In einer früheren Veröffentlichung habe ich einen Überblick über die Geschichte der Konstrukteure der fischertechnik von 1965 bis 2017 gegeben und nun auf Wunsch der Leser einen Überblick über das Set 524328 ROBOTICS TXT Discovery veröffentlicht.

Der Konstruktor 524328 ist für Jungen und Mädchen gedacht, die sich für Mechanik, Automatisierung, Programmierung, Computer Vision oder, wie sie jetzt sagen, für Robotik interessieren.
Der Karton enthält mechanische Teile, Motoren, einen programmierbaren TXT-Controller, eine Videokamera, die ROBO Pro-Software, Montageanleitungen und ein kleines Buch im PDF-Format mit Lehrmaterial.
Für die Zusammenarbeit mit dem Designer benötigen wir außerdem einen 34969-Akku, der einen NiMH-Akku und ein Ladegerät enthält.
Bevor ich jedoch zu einer detaillierten Beschreibung des Kits übergehe, empfehle ich Ihnen, sich mit der Geschichte des ersten fischertechnik-Designers vertraut zu machen, der sich der Robotik widmet.
Hintergrund
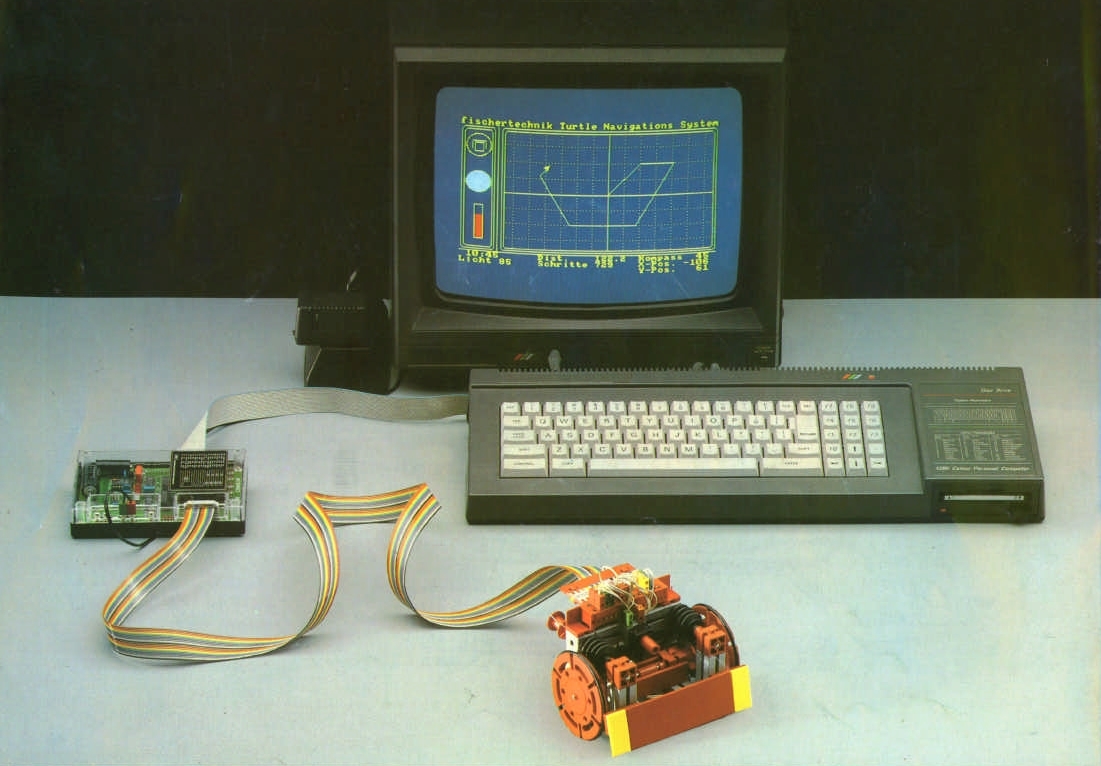
Der erste fischertechnik-basierte Designer, der sich der mobilen Robotik widmete, erschien 1983 im Rahmen eines experimentellen Bildungsprojekts, das zu dieser Zeit in Großbritannien durchgeführt wurde.
Das Unternehmen Economatics, das an dem Projekt arbeitete, machte auf die Arbeit eines jungen Wissenschaftlers vom MIT Seymour Peypert (1928-2016) aufmerksam, der das Ausmaß der bevorstehenden Revolution auf dem Gebiet der Computertechnologie vorhersagte und vorschlug, Kinder bereits in jungen Jahren mit dem von seinem Team entwickelten Training vertraut zu machen Programmiersprache Logo .
Ein wichtiges Merkmal von Logo war die benutzerfreundliche Oberfläche der Laufzeitumgebung und das Vorhandensein eines virtuellen Steuerobjekts in dieser Umgebung - einer grafischen „Schildkröte“, die sich gemäß den Befehlen des kompilierten Programms auf dem Computerbildschirm bewegen und Spuren hinterlassen konnte. Übrigens hat sich diese Arbeit von Herrn Peypert viele Male verändert und ist bis heute in Form einer Lernprogrammierumgebung namens Scratch erhalten geblieben (darüber werden wir später sprechen).
In der als Ergebnis vorgeschlagenen Lösung wurde daher vorgeschlagen, die virtuelle Schildkröte durch ein sehr reales Objekt zu ersetzen - einen mobilen Wagen. So haben die Studierenden die Möglichkeit, sich nicht nur mit Programmiertechnologien vertraut zu machen, sondern auch die Grundlagen der Robotik zu erlernen. So erschien das erste BBC Buggy Set:
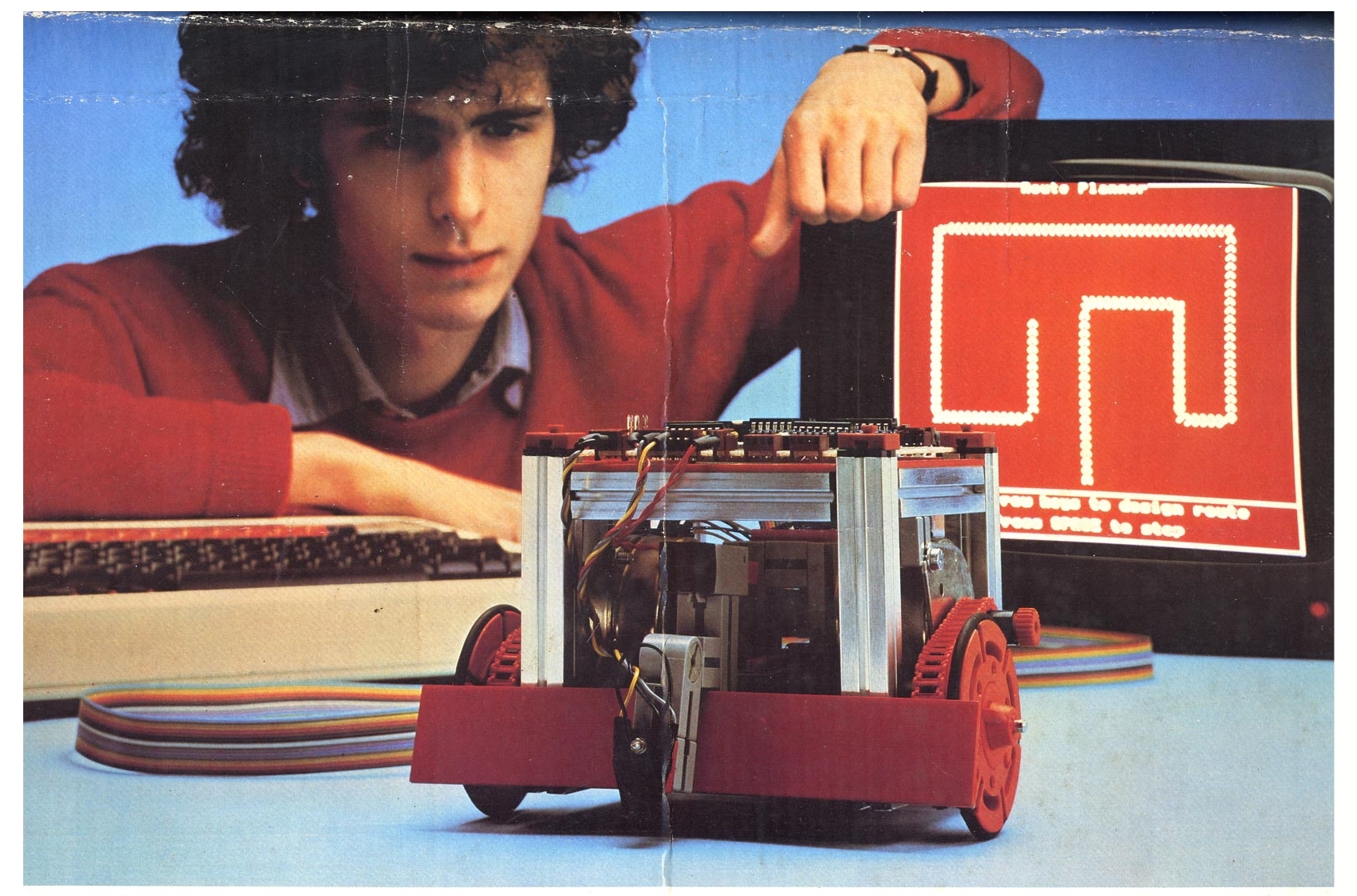
Das Kit enthielt fischertechnik Teile für die Montage des Wagens, eine Steuerplatine, einen Träger mit Beispielen für Steuerprogramme und Anweisungen mit Schulungsaufgaben. Die Steuerkarte wurde mit einem Flachkabel an den Computer angeschlossen. Wir können sagen, dass es ein gemeinsames Projekt fischertechnik + Economatics war.
Fischertechnik brachte 1987 das erste vollständig proprietäre Roboterexperiment-Kit auf den Markt - das 39502 Computing-Experimental. Aus dem Set konnten mehrere Varianten von Automaten gebaut und Steuerungsalgorithmen programmiert werden
Es folgten die nächste Generation von Designern und zusätzliche Sets zur Funktionserweiterung. Für diese Geschichte ist jedoch ein separater Artikel erforderlich. Heute schlage ich vor, das aktuelle Set - 524328 ROBOTICS TXT Discovery Set - genauer zu betrachten
524328 ROBOTICS TXT Discovery-Set
Der Designer 524328 besteht aus 310 Teilen, aus denen 14 Modelle für Experimente gebaut werden können. Neben Montageanleitungen und einer CD mit ROBO Pro-Software enthält die Box auch Rohlinge zum Zusammenbau eines Testgeländes zum Testen mobiler Roboter. Traditionell wird das Set von einem Minibuch im PDF-Format begleitet, aus dem Sie grundlegende Informationen aus dem Bereich der Robotik erhalten.
Aussehen der Verpackung:

Im Karton werden die Teile in zwei Plastikhütten in getrennten Fächern aufbewahrt. Wenn Sie möchten, können Sie zusätzlich ein proprietäres Lagersystem erwerben und Substrate verwenden, um Teile zu sortieren, die leicht mit einer Schere aus der Montageanleitung geschnitten werden können.
Für den Einsatz in Bechern und Schulen ist dieser Designer in bequemeren und haltbareren Kunststoffbehältern Gratnells verpackt und hat eine andere Bestellnummer - 533018.

