Shakey wurde in den 60er Jahren entwickelt und war der erste mobile Roboter, der seine Aktionen analysieren konnte. Die ehrgeizigen Ziele des Projekts wurden nicht vollständig erreicht, es hatte jedoch einen großen Einfluss auf die Weiterentwicklung der Robotik.
Die Autoren des Shakey-Projekts beschrieben in einem großen Artikel des AI Magazine, wie die Robotersteuerung angeordnet wurde. In diesem Beitrag - die Übersetzung des interessantesten und wichtigsten Textfragments. Sein Autor Peter Hart war Mitglied des Entwicklungsteams. Shakey erstellen
Das Shakey-Projekt wurde im Januar 1965 auf Initiative des Zentrums für künstliche Intelligenz am Stanford Research Institute (SRI International) ins Leben gerufen. Das Institut schlug die Entwicklung einer „intelligenten Maschine“ für Intelligenzanwendungen vor. Die Arbeitsgruppe hatte jedoch eine andere Motivation. Sie wollten eine Teststelle schaffen, um alle Bereiche der künstlichen Intelligenz miteinander zu verbinden (systemische Repräsentation, Argumentation, Planung, maschinelles Lernen, Computer Vision und Verständnis der natürlichen Sprache).
Bei der Entwicklung von Shakey orientierten sich die Ingenieure an zwei Regeln:
- Die Mechanik muss so einfach wie möglich gehalten werden. Daher wurde kein einziger Manipulatorarm am Roboter installiert.
- Um später nicht an der Reduzierung des Designs zu arbeiten, wurde das Elektronik-Rack oben installiert.
Da Shakeys mechanische und sensorische Fähigkeiten begrenzt waren, schuf das Projektteam eine robuste, einfache experimentelle Umgebung für den Roboter - ein halbes Dutzend Räume mit großen geometrischen Blöcken im Inneren. Die Blöcke wurden bemalt, um von einer Kamera mit niedriger Auflösung erkannt zu werden.
Der erste Computer für Shakey war der SDS 940 mit weniger Speicher als der L2-Cache moderner Laptops. 1970 wurde es durch das leistungsstärkere DEC PDP-10 ersetzt. Shakey sprach über einen Kommunikationsprozessor mit dem PDP-10. Dieses System war einer der Knotenpunkte, die zur Geburt von ARPANET beigetragen haben. Etwa zur gleichen Zeit begann ein komplettes Umschreiben der Shakey-Software. Eisen brauchte nur minimale Verbesserungen.
Wichtige Shakey-DesignelementeShakey Software
Die zweite Version des Produkts basiert auf zwei Grundgedanken. Die erste besteht darin, die Welt von Shakey durch
Prädikatenrechnung erster Ordnung darzustellen und die Form durch ein Gittermodell zu ergänzen - eine Schlüsselkomponente der ersten Version.
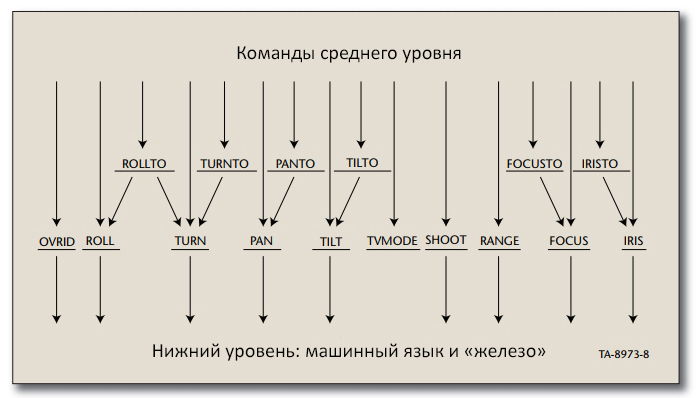
Die zweite Idee war, die Shakey-Software in mehrere Ebenen zu strukturieren. Dieser Ansatz zur Steuerung des Roboters wurde erstmals angewendet. Als nächstes beschreiben wir kurz jede Ebene, beginnend mit Befehlen niedrigerer Ebene.
Teams auf niedrigerer EbeneBefehle niedrigerer Ebenen wie ROLL und PAN wurden direkt an die Shakey-Hardwarekomponente gesendet. Auf dieser Ebene befinden sich auch Teams wie PANTO, die dafür verantwortlich waren, den „Kopf“ des Geräts in die ausgewählte Richtung zu drehen.
 Mittlere Teams: Markov-Ketten
Mittlere Teams: Markov-KettenAuf dieser Ebene befinden sich Teams wie GOTHRUDOOR („durch die Tür gehen“). Sie wurden einer separaten Ebene zugeordnet, da sie alle als
Markov-Ketten dargestellt wurden .
Markov-Kette für das GOTHRUDOOR-TeamMarkov-Ketten können "gelesen" werden, indem zuerst die linke Spalte gescannt wird, bis die erste wahre Bedingung erreicht ist, die die entsprechende Aktion ausführt, und dann zum Anfang der Tabelle zurückgekehrt wird. Dementsprechend zeichnen sich Markov-Ketten durch Stabilität aus (dieser Aktionsalgorithmus ist leicht vereinfacht, aber die Praxis der „Rückkehr zum Anfang“ ist grundlegend und, wie wir sehen werden, ein wichtiges Merkmal dieser Ketten).
Wenn Teams auf mittlerer Ebene die letzten wären, die Shakey ausführen könnte, wäre der Roboter in seinen Aktionen sehr eingeschränkt. Er konnte nur Ziele erreichen, die nur eine vorprogrammierte Aktion erfordern. Um mehr zu tun, musste Shakey in der Lage sein, eine Abfolge von Aktionen (als Plan) zu erstellen. Verantwortlich dafür war der automatische Scheduler STRIPS (Stanford Research Institute Problem Solver). Er war die nächsthöhere Software.
STRIPS, Problemlöser des Stanford Research InstituteDer automatische Scheduler STRIPS ist aufgrund der Kombination zweier großartiger Konzepte entstanden. Die erste war eine Planungsstrategie namens Analyse von Zielen und Mitteln. Es wird im System „General Problem Solver“ von Herbert Simon und Allen Newell vorgestellt.
Das zweite Konzept war der Beweis des Satzes in der Prädikatenrechnung und seine Anwendung in Frage-Antwort-Systemen. Dies wird in der Arbeit von Cordell Green diskutiert. Richard Fykes und Niels Nielson kombinierten dieses Wissen, um 1971 STRIPS zu erstellen, bei denen zur Berechnung von Prädikaten Ziel- und Mittelwertanalysen verwendet wurden.
PLANEX, Plan Execution ExecutiveKurz nach der Erstellung von STRIPS fand das Institutsteam einen Weg, den STRIPS-Plan zu verallgemeinern, indem die Konstanten im System durch Variablen ersetzt wurden. Sie erfanden auch eine Datenstruktur namens Dreieckstabelle, die die internen Abhängigkeiten eines generischen Plans demonstriert. Diese Entwürfe bildeten die Grundlage des PLANEX-Systems, der neuesten Stufe der Shakey-Software (Fykes, Hart und Nielson, 1972).
Mit dieser Software kann PLANEX die tatsächliche Umsetzung des Plans überwachen. Das System kann feststellen, wenn ein Fehler aufgetreten ist, und die Arbeit von diesem Moment an neu planen, wobei Teile des vorhandenen Plans nach Möglichkeit wiederverwendet werden. Es kann sogar eine „unternehmerische“ Entscheidung sein: Wenn Shakey plötzlich näher an der Erfüllung seiner Aufgabe ist, kann er sie zu seinem Vorteil nutzen.
Diese Fähigkeit, Fehler zu erkennen und zu beheben, war ein kritischer Bestandteil der Shakey-Software. Es gibt einen großen Unterschied zwischen der Erstellung eines Aktionsplans für einen realen Roboter, der in der realen Welt funktioniert, in der möglicherweise etwas schief geht, und einem „abstrakten“ Planer, der nur einen symbolischen Plan druckt. Die Ketten PLANEX und Markov wurden zur Lösung für eine zuverlässige und reale Planung.
Shakey Software Level HierarchieComputer Vision
Der ursprüngliche Projektplan erforderte keine intensive Forschung auf dem Gebiet der Bildverarbeitung. Vielmehr war geplant, vorhandene Computer-Vision-Techniken in eine experimentelle Plattform zu integrieren. Wie sich herausstellte, gab es zu dieser Zeit nur sehr wenige verfügbare Technologien, so dass die Spezialisten auf dem Gebiet der Computer-Vision-Forschung hart arbeiten mussten.
Eines der wichtigen Ergebnisse dieser Arbeit war die Erfindung der sogenannten modernen Form der Hough-Transformation, einer Methode zum Extrahieren von Elementen aus einem Bild (R. Duda, P. Hart, 1972). Dies wurde erreicht, indem zwei Konzepte kombiniert wurden, die auf den ersten Blick völlig unabhängig zu sein scheinen.
Die erste Idee ist im Paul Hough-Patent enthalten. Es beschreibt die Transformation von Punkten in der Bildebene zu geraden Linien im Transformationsraum. Die Schnittlinien in letzteren entsprechen kollinearen Punkten in der Form. Es tritt jedoch das Problem endloser Steigungen auf, was diese Transformation rechenintensiv macht.
Die zweite Idee stammt aus der sogenannten Integralgeometrie. Die Mathematiker hatten theoretische Gründe, die Parametrisierung des Winkelradius der Linie anstelle des bekannteren Steigungsabschnitts von Hough zu verwenden. Peter Hart bemerkte, dass beim Ersetzen der linearen Hough-Transformation durch eine sinusförmige nicht nur das Problem der unendlichen Steigungen gelöst wird, sondern die neue Transformation für die Wahl der Koordinaten unveränderlich ist. Darüber hinaus haben Peter Hart und Richard Duda diese Methode erweitert, um analytische Kurven in Bildern zu erkennen, und diese Transformation wird seitdem verwendet.
Navigation und A * -Algorithmus
Shakey musste sich auf das Gelände konzentrieren, daher wurden mehrere Algorithmen für kürzeste Wege entwickelt. Einer von ihnen, A * genannt, wurde von Peter Hart, Niels Nielson und Bertram Raphael geschaffen. Der neue Algorithmus hatte sehr nützliche Eigenschaften: Erstens fand er immer den kürzesten Weg und zweitens wählte er die minimale Anzahl alternativer Möglichkeiten aus. Wir können sagen, dass es immer funktioniert und rechnerisch effizient ist.
Sie könnten denken, dass ein so bedeutendes Ergebnis jede Veröffentlichung mit Vergnügen begrüßen würde, aber es stellte sich umgekehrt heraus. Die Präsentation des A * -Algorithmus wurde von allen renommierten wissenschaftlichen Fachzeitschriften der Zeit abgelehnt.
Wenn Sie sich diese alten Rezensionen ansehen, könnten Sie denken, dass die Herausgeber den Mathematikern wegen all dieser beängstigenden Theoreme einen Bericht zum Lesen gegeben haben. Die Mathematiker waren jedoch nicht beeindruckt, da aus den Beweisen nur Graphen mit einer endlichen Anzahl von Knoten dargestellt wurden. Zu dieser Zeit schien es den Autoren, dass Mathematiker den Unterschied zwischen einem Diagramm mit zehn Knoten und einem Diagramm mit zehn Billionen Knoten nicht sahen. Für Wissenschaftler auf dem Gebiet der Informatik ist dieser Unterschied jedoch erheblich.
Am Ende wurde der Bericht am Institut für Elektrotechnik- und Elektronikingenieure (IEEE-Transaktionen zu Systemwissenschaften und Kybernetik) angenommen und wird seit mehr als 45 Jahren referenziert.
Welt zu dieser Zeit
Das Obige gibt einen Überblick über den Teil (wenn auch weit entfernt vom gesamten Band!) Der Arbeit des Shakey-Projektteams. Um eine Vorstellung von dieser Arbeit in einem breiteren sozialen Kontext zu bekommen, betrachten wir das intellektuelle und kulturelle Klima dieser Zeit.
1970 wurde im beliebten Life-Magazin ein großer Artikel über das Shakey-Projekt veröffentlicht. Der Autor, der Journalist Brad Darrach, scheint mit der Überschrift zu weit gegangen zu sein: "Die faszinierende und schreckliche Realität einer Maschine mit eigenem Verstand." Während einige glaubten, dass Roboter die Welt versklaven könnten, standen andere solchen Artikeln ziemlich skeptisch gegenüber. Hubert Dreyfus war einer von denen, die aus philosophischer Sicht argumentierten, dass das Konzept der KI grundsätzlich unrealistisch ist. Und irgendwo zwischen Darrach und Dreyfus gab es diejenigen, die befürchteten, dass Roboter eines Tages menschliche Aufgaben übernehmen könnten.
Shakey's Life Magazine PostShakey Gäste
Die Entwickler des Roboters begrüßten jeden Besucher, der sich für ihre Arbeit interessierte. Eine Überprüfung der erzielten Reaktionen sagt auch viel über den damaligen Zustand der Welt aus. Hier einige Beispiele:
- Eine Gruppe von Schulkindern besuchte das Labor. Der Lehrer, der sie begleitete, fragte, was die Ingenieure „echte Arbeit“ hätten: „Dieser Roboter ist dein Hobby, oder?“
- Der General fragte, ob ein 36-Zoll-Messer am Roboter montiert werden könne.
- Arthur Clarke besuchte das Labor unmittelbar nach der Veröffentlichung des Films "Space Odyssey of 2001", war jedoch mehr daran interessiert, über die Rezension des Films durch die New York Times zu sprechen als über die Zukunft von Robotern.
- Ein Schüler fuhr von Seattle nach Menlo Park in Kalifornien, um Shakey zu sehen. Jahrzehnte später erinnerte sich Bill Gates daran, dass das, was er sah, beeindruckend war.
- Ein Prüfer der US-Regierung fragte, ob sich das SRI wirklich um die Lieferung von Milliarden von "Paketbits" gekümmert habe. Dieser Frage folgten andere, einschließlich der Frage, ob an einem dieser Bits Korrosion festgestellt wurde.
Abschluss des Shakey-Projekts
Das Shakey-Projekt wurde 1972 geschlossen - nicht wegen mangelnder Ideen, sondern wegen mangelnder Finanzierung. Was wurde während seiner Existenz erreicht?
Es gab so viele Meinungen zu diesem Punkt wie es Teammitglieder gab, aber es können verschiedene Verallgemeinerungen vorgenommen werden:
- Viele der privaten Ergebnisse des Projekts (STRIPS, PLANEX, A * -Algorithmus und eine neue Form der Hough-Transformation) sind zu einem bedeutenden technischen Beitrag geworden.
- Insgesamt war Shakey eine bedeutende Leistung. Er war sowohl der erste mobile intelligente Roboter als auch das erste System, das Software mit KI mit physischer Hardware kombinierte.
- Die allgemeinen Fähigkeiten von Shakey in Bezug auf Mechanik und Software haben nicht das Niveau der anfänglichen Bestrebungen erreicht. Dies ist angesichts der anfänglich hohen Ansprüche nicht überraschend. Es dauerte Jahrzehnte, um einige der erklärten Ziele zu erreichen, während andere noch ungelöst sind.
Referenzen:
1. "Shakey: Von der Konzeption zur Geschichte." Originalartikel. Der zweite Teil des Materials befasst sich mit der weiteren Anwendung der Entdeckungen des Shakey-Projekts. Gehe zu
2. "Wie viel braucht es, um Shakey the Robot zu wiederholen?" - Ein Versuch, Shakey unter modernen Bedingungen zu reproduzieren. Gehe zuWeitere Informationen zur Robotik finden Sie unter robo-hunter.com:Populärwissenschaft: