BigDog war der erste Boston Dynamics-Roboter, der weithin bekannt wurde. In vielerlei Hinsicht war er es, der den Namen seines Firmengründers „machte“. Ein vom Militär verlassener Roboter für das Militär und der erste Boston Dynamics-Roboter, den Entwickler in die Kamera traten.
Jetzt hat das Projekt ein Ende gesetzt, aber es ist die Grundlage für spätere Entwicklungen des Unternehmens geworden - Cheetah und New Spot, Videos, mit denen Videos schnell viral wurden.
Heute werden wir versuchen, das BigDog-Gerät anhand der Worte seiner Entwickler zu verstehen. Die Autoren haben den Originalartikel bereits 2008 veröffentlicht, aber er wurde immer noch nicht ins Russische übersetzt. Es informiert über die Hauptkomponenten des Roboters und die Algorithmen, die seinen Gang koordinieren. Das Ziel des BigDog-Projekts ist die Schaffung eigenständiger Geräte mit Beinen, die sich über unwegsames Gelände bewegen können. Sie müssen vorhandenen Rad- und Kettenfahrzeugen überlegen sein. Ein ideales System sollte überall dort eingesetzt werden, wo eine Person oder ein Tier stundenlang laufen und Gewicht in Form von Kraftstoff und Nutzlast tragen kann. Sie ist klug genug, um mit minimalem menschlichem Eingreifen und Kontrolle das Gelände zu überqueren.
Die von BigDog-Robotern entwickelten Schritte haben dazu beigetragen, diese Ziele zu erreichen, obwohl noch viel Arbeit vor uns liegt.
BigDog verfügt über integrierte Systeme, die Strom, Strom, Erfassung, Überwachung und Kommunikation von Umweltdaten bereitstellen. Die Stromversorgung erfolgt über einen wassergekühlten Zweitakt-ICE, der ca. 15 PS leistet. Es treibt eine Pumpe an, die Hydrauliköl über ein System von Filtern, Verteilern und Batterien zu den Aktuatoren der Roboterbeine fördert. Aktuatoren sind reibungsarme Hydraulikzylinder, die von zweistufigen Servoventilen gesteuert werden. Jeder Aktuator verfügt über Sensoren, die die Position und Stärke der Gelenke überwachen. Jedes Bein hat 4 hydraulische Aktuatoren, die die Gelenke versorgen. Ein am BigDog-Gehäuse montierter Wärmetauscher kühlt das Öl und ein Kühler kühlt den Motor für einen stabilen Betrieb.
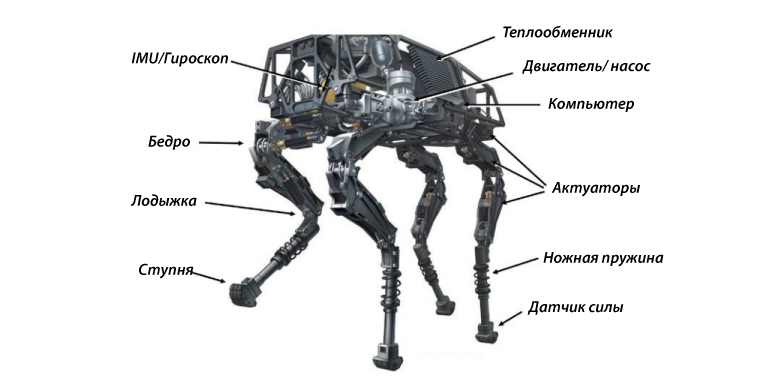 Wichtige Designelemente von BigDog
Wichtige Designelemente von BigDogDer Bordcomputer steuert das Verhalten von BigDog, steuert die Sensoren und ist für die Kommunikation mit dem Fernbediener verantwortlich. Es zeichnet auch eine große Menge an technischen Daten für die Leistungsanalyse, Fehleranalyse und Betriebsunterstützung auf.
BigDog verfügt über ca. 50 Sensoren. Trägheitssensoren messen die Position und Beschleunigung des Körpers, Gelenksensoren messen die Bewegung und Stärke von Gelenkaktuatoren. Der Bordcomputer verarbeitet Informationen von all diesen Sensoren, um eine Schätzung der Bewegung des Roboters zu erhalten. Eine andere Gruppe von Sensoren steuert die BigDog-Homöostase: Hydraulikdruck, Durchfluss und Temperatur, Motordrehzahl usw.
Der Bordcomputer führt sowohl Überwachungsfunktionen auf niedriger als auch auf hoher Ebene aus. Ein Low-Level-System steuert die Position der Servos und die Ernährung in den Gelenken. High-Level koordiniert die Position der Beine, um die Geschwindigkeit, Position und Höhe des Körpers während der Bewegung zu regulieren. Es verfolgt auch die Kraft der Interaktion mit dem Boden, um eine gleichmäßige Bewegung sicherzustellen.
BigDog bietet viele Bewegungsoptionen. Er kann aufstehen, sich ducken, mit kriechendem Gang gehen, gehen, jeweils nur einen Fuß heben, traben und galoppieren. Die Geschwindigkeit bei kriechendem Gang beträgt 0,2 m / s für einen Luchs - 1,6 m / s, für Laufen - 2 m / s (unter Laborbedingungen betrug die Höchstgeschwindigkeitsanzeige 3,1 m / s). Zusätzlich kann der Roboter 1,1 Meter springen.
