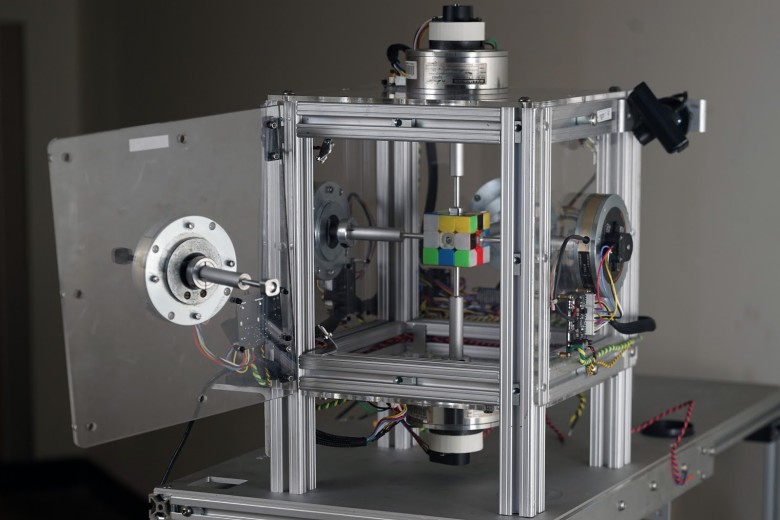
 Rekordroboter, entwickelt am Biomimetic Robotics Laboratory des Massachusetts Institute of Technology
Rekordroboter, entwickelt am Biomimetic Robotics Laboratory des Massachusetts Institute of TechnologyEs gibt Spiele, in denen KI eine Person besiegt. Es gibt jedoch Aufgaben, bei denen eine Person im Allgemeinen nicht als Konkurrent angesehen wird. Hier konkurrieren Roboter nur miteinander. Das Zusammenbauen eines Zauberwürfels ist eine typische solche Aufgabe.
Im November 2016 stellte der Roboter der Infineon Technologies AG einen neuen Weltrekord für die Montage des Zauberwürfels auf: Er
baute ihn in 0,637 Sekunden zusammen und brach damit den bisherigen Rekord von 0,89 s. Europäische Ingenieure wurden jedoch von Studenten des Biomimetic Robotics Lab
des Massachusetts Institute of Technology übertroffen. Ihr Roboter erledigte die Aufgabe in
unglaublichen 0,38 Sekunden . Dies ist eine "schmutzige" Zeit, die das Drücken der Taste "Start", die Bilderkennung und die Berechnung der Abfolge von Aktionen umfasst. Der mechanische Teil der Aufgabe selbst dauerte ungefähr 335 Millisekunden. Lösen eines Problems in einem
Programm basierend auf
min2phase und Senden von Anweisungen - 45 Millisekunden.
Echtzeitvideos wurden eindeutig nicht für menschliche Augen aufgenommen. Damit die unvollkommenen Sinnesorgane einer Person den Montageprozess reparieren können und das langsame menschliche Gehirn erkennt, was passiert, muss die Videowiedergabe mindestens einige zehn Mal verlangsamt werden. Bei einer Geschwindigkeit von 0,03x vom Real wird etwas klar.
Die Entwickler sind sich sicher, dass die Maschine durchaus schneller zurechtkommt, dies erfordert jedoch eine sorgfältige Optimierung des Timings der mechanischen Bewegungen, die mit einer Hochgeschwindigkeitskamera erfasst werden. In dem Video mit 0,03-facher Geschwindigkeit (33-fache Verlangsamung) fällt auf, dass sich die Flächen der Würfelträgheit nach jeder Bewegung vor dem endgültigen Anhalten hin und her bewegen. Eine 90 ° -Drehung in der Realität dauert also in etwa 10 Millisekunden, aber der Roboter macht die nächste Bewegung in 15 Millisekunden. In diesem Teil kann der Prozess erheblich optimiert werden. Aber der Roboter hat den vorherigen Weltrekord fast zweimal verdoppelt, und aufgrund von Optimierungsfehlern ist ein Würfel gebrochen oder Feldeffekttransistoren explodiert. Also haben wir beschlossen, es so zu lassen, wie es ist. Bei Bedarf können die Schüler jedoch weitere 100 Millisekunden aus dem Datensatz „herausschneiden“.
Das Design verwendete die folgenden Details:
- 6 Motoren der Kollmorgen ServoDisc U9-Serie (vier N9M4T mit Neodym-Magneten und zwei UD9-E - sie haben die gleichen Eigenschaften und die gleiche Leistung). Zwei davon stammen aus einem alten Projekt eines mechanisierten Arms , der Rest wurde günstig bei eBay gekauft. An jedem Motor ist ein optischer Sensor US Digital 2000, ebenfalls bei eBay, angebracht. Obwohl diese Sensoren eine übermäßige Auflösung für dieses Experiment bieten, konnten sie für 14 USD pro Stück gekauft werden - neu, was nur ein großartiger Preis ist. Um die Sensoren an den Motoren anzubringen, musste ich ein bisschen basteln.

- 6 kundenspezifische 12-Volt-Motortreiber. Hier arbeiten die Steuerungen STM32F303K8. Die Karten sind auf 100-Volt-Transistoren montiert. Aber aus irgendeinem Grund explodierte einer von ihnen bei 60 Volt zweimal, als der Würfel klebte. Firmware für Controller .

Die Synchronisation / Koordination der Bewegungen zwischen den sechs Steuerungen wird von einer einfachen Logikplatine (UND-Platine) durchgeführt, die von jedem Motor ein Signal über den Beginn / das Ende der Bewegung empfängt und ein Signal über einen sicheren Start an den nächsten Motor in der Warteschlange sendet.

- 2 PlayStation Eye- Kameras nehmen jeweils drei Gesichter auf. Video wird unter Linux mit 187 FPS mit einer im Vergleich zu herkömmlichen Webcams sehr geringen Latenz verarbeitet. Diese Kameras konnten für 7 US-Dollar gekauft werden. Es stimmte, es gab ein Problem mit einem deutlichen Unterschied zwischen den roten und orangefarbenen Quadraten, also betrogen die Schüler ein wenig - und malten die orangefarbenen Quadrate mit schwarzer Farbe.
- 1 Zauberwürfel. Einer der billigsten .
Es war nicht umsonst, dass die Würfel billig genommen wurden, da während des Experiments mehrere Teile brachen (siehe Video). Ingenieure schreiben, dass einer der Tricks, damit alles gut funktioniert, darin besteht, alle Details des Würfels wirklich eng zu komprimieren. Wenn sich die Teile voneinander entfernen, können sich die äußeren Teile nach außen drehen, wenn Sie versuchen, die Mittelebenen schnell zu drehen.
Das Zusammenbauen eines gut zerlegten Würfels erfordert normalerweise 19 bis 23 Schritte. Einige Lösungen summieren sich schneller als andere (die schnellste besteht aus 21 Schritten). Wenn Sie Glück haben, wird die Aufgabe etwa 30 Millisekunden schneller gelöst.