Neben einfachen Strukturelementen enthält die Teileliste zwei Servomotoren mit eingebauten Encodern, einen herkömmlichen Gleichstrommotor mit externem Getriebe, einen Fototransistor, einen Thermistor, Busse, LEDs und eine orangefarbene Kugel für Experimente mit einem Computer-Vision-System:

(durch Klicken auf das Bild - Hirez)
Programmierbarer TXT-Controller
Die Steuereinheit im Designer 524328 besteht aus einem kompakten Computer, der auf dem ARM Cortex A8-Prozessor und einer integrierten Eingabe-Ausgabe-Karte des ARM Cortex M3 basiert. Für die Interaktion mit dem Benutzer verfügt das Gerät über einen 2,4-Zoll-Touchscreen mit 320 x 240 Farben und Hintergrundbeleuchtung. Darüber hinaus verfügt der Computer über einen eingebauten Lautsprecher und eine RTC mit Notstrom aus einer Lithiumbatterie.
TXT-Controller:

Der TXT-Controller wird unter dem Linux-Kernel-Betriebssystem ausgeführt. Bei Bedarf können Sie Ihr Betriebssystem von einer Plug-in-Micro-SD-Speicherkarte starten .
Die Erinnerung
- 128 MB DDR3-RAM
- 64 MB FLASH
- Micro sd
- USB-Massenspeichergerät
Kommunikation
Die Controller-Schnittstellen haben die folgenden Schnittstellen:
- Bluetooth 2.1 EDR + 4.0
- WLAN 802.11 b / g / n
- USB-Mini-Anschluss zum Anschließen an einen Computer
- USB-A-Anschluss mit Host-Controller-Funktion zum Anschließen einer USB-Kamera, eines USB-Flash-Laufwerks und anderer Geräte.
- IR-Fotodetektor für die Fernbedienung aus dem Kit „Remote Control Kit“
- I2C-Schnittstelle
- UART-Schnittstelle
- CAN-Schnittstelle
Eingabe-Ausgabe
- Universaleingänge: 8 Stück digital / analog 0-9V oder 0-5 kOhm
- Zähleingänge: 4 Stück (0-9V Fin <1 kHz)
- Universalausgänge (PWM 9V / 0,25A): 8 Stück
Nur für den Fall, das Innere des TXT-Controllers ist im Bild unten zu sehen:
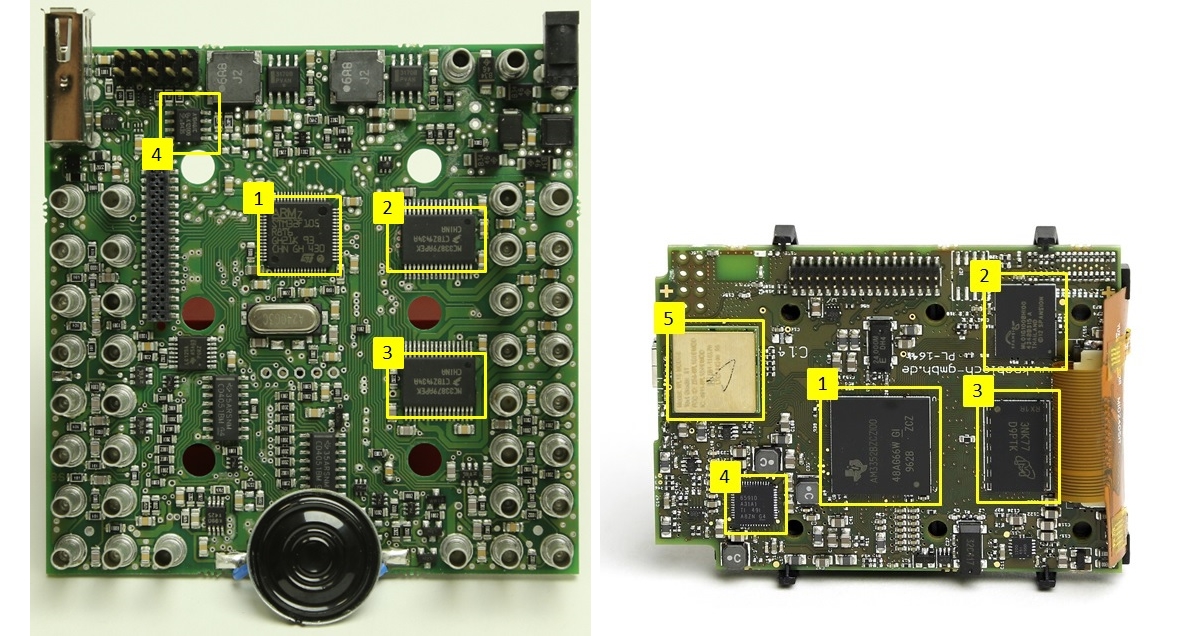
Auf der linken Platine:
- ST STM32F105R8T6 - ARM Cortex-M3-Mikrocontroller.
- MC33879 - Ausgabetreiber.
- MC33879 - Ausgabetreiber.
- TJA1040 - Serieller CAN-Bus- Treiber .
Auf der rechten Platine:
- TI AM3352B - ARM Cortex-A8 Mikrocontroller.
- Spansion ML01G100 - SLC NAND FLASH 64 MB.
- Samsung K4B2G - DDR3L 1600 DRAM 128 MB
- TPS65910 - Energieverwaltungsmodul.
- WL18MODGB (5) kombiniertes WiFi + Bluetooth-Modul.
Ein wichtiges Merkmal dieses Kits ist die Verfügbarkeit von Hardware und Software für Experimente mit Computer Vision. Zu diesem Zweck verfügt das Kit über eine Videokamera mit USB-Schnittstelle, und die ROBO Pro-Tool-Software verfügt über eine Bibliothek mit Computer Vision-Funktionen und einen Konfigurator für die Einrichtung und Inbetriebnahme.

Die Computer Vision-Bibliothek enthält die folgenden Grundfunktionen für die Verarbeitung von Videobildern:
- Berechnung der durchschnittlichen Helligkeit eines bestimmten Bereichs eines Videorahmens.
- Suchen Sie nach einer Folge von Rasterelementen derselben Farbe für einen bestimmten Bereich eines Videorahmens.
- Suche nach einer geometrischen Figur, Berechnung von Koordinaten und Größen.
- Ein Bewegungsmelder in einem Bereich eines Videorahmens.
Der in der ROBO Pro-Software enthaltene Computer Vision-Subsystemkonfigurator:

ROBO Pro Tooling Software
Zur Entwicklung von Steuerungsprogrammen für die TXT-Steuerung wird die Verwendung der Lernwerkzeugsoftware ROBO Pro vorgeschlagen, die einen Editor für Blockdiagramme von Algorithmen, eine Bibliothek grundlegender Programmelemente, eine Bibliothek von Anwendungsfunktionen, Werkzeuge für die Inbetriebnahme und die Fernsteuerung enthält. Die ROBO Pro-Software ist Teil des Design-Kits. Separat ist es nicht erforderlich, es zu kaufen.
In der Regel sieht das Editorfenster wie folgt aus:
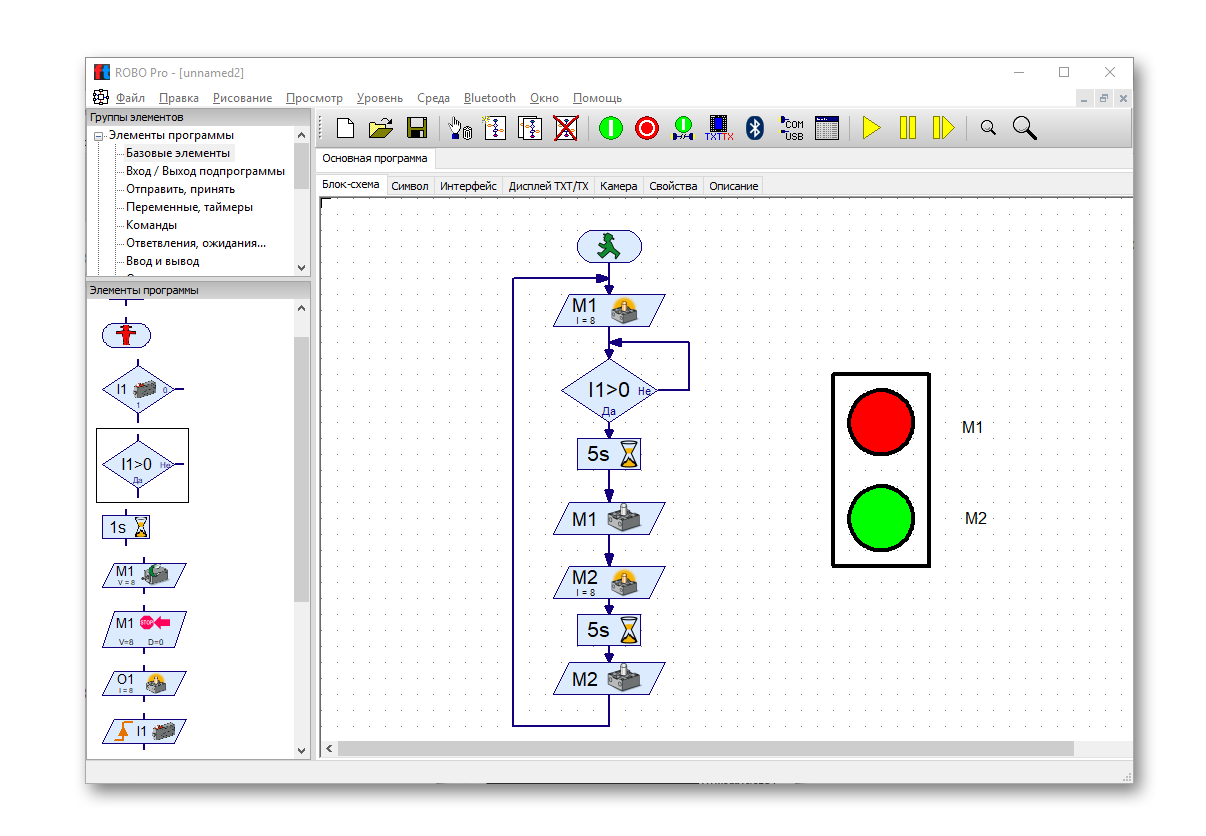
Steuerungsalgorithmen werden in Form herkömmlicher klassischer Flussdiagramme zusammengestellt - wie es in der Fachliteratur und in der technischen Dokumentation üblich ist. Sie können mich natürlich vernünftigerweise fragen: - Was ist mit Scratch? Warum ist es in der Dokumentation für MK ATMEL- oder PLC SIMATIC-Algorithmen in Form von Flussdiagrammen und nicht in Form von Scratch-Schaltkreisen dargestellt? Hier kann ich Ihnen kaum vernünftig antworten. Mein interner Ingenieur freut sich jedoch über die Möglichkeit, ein allgemein anerkanntes visuelles Werkzeug auf natürliche Weise für die erste Bekanntschaft von Kindern mit automatischen Steuerungstechnologien zu verwenden.
Nur für den Fall, die Algorithmen aus der technischen Dokumentation :

Die im Editor kompilierten Flussdiagramme können in zwei Modi ausgeführt werden - lokal auf der Instrumentenmaschine oder remote durch Herunterladen auf die Zielmaschine. Die erste Methode eignet sich zum Debuggen. Während der Ausführung des Algorithmus können Sie die schrittweise Ausführung verwenden und den aktuellen Schritt des Algorithmus hervorheben.
Für fortgeschrittene Benutzer bietet ROBO Pro Unterstützung für Multithread-Algorithmen. Die Zerlegung von Algorithmen in Prozeduren wird ebenfalls unterstützt, und es gibt auch Elemente der Benutzeroberfläche, die direkt auf den Flussdiagrammblättern platziert werden können.
Die Bibliothek der Benutzeroberflächenelemente verfügt über einen Rekorder / ein Oszilloskop, Messuhren und Felder zur Eingabe und Ausgabe digitaler Werte. Dies ist eine sehr wichtige Funktion für Anfänger und Fortgeschrittene. Die Möglichkeit, Daten in Echtzeit aufzuzeichnen und anschließend zu analysieren, vereinfacht das Studium neuer Steuerungsalgorithmen erheblich und verkürzt die Rüstzeit erheblich.
So sieht das Editorfenster bei einem komplexeren Projekt aus:
Zusätzliche Sätze
Die Funktionalität des Kits 524328 kann um zusätzliche Kits aus der ROBOTICS-Serie erweitert werden:
Sie unterscheiden sich vom 524328-Konstruktor, wenn kein TXT-Controller vorhanden ist. Es wird angenommen, dass der Übergang zu diesen Sätzen erfolgt, nachdem alle Probleme aus Satz 524328 gelöst wurden.
Projektbeispiele
Ich habe mehrere Videos vorbereitet, die einige (aber keineswegs alle) Möglichkeiten des Standardkonstruktors TXT Discovery ohne zusätzliche Details aufzeigen. Alle Projekte aus den Beispielen sind auf dem Github . Gerne beantworte ich Ihre Fragen in den Kommentaren.
Zwei einfache Ampelalgorithmen:
Fernbedienung über Benutzeroberflächenelemente und Videoübertragung in ROBO Pro:
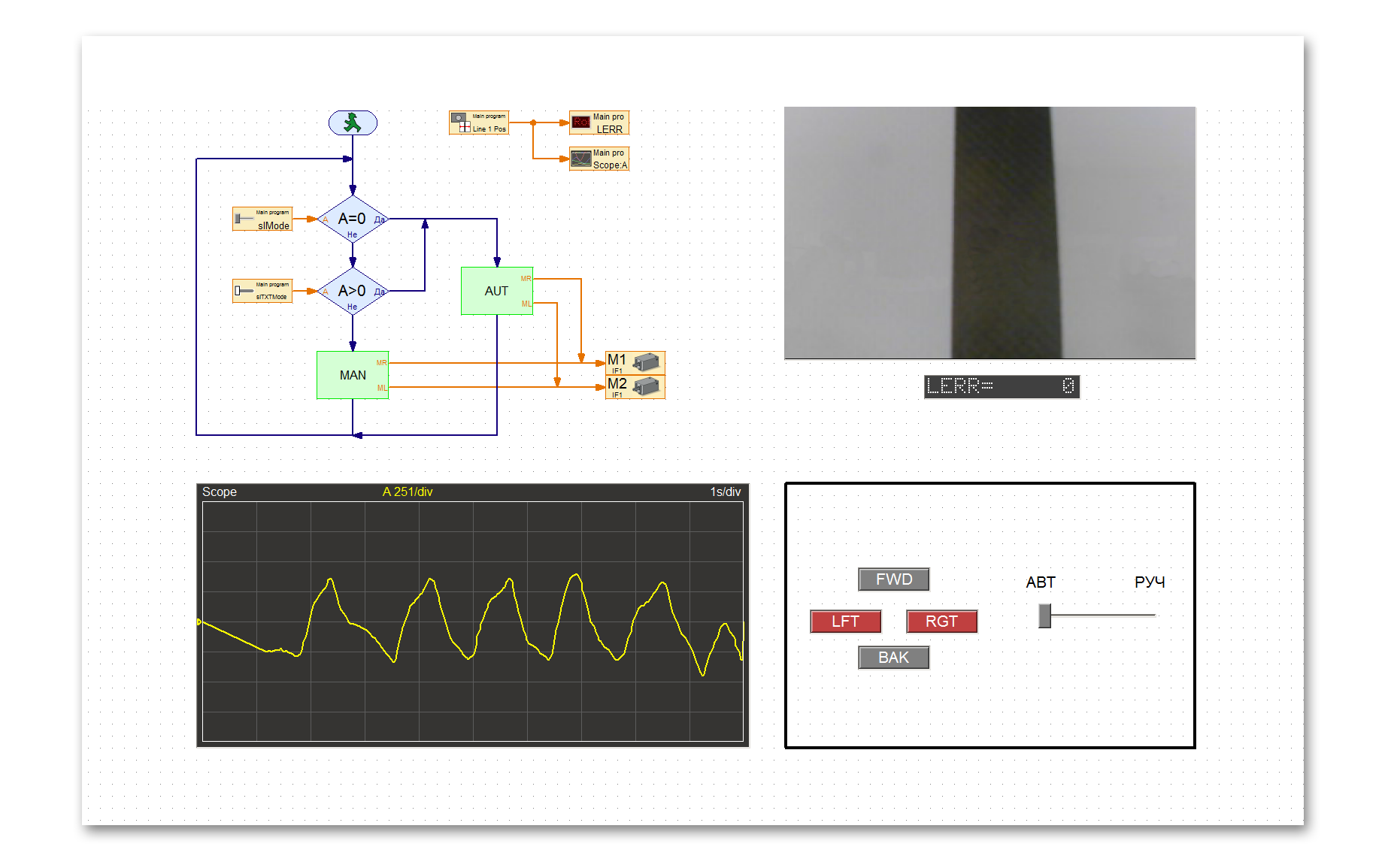
Automatische Steuerung des Wagens mit Feedback basierend auf Computer Vision. Es wird das proportionale Regelungsgesetz angewendet. Die Verstärkung der Proportionalverbindung KP = 3,5. Es ist zu sehen, dass sich der Wagen auf der Strecke unruhig bewegt - er schwankt und verlässt schließlich die Strecke. Achten Sie auf den Parameter Logger. Sie können den Wert des Überschwingens nach dem Stoppen der Bewegung quantifizieren:
Der Grund für das instabile Verhalten ist, dass beim Drehen des Wagens Trägheitskräfte auftreten, die den Wagen weiter drehen, selbst wenn die Steuerwirkung von der Proportionalverbindung Null ist. Als Ergebnis sehen wir, wie der Wagen die Leine rutscht und sich dann in die entgegengesetzte Richtung dreht - im dynamischen System treten Schwingungen auf. Dieses Verhalten verringert die Qualität der Kontrolle erheblich und kann in einigen Fällen zum Ausfall führen.
Um den Trägheitskräften entgegenzuwirken, wird der Struktur des Reglers ein Differenzierungselement hinzugefügt, das ein Signal bildet, das proportional zur Änderung der Fehlanpassung am Eingang des Reglers ist. Stellen Sie den Koeffizienten KD = 6,0 ein und sehen Sie, wie sich der Wagen verhält:
Jetzt passiert der Roboter stetig die Strecke. Achten Sie auf das grüne Signal am Rekorder - dies ist das Ausgangssignal der Differentialverbindung des Reglers, das dazu beiträgt, die Drehung des Roboters zu verlangsamen, wenn er zur Flugbahn zurückkehrt.
Fazit
Oben habe ich einige Beispiele für die Verwendung des 524328 ROBOTICS TXT Discovery-Sets angegeben , um praktische Übungen zur Theorie der automatischen Steuerung zu organisieren. Die angegebenen Beispiele waren sehr trocken und ohne theoretische Berechnungen. Ich denke, dass ich in einer der folgenden Veröffentlichungen meine Best Practices in Bezug auf die Organisation von praktischen Kursen in Automatisierung mit fischertechnik-Konstruktoren teilen kann. Würden Sie sich dafür interessieren?
Wie üblich gilt für Technikliebhaber, die den gesamten Beitrag beherrschen, bis zum 31.12.2017 ein Rabatt von 15% auf den Code gktms1712, einschließlich im Pakpak- Store. Ehre sei den Robotern!
Referenzen
- Die Geschichte der BBC Buggy Training Turtle von 1983
- Seymour Papert - Erfinder der Logo-Sprache
- Benutzerdefinierte Betriebssystemerstellung für TXT-Controller
- Kratzer für TXT-Controller
- Python für TXT-Controller