Hallo Community! Der Artikel ist ein klassisches „Fahrrad“, aber für Anfänger in Elektronik und Robotik kann es interessant sein.
Wie Sie wissen, wird die kleinste und einfachste Robotik jetzt auf Mikrocontrollern wie Atmega oder STM montiert. Hier im Artikel nehme ich grundsätzlich nicht das Niveau von Mini-Computern wie Raspberry.
In der Robotik ist es manchmal zusätzlich zu Bewegungen erforderlich, zumindest eine Bewertung des umgebenden Raums vorzunehmen. Also - ich bin nicht auf einen optischen Rastersensor für einfache MKs gestoßen. Der beliebte "Liniensensor" ist das nicht. Eine Suche nach Giktims und ähnlichen Ressourcen lieferte Links zu Kameras, die jedoch für einfache MKs und einen Artikel über die Verwendung von 8 Stk. Zu schnell sind. LEDs als Fotodioden.
Daher entstand die Idee, einen primitiven Rastersensor - Protoglaze - in Analogie zu den ersten lebenden Organismen herzustellen. Alles, was unten geschrieben wurde, wurde nur zu meiner eigenen Unterhaltung gemacht, mit minimalen Kosten und praktischer Anwendung wurde nicht angenommen. Lassen Sie das Fahrrad noch einmal, aber in Bezug auf
Nipkov und die Väter des mechanischen Fernsehens.Details unter dem Schnitt ...
Ein BPW85C-Fototransistor war verfügbar. Es ist logisch, dass ein Radarscanner mit fokussierendem Licht auf den Fotosensor daraus hergestellt werden kann.
Variante 1
Zum Fokussieren können Sie einen rotierenden Parabolspiegel und einen stationären Fototransistor verwenden, um den Fokus zu platzieren. Ich hatte keinen Spiegel, aber es gab ein flaches Blech. Nach 3 Stunden Arbeit mit meinen Händen wurde ein Spiegel von 10 Kopeken und eine fast parabolische Form erhalten.
Parabolspiegel. Es ist schwierig, einen Spiegel zu nehmen))Nach dem Zusammenbau der Drehinstallation wurde festgestellt, dass das Licht nicht nur vom Spiegel, sondern auch von allen Seiten eintritt. Der Sensor kann nicht vom Bildschirm abgedeckt werden, da der größte Teil der Ansicht ebenfalls geschlossen wird. Ich musste mich weigern.
Option 2
Verwenden Sie zum Fokussieren ein Sammellinse und sammeln Sie ein Analogon der Kamera.
Es wurden keine Linsen mit dem erforderlichen Durchmesser (12 mm) gefunden, ich musste meine Hände verwenden, um sie aus einer CD zu machen (es gibt Kunststoff mit guten optischen Eigenschaften).
Ja, das ist eine harte Kindheit, Holzspielzeug. Es stellte sich heraus, dass die Fokussierung akzeptabel ist und der Brennpunkt sogar kleiner als der Kristall des Fototransistors ist.
Ansicht des ObjektivsRotationsmontage - auf einem Miniatur-15-mm-Schrittmotor. Riemenreduziergetriebe aus der gleichen Serie - „aus dem Nichts“. Der Drehwinkel nach links und rechts beträgt ca. 45 °.
GesamtansichtÜber den A4988-Treiber steuert der Amtega328P MK den Schrittmotor. Der Halbschrittmodus wird verwendet, und für jeden Halbschritt wird das Signal vom ADC MK gelesen. Vor dem ADC befindet sich am Transistor auch ein Verstärker, da das Fototransistorsignal schwach ist. Die empfangenen Daten ohne Verarbeitung werden sofort über RS-232 an einen Computer übertragen. Auf dem Computer wird bereits ein Beleuchtungsdiagramm erstellt.
GesamtansichtGesamt: während eines horizontalen Scans. Die Auflösung von 320 Zeilen beim Lesen, die tatsächliche Auflösung ist schwer zu messen, beim Test mit einer Punktlichtquelle stellte sich heraus, dass 6/320, dh etwa 53 Zeilen pro Raster.
Dies ist jedoch das erste Modell, das zweite (für 2D) wird im nächsten Artikel beschrieben.Tests:
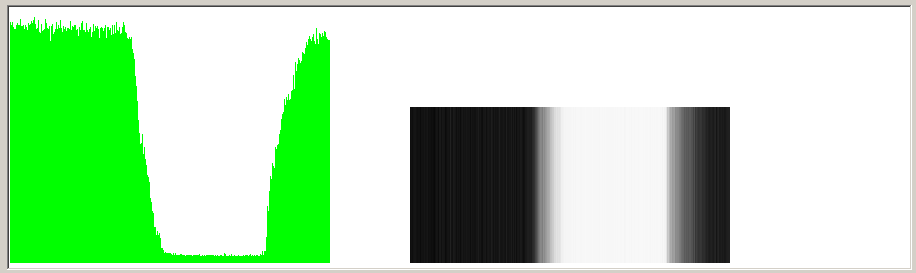 Test auf unterschiedliche Beleuchtung. Das grüne Diagramm zeigt den Spannungspegel am ADC, das Schwarzweißbild ist das Ergebnis der Signalumwandlung, die der MK „sieht“.
Test auf unterschiedliche Beleuchtung. Das grüne Diagramm zeigt den Spannungspegel am ADC, das Schwarzweißbild ist das Ergebnis der Signalumwandlung, die der MK „sieht“.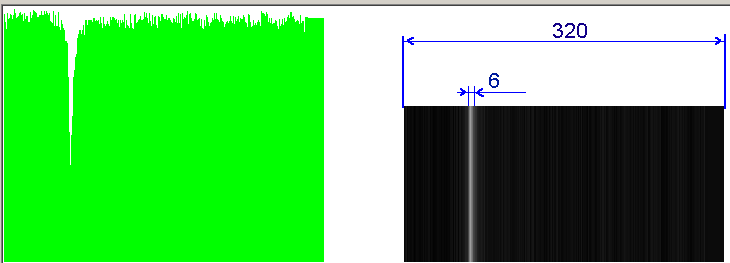 Einzelpunkttest. Die tatsächliche Auflösung beträgt ca. 53 Zeilen
Einzelpunkttest. Die tatsächliche Auflösung beträgt ca. 53 Zeilen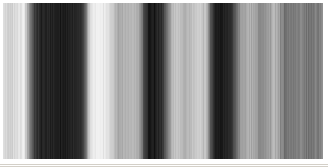
 "Schießen" von Drei-Finger-Batterien auf hellem Hintergrund
"Schießen" von Drei-Finger-Batterien auf hellem HintergrundDie "Video" -Geschwindigkeit beträgt 4 Bilder (Zyklen) pro Sekunde und wird durch die Fähigkeiten der SD bestimmt. Für eine hypothetische Anwendung (?) In einem einfachen Roboter - genug.
Die Hauptsache ist, dass Videoaufnahmen nur wenig Ressourcen des Mikrocontrollers beanspruchen. Es gibt immer noch Möglichkeiten für andere Aktionen und bei Bedarf sogar für die Bilderkennung.
Es gab auch einen Versuch, AGC (automatische Belichtung) durchzuführen, aber die Verstärkung war zu nicht linear. Am Operationsverstärker kann in den nächsten Ausführungen gearbeitet werden.
Quellen:
Archiv mit Quelle für CodeVisionAVR und Empfänger auf VBasic 6
Alexander