Robotikkreise sind heutzutage definitiv ein Erfolg. Lego, Arduino, Kratzer und vieles mehr stehen modernen Kindern zur Verfügung (ich bin sicher, dass viele, wie ich, in dieser Hinsicht eifersüchtig auf das aktuelle Kind sind). Als Lehrer für Robotik habe ich beschlossen, Material zu teilen, das ich in ein paar Jahren Arbeit gesammelt habe, nämlich einen ziemlich einfachen Roboter und mehrere Aktivitäten damit.
Ich benutze diese Einheiten im Klassenzimmer, um Kindern die Funktionsprinzipien des Motortreibers, des Liniensensors und des Entfernungsmessers zu erklären. Kinder, die von der Untersuchung dieses Roboters überholt werden, haben in der Regel bereits seit einem Jahr verlernt und haben nur minimale Vorstellungen von Arduino, Motoren und Elektrotechnik im Allgemeinen. Es gibt viele Projekte im Internet mit diesen Komponenten, aber zwei Dinge haben mich motiviert, meine Maschine zu entwickeln - ich wollte ein Fach für 4 AA-Batterien verwenden und fast jeden Sensor sicher am Roboter befestigen können (dafür gibt es mehrere zusätzliche Befestigungslöcher im Design).

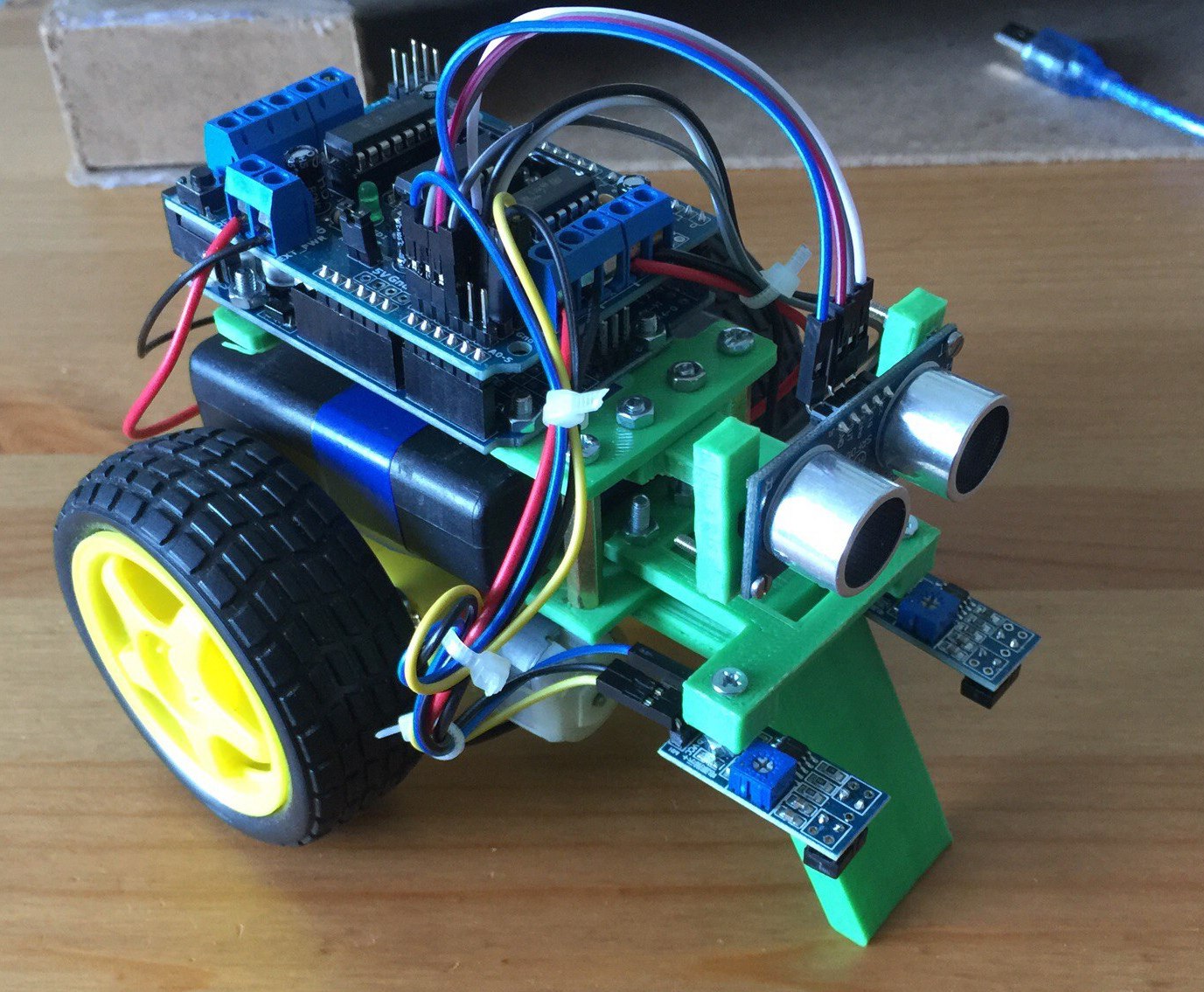
Der Roboter wird von einer Arduino Uno-Karte mit Motorabschirmung l293d gesteuert. Von den Sensoren habe ich den HC-SR04-Entfernungsmesser und zwei tcrt5000-Leitungssensoren installiert (er hat sowohl digitalen als auch analogen Ausgang).
Der Roboterkörper besteht aus 3 Teilen (ohne die optionalen Halterungen für Sensoren), die auf einem 3D-Drucker gedruckt werden. Für die Montage benötigen Sie M3-Befestigungselemente. Ich habe alle erforderlichen Elemente in einem Dokument beschrieben, das Dateien für einen 3D-Drucker enthält.
Der Roboter wird sowohl in der Standard-Arduino-IDE-Umgebung (ältere Kinder) als auch im miniBloq-Programm (für jüngere Gruppen) programmiert. Für die Standardumgebung wird die AFMotor-Bibliothek verwendet, die für die Arbeit mit dem Schild der Motortreiber erforderlich ist. In miniBloq müssen Sie zum Arbeiten die Roboterausrüstung „ta-bot v1“ mit demselben Treiber im Abschnitt auswählen.
Mit einem Entfernungsmesser und Liniensensoren an Bord eignet sich der Roboter für die Teilnahme an Wettbewerben in vielen Disziplinen. Er wurde jedoch nur für das Training entwickelt und funktioniert nicht, um Preise zu gewinnen.
Klassen, die mit ihm abgehalten werden können:
- Arbeiten Sie mit dem Lokführer. Raddrehung in verschiedene Richtungen und mit unterschiedlichen Geschwindigkeiten.
- Einfache Manöver. Fahren im Kreis, Fahren in einer Acht (in diesen Klassen müssen Sie in der Regel viele Male die erforderliche Zeit und Geschwindigkeit auswählen, um eine bestimmte Zahl zu erhalten).
- Leitungssensor. Arbeitsprinzip. Übertragung von Sensorwerten an einen Computer (Port Monitor).
- Fahren in einer Linie mit einem Liniensensor.
- Eine Linie mit zwei Liniensensoren