Dieser Beitrag beschreibt, wie an einem Abend ein Tracking-Fokus für einen Spiegel aus Scheiße und Stöcken hergestellt wurde. Video von dem, was passiert ist:
Vorwort
Himbeeren sind hier zweifellos überflüssig. Wenn es sich jedoch um ein komplexeres Gerät handelt, bei dem der Tracking-Fokus nur eine der Funktionen ist, warum dann nicht?
Ich habe mir nichts Neues ausgedacht, ich habe es einfach genommen und an einem Abend gemacht. Das Ergebnis hat mir gefallen, deshalb möchte ich es mit der Community teilen.
Mechanik, montieren
Mechanik ist für mich immer ein Stolperstein. Es kann schwierig sein, Scheiße und Stöcke unter Ihren Armen zu finden, die miteinander kompatibel sind und Ihnen dennoch ermöglichen, Ihr Ziel zu erreichen. Aber diesmal hatte ich Glück.
Der Prototyp sieht ungefähr so aus:
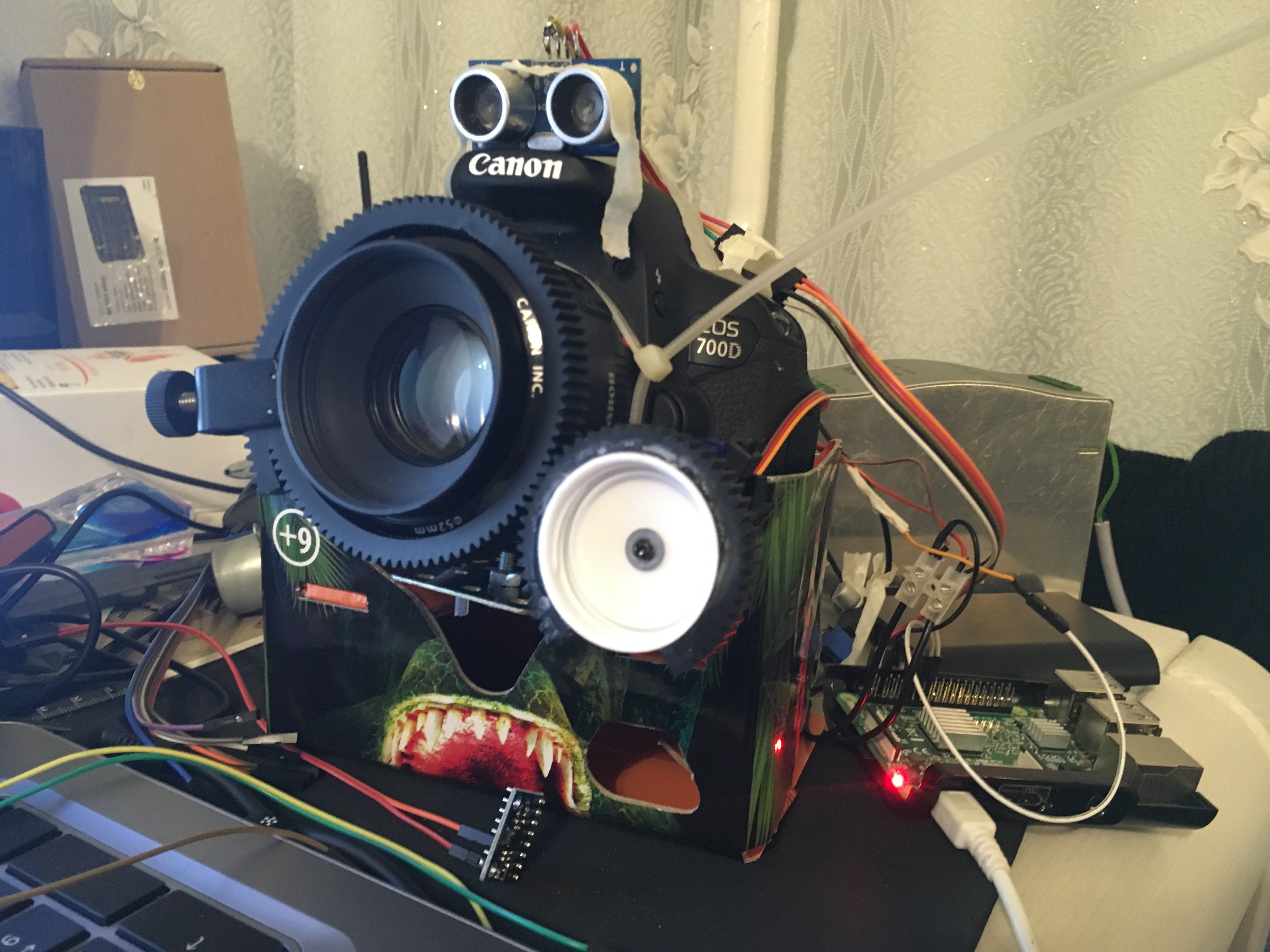
Als Zahnrad auf der Achse des Servers habe ich den Deckel aus der Milchbox verwendet, auf den ich den Rest des Zahnkragens für das SLR-Objektiv geklebt habe. Die Milchkappe in meinem Fall erwies sich als der optimale Durchmesser für die Einstellung auf einem 50-mm-Objektiv. Ich klebte das „Zahnrad“ mit Hilfe von Cyanacrylat mit Soda auf einen der mit dem Servo gelieferten Kipphebel und schraubte es fest. Um die Struktur an der DSLR zu befestigen, benötigen Sie eine Schraube mit einem Zollgewinde, die ich von einem Oktopus-Stativ gefunden habe.
Im Allgemeinen verkörperte sich das Design irgendwie in der Realität:

Ohne Estriche ist es heute schwierig. Das blaue Band endete und ich musste den Sensor auf Papierband montieren.
Elektronik
Ich verwende Raspberry Pi 3 als mein Gehirn. Ich versorge das Servo mit einem separaten 24-VDC-Netzteil mit einem DC-DC-Abwärtswandler an einem LM2596-Mikrokreis mit 7,2-V-Ausgang.
Der Algorithmus der Arbeit ist einfach zu blamieren. Es gibt eine Rückmeldung über die Entfernung zum Objekt vom Ultraschall-Entfernungsmesser HC-SR04, der in einen Drehwinkel des Servos SG-90 umgewandelt wird. Auf der Achse der Servos ist ein „Zahnrad“ befestigt, das die Linse durch das Ritzel dreht und die Brennweite einstellt.
Code
Der Anschluss eines Ultraschallsensors wird
hier beschrieben. Die Servosteuerung erfolgt über Hardware-PWM. Die Einstellungen habe ich
hier vorgenommen .
Der Code erwies sich als sehr bescheiden, aber dies ist nur der Anfang und der Perfektion sind keine Grenzen gesetzt.
Um die Entsprechung des Drehwinkels des Servos zur Brennweite zu bestimmen, führte ich mehrere Kalibrierungsmessungen durch. Als Ergebnis erhielt ich eine lineare Abhängigkeit vom interessierenden Bereich (40-70 cm), der Rest wurde als Fokus auf unendlich genommen.
Fazit
Meiner Meinung nach können selbst die billigsten SG-90-Server viel, eine 1,2 kg / cm-Rute für ein solches Baby, und selbst bei einer solchen Geschwindigkeit - das ist cool, besonders für einen Preis von 1,5 Dollar. Gleiches gilt für den Ultraschall-Entfernungsmesser.
P.S. Der Server kann separat vom Sensor gesteuert werden, z. B. schnelle Übergänge von einem Objekt zum anderen mit unterschiedlichen Brennweiten. Um das System zu verbessern, können Sie auch einen Filter hinzufügen, der die Mängel bei der Messung des Ultraschallsensors ausgleicht.