stationären Wertes der Winkelgeschwindigkeit beispielsweise ungefähr den Segmenten in der Nähe der Zeitpunkte 422, 425 und 438 s (in der Figur dunkelrot markiert).
Zeitkonstante
T bestimmt aus den gleichen Graphen. Hierzu wurden Abschnitte mit einer starken Änderung des Querruderauslenkungswinkels gefunden und anschließend die Zeit gemessen, für die die Winkelgeschwindigkeit einen Wert annimmt, der um 5% vom stationären Wert abweicht.
Das Ergebnis der Bestimmung der Werte der Zeitkonstante und der Verstärkung ist wie folgt:
T=0,075 texts ,
k=−575 textdeg/s . Diese Werte der Koeffizienten mit einem bekannten Wert des Trägheitsmoments
Ix Die folgenden Werte der Ableitungen des Drehimpulses entsprechen:
M omegaxx=− fracIxT=−0,24 frac textN cdot textm textdeg/s, colorweiß longrightarrowM deltaax=−kM omegaxx= frackIxT=−138 frac textN cdot textm text[].
Modellüberprüfung
Also, ein Modell gebaut zu haben, dessen Basis eine aperiodische Verbindung ist
W= frac−5750,75p+1,
Dies kann durch Anlegen eines Signals an den Eingang überprüft werden
delta(t) aus dem Flugversuch erhalten und vergleichen Sie das Ausgangssignal des Modells mit dem Wert
omegax(t) auch im Experiment erhalten.
Wie wurde die Simulation durchgeführt?Wir haben das Tool für die Modellierung in erster Linie aufgrund der Möglichkeit ausgewählt, die Ergebnisse von einer Vielzahl von Lesern zu wiederholen. Dies bedeutet in erster Linie, dass das Programm gemeinfrei sein sollte. Im Prinzip kann das Problem der Modellierung des Verhaltens der aperiodischen Verbindung erster Ordnung gelöst werden, indem Sie Ihr eigenes Werkzeug von Grund auf neu erstellen. Da das Modell jedoch in Zukunft komplizierter wird, kann die Erstellung eines eigenen Instruments von der Hauptaufgabe ablenken - der Erstellung von selbstfahrenden Waffen. Aufgrund des Prinzips der Offenheit des Tools haben wir uns für
JSBsim entschieden.
Im vorherigen Abschnitt haben wir die Koeffizientenwerte erhalten
M deltaax und
M omegaxx . Wir verwenden sie, um die Bewegung des Flugzeugs zu simulieren. Aus dem
letzten Artikel erinnern wir uns, dass die Konfiguration des Flugzeugmodells in
JSBsim mithilfe einer
XML- Datei festgelegt wird. Erstellen Sie Ihr eigenes Modell:
<?xml version="1.0"?> <fdm_config name="OP1" version="2.0" release="BETA"> <metrics> <wingarea unit="M2"> 0.2 </wingarea> <wingspan unit="M"> 1.0 </wingspan> <chord unit="M"> 0.2 </chord> <htailarea unit="M2"> 0.03 </htailarea> <htailarm unit="M"> 0.5 </htailarm> <vtailarea unit="M2"> 0.03 </vtailarea> <vtailarm unit="M"> 0.5 </vtailarm> <location name="AERORP" unit="M"> <x> -0.025 </x> <y> 0 </y> <z> 0.05 </z> </location> </metrics> <mass_balance> <ixx unit="KG*M2"> 0.018 </ixx> <iyy unit="KG*M2"> 0.018 </iyy> <izz unit="KG*M2"> 0.018 </izz> <emptywt unit="KG"> 1.2 </emptywt> <location name="CG" unit="M"> <x> 0 </x> <y> 0 </y> <z> 0 </z> </location> </mass_balance> <ground_reactions> </ground_reactions> <propulsion> </propulsion> <flight_control name="FCS: OP1"> <channel name="Pitch"> </channel> <channel name="Roll"> <summer name="Roll Trim Sum"> <input>fcs/aileron-cmd-norm</input> <clipto> <min>-1</min> <max>1</max> </clipto> </summer> </channel> <channel name="Yaw"> </channel> </flight_control> <aerodynamics> <axis name="DRAG"> </axis> <axis name="SIDE"> </axis> <axis name="LIFT"> </axis> <axis name="ROLL" unit="N*M"> <function name="aero/coefficient/Clp"> <description>Roll_moment_due_to_roll_rate</description> <product> <property>velocities/p-aero-rad_sec</property> <value>-0.24</value> </product> </function> <function name="aero/coefficient/Clda"> <description>Roll_moment_due_to_aileron</description> <product> <property>fcs/aileron-cmd-norm</property> <value> 2.4 </value> </product> </function> </axis> <axis name="PITCH"> </axis> <axis name="YAW"> </axis> </aerodynamics> <output name="OP1.csv" rate="60" type="CSV"> <property> velocities/vc-kts </property> <property> aero/alphadot-deg_sec </property> <property> aero/betadot-deg_sec </property> <property> fcs/throttle-cmd-norm </property> <simulation> OFF </simulation> <atmosphere> OFF </atmosphere> <massprops> OFF </massprops> <aerosurfaces> ON </aerosurfaces> <rates> ON </rates> <velocities> ON </velocities> <forces> OFF </forces> <moments> OFF </moments> <position> ON </position> <coefficients> OFF </coefficients> <ground_reactions> OFF </ground_reactions> <fcs> ON </fcs> <propulsion> OFF </propulsion> </output> </fdm_config>
Da wir nur entlang der Rolle ein Modell der Bewegung des Geräts erstellen, bleiben viele der Dateibereiche leer. Die folgenden Merkmale werden nacheinander in der Modelldatei festgelegt.
Die geometrischen Abmessungen des Flugzeugs werden im Abschnitt "
Metriken " festgelegt: Flügelfläche, Flügelspannweite, Länge der durchschnittlichen aerodynamischen Sehne, Fläche des horizontalen Hecks, Schulter des horizontalen Hecks, Fläche des vertikalen Hecks, Schulter des vertikalen Hecks, Position des aerodynamischen Fokus.
Die Masseneigenschaften des Flugzeugs werden im Abschnitt
mass_balance festgelegt : Trägheitstensor des Flugzeugs, Leergewicht, Position des Massenschwerpunkts.
Es ist anzumerken, dass die absoluten Positionen des aerodynamischen Fokus und des Massenschwerpunkts des Flugzeugs nicht an der Berechnung der Dynamik des Geräts beteiligt sind, ihre relative Position ist wichtig.
In den folgenden Abschnitten werden die Eigenschaften des Flugzeugfahrwerks und seines Kraftwerks beschrieben.
Im nächsten Abschnitt, der für
das Steuerungssystem verantwortlich ist , füllen wir den Kanal aus, der für die Rollsteuerung verantwortlich ist: Wir geben die einzige Eingabe
fcs / aileron-cmd-norm an , deren Wert von -1 auf 1 normalisiert wird.
Die aerodynamischen Eigenschaften werden im Abschnitt
Aerodynamik festgelegt : Kräfte werden in einem Hochgeschwindigkeitskoordinatensystem und Momente in einem gekoppelten festgelegt. Wir interessieren uns für den Rollmoment. Im Abschnitt
Achsenname = "ROLL" werden Funktionen definiert, die das Moment der Kräfte aus verschiedenen Komponenten der Projektion des Moments der aerodynamischen Kräfte auf die
OX- Achse des zugehörigen Koordinatensystems bestimmen. In unserem Modell gibt es zwei solche Komponenten. Die erste Komponente ist das Dämpfungsmoment, das gleich dem Produkt der Winkelgeschwindigkeit durch den zuvor bestimmten Koeffizienten ist
M omegaxx . Die zweite Komponente ist das Moment von den Querrudern bei einer festen Fluggeschwindigkeit: Es ist gleich dem Produkt des zuvor bestimmten Koeffizienten
M deltaax um den Betrag der Abweichung der Querruder.
Es ist erwähnenswert, dass bei der Bestimmung des Koeffizienten
M deltaax Maßwert wurde verwendet
T . In unseren Flugdaten wurde die Winkelgeschwindigkeit in Grad pro Sekunde gemessen, während
JSBSim Radiant pro Sekunde verwendet, also den Koeffizienten
M deltaax muss auf die gewünschte Abmessung reduziert werden, d. h. durch 180 Grad geteilt und mit multipliziert werden
pi Bogenmaß. Wir schreiben diese Komponenten des Moments der aerodynamischen Kräfte innerhalb der Produktfunktionen des
Produkts auf . Bei der Modellierung wird das Ergebnis aller Funktionen aufsummiert und der Wert der Projektion des aerodynamischen Moments auf die entsprechende Achse erhalten.
Sie können das erstellte Modell anhand der experimentellen Daten überprüfen, die Sie während der Flugtests erhalten haben. Erstellen Sie dazu ein Skript mit folgendem Inhalt:
<?xml version="1.0" encoding="utf-8"?> <runscript> <use aircraft="ownPlane1" initialize="scripts/airborne"/> <run start="0" end="51" dt="0.01"> <event name="Trims"> <condition> sim-time-sec ge 0.0 </condition> <set name="simulation/do_simple_trim" value="5"/> </event> <event name="Time Notif" continuous="true"> <description>Provide a time history input for the aileron</description> <condition> sim-time-sec ge 0</condition> <set name="fcs/aileron-cmd-norm" > <function> <table> <independentVar lookup="row">sim-time-sec</independentVar> <tableData> 0 0.00075 0.1 0.00374 0.2 -0.00075 0.3 -0.00075 0.4 -0.00075 0.5 -0.00075 0.6 0.00075 0.7 0.00075 ... 48.8 -0.00075 48.9 0.00000 49 -0.00075 </tableData> </table> </function> </set> </event> </run> </runscript>
wobei Punkte auf fehlende Daten hinweisen. In der uns aus dem vorherigen Artikel bekannten Skriptdatei wurde ein neuer Ereignistyp (
„Time Notif“ )
angezeigt , mit dem Sie eine kontinuierliche zeitliche Änderung des Parameters festlegen können. Die Abhängigkeit des Parameters von der Zeit wird durch die Tabellenfunktion eingestellt.
JSBSim interpoliert den Funktionswert linear zwischen den Tabellendaten. Das Überprüfungsverfahren des Rollbewegungsmodells besteht darin, dieses Skript für das erstellte Modell auszuführen und die Ergebnisse mit den experimentellen zu vergleichen.
Das Überprüfungsergebnis ist in der Abbildung dargestellt:

Wie aus der Abbildung ersichtlich ist, ist die Übereinstimmung des Modells mit der Realität etwas weniger als vollständig.
Kontrollsynthese für die Fassleistung
Nach Erhalt des Modells kann leicht festgestellt werden, wie viel und wie lange die Querruder ausgelenkt werden müssen, um den „Lauf“ fertigzustellen. Eine Option ist der folgende Abweichungsalgorithmus:
- t=0 : Querruder beginnen von einer neutralen Position abzuweichen;
- t=0.1 textc : Querruder um 50% abgelehnt;
- t=1.3 textc : Querruder beginnen in eine neutrale Position abzuweichen;
- t=1.4 textc : Querruder im Leerlauf.
Das Vorhandensein von Segmenten mit einer Dauer von 0,1 s zu Beginn und am Ende des Querruderauslenkungsalgorithmus simuliert die Trägheit des Servoantriebs, der Oberflächen nicht sofort auslenken kann. Das Modell zeigt, dass mit einem solchen Gesetz der Querruderauslenkung das Flugzeug eine volle Umdrehung um die Achse
OX ausführen muss.
Flugversuch
Das resultierende Querrudersteuergesetz wurde in einen in einem Flugzeug montierten Autopiloten programmiert. Die Idee des Experiments ist einfach: Bringen Sie das Flugzeug in den Horizontalflug und verwenden Sie dann das erhaltene Kontrollgesetz. Wenn die tatsächliche Bewegung des Flugzeugs entlang der Rolle dem erstellten Modell entspricht, muss das Flugzeug einen „Lauf“ ausführen - eine volle Umdrehung von 360 Grad.
Wir danken unserem treuen Piloten für seine Arbeit, Professionalität und einen komfortablen Kofferraum auf einem Universalwagen!
Während des Experiments wurde klar, dass das Rollmodell erfolgreich gebaut wurde - das Flugzeug führte einen „Lauf“ nach dem anderen durch, sobald der Pilot das programmierte Steuergesetz aktivierte. Die folgende Abbildung zeigt die Winkelgeschwindigkeit
omegax Während des Experiments aufgezeichnet und aus den Simulationsergebnissen sowie dem Fersen- und Nickwinkel aus dem Flugversuch erhalten:

Die folgende Abbildung zeigt die im Flugversuch aufgezeichneten Signale für Querruder, Höhenruder (RV) und Seitenruder (RN):

Die vertikalen Linien geben die Momente des Beginns und des Endes der Ausführung des "Fasses" an. Aus den Zahlen ist ersichtlich, dass der Pilot während der Ausführung des „Laufs“ nicht in die Steuerung von Höhenruder und Ruder eingreift. Es ist auch klar, dass der Nickwinkel während der Ausführung des „Laufs“ immer tendenziell abnimmt - das Flugzeug zieht Sie in einen Tauchgang, wie aus den Simulationsergebnissen hervorgeht im Flugsimulator (siehe Artikel
"Flug UAV. Wie man ein Fass macht" ). Wenn Sie die vorherigen Grafiken sorgfältig betrachten, wird klar, dass der dritte „Lauf“ noch nicht fertig war, da der Pilot die Kontrolle übernahm, um das Flugzeug aus dem Tauchgang herauszuholen: Der Nickwinkel ändert sich so stark, wenn der „Lauf“ nur von Querrudern ausgeführt wird.
Bemerkungen
- Die gebauten selbstfahrenden Geschütze zur Ausführung des "Laufs" berücksichtigen nicht die Abhängigkeit der Ableitungen des Rollmoments von der Fluggeschwindigkeit. Dies geschah zum einen, um das Modell und das Gesetz des Managements nicht zu komplizieren. Andererseits ist eine solche Abhängigkeit anstelle von Derivaten leicht einzuführen M omegaxx und M deltaax Mengen verwenden M omegaxx/V2 und M deltaax/V2 bei einer bestimmten Fluggeschwindigkeit definiert V .
- Das entwickelte Steuergesetz ist eine Programmsteuerung ohne Rückmeldung. Das Vorhandensein einer Rückmeldung über die Winkelgeschwindigkeit und / oder den Rollwinkel verbessert die Genauigkeit der Figur, was in Zukunft erfolgen wird.
Schlussfolgerungen
Als Ergebnis unserer Arbeit haben wir eine der Möglichkeiten aufgezeigt, ein Bewegungsmodell eines UAV in Winkelgeschwindigkeit zu erstellen
omegax . In einem Flugexperiment wurde nachgewiesen, dass das erstellte Bewegungsmodell mit dem simulierten Objekt übereinstimmt. Auf der Grundlage des entwickelten Modells wird das Gesetz der Programmsteuerung erhalten, das es ermöglicht, das "Fass" im automatischen Modus auszuführen. Wir haben auch dafür gesorgt, dass es nicht möglich ist, den richtigen „Lauf“ nur mit Querrudern zu erreichen, und wir haben dies auch deutlich gezeigt.
Der nächste Schritt wird die Fertigstellung des Steuergesetzes durch Hinzufügen von Rückmeldungen sowie die Einbeziehung der Aufzugssteuerung sein. Letzteres erfordert die Erstellung eines Modells der Längsbewegung unseres Flugzeugs. Basierend auf den Ergebnissen der Arbeit wird die nächste Veröffentlichung veröffentlicht.