BigDog wird normalerweise von einem menschlichen Bediener gesteuert, der mit einer Steuereinheit arbeitet, die über IP-Funkgeräte mit dem Roboter verbunden ist. Der Bediener bietet eine umfassende Kontrolle über Bewegung und Geschwindigkeit. Er kann dem Roboter auch befehlen, den Motor zu starten oder zu stoppen, aufzustehen, sich zu setzen, zu gehen oder zu rennen.
[Wie der autonome Navigationsalgorithmus für den Roboter entwickelt wurde, lesen Sie hier ]Ein Stereo-Vision-System und ein Lidar wurden in den Roboter integriert. Das vom Jet Propulsion Laboratory entwickelte Stereo-Vision-System besteht aus zwei Stereokameras, einem Computer und einer visuellen Software. Es wird verwendet, um eine 3D-Form der Landschaft vor dem Roboter zu erhalten und seinen Weg zu finden. Lidar wird benötigt, damit BigDog einer Person ohne zusätzliche Bedienerbefehle folgen kann.
Gangkontrolle
Um sich mit menschlicher Geschwindigkeit zu bewegen, verwendet BigDog einen dynamisch ausgeglichenen Trabgang. Der Ausgleich erfolgt über Quergeschwindigkeit und Beschleunigung, die durch das wahrgenommene Verhalten der Beine in Kombination mit Trägheitssensoren bestimmt werden.
Das BigDog-Steuerungssystem koordiniert die Kinematik und Bodenreaktionen des Roboters und reagiert auf grundlegende Haltungsbefehle. Die Steuerung verteilt die Last auf die Beine, um deren Tragfähigkeit zu optimieren. Die vertikale Belastung der Gliedmaßen wird so gleichmäßig wie möglich gehalten, und einzelne Beine erzeugen bodengestützte Reaktionen, die auf die Hüften gerichtet sind, um die Reibung zu verringern.
Der Gangkoordinationsalgorithmus, der für die Kommunikation zwischen den Gliedmaßen verantwortlich ist, löst die Bewegung der Beine aus. Es wird von einem virtuellen Beinmodell koordiniert. Das allgemeine BigDog-Gehsteuerungsschema kann wie folgt dargestellt werden:
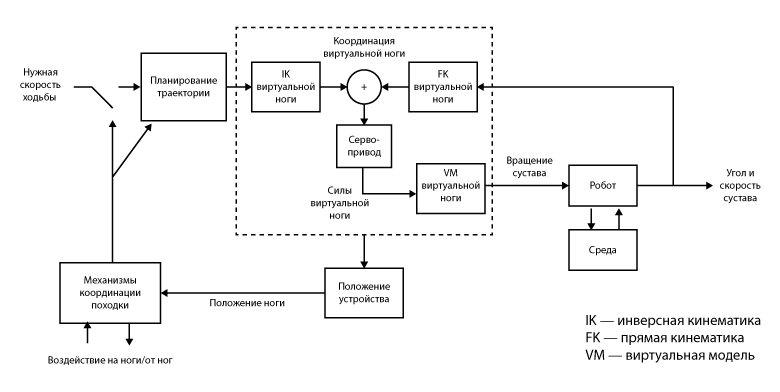 BigDog Walking Control-Muster
BigDog Walking Control-MusterWir haben Laufalgorithmen für unwegsames Gelände entwickelt und diese in physischen Modellen getestet, bevor wir sie an einem Roboter getestet haben. Ein simulierter Roboter läuft in einem Winkel von bis zu 60 Grad an Hängen entlang. Der Algorithmus seiner Bewegung hängt davon ab, ob er sich auf einer ebenen Fläche oder an einem Hang befindet. Darüber hinaus werden unerwartete Hindernisse wie Steine oder Gruben berücksichtigt.
Die physikalische Modellierung wurde verwendet, um Gangalgorithmen zu entwickeln.Das Steuersystem verwendet Informationen vom Gelenksensor, um zu bestimmen, ob sich die „Beine“ derzeit am Boden befinden, und um die Belastung für jedes Glied und jeden Antrieb zu bestimmen. Der Zustandsalgorithmus steuert die Position des Körpers und koordiniert die Kinematik der Gliedmaßen mit den Reaktionskräften der mit dem Boden in Kontakt stehenden Beine. Der Zustandsalgorithmus implementiert die korrekte Bewegung der Beine auf einer unebenen Oberfläche. Auf diese Weise können Sie die Kurven, Schritte und Höhen des Körpers relativ zum Boden steuern und BigDog so an Landschaftsveränderungen anpassen, ohne dass Sensoren eine höhere Wahrnehmung des Geländes benötigen.
BigDog passt sich auf zwei Arten dem Gelände an. Es reguliert die Größe und Haltung des Körpers zur Landschaft und steuert, wo Sie Ihre Füße platzieren müssen. Beim Auf- und Absteigen von Hängen neigt sich der Körper des Roboters. Die steilen Hänge (mehr als 45 Grad), die der Roboter überwindet, indem er den Gang korrigiert und kleinere Schritte verwendet.
Am Ende des Artikels danken die Autoren allen 23 Mitarbeitern des BigDog-Teams und teilen ihre Pläne für die Zukunft mit: Den Roboterkörper stärken, BigDog autonom machen und leiser machen (Benzinmotor macht Geräusche wie ein Motorrad). Der letzte Punkt ist, wie die Zeit gezeigt hat, ein ernstes Problem geblieben.Mehr zur Robotik unter robo-hunter.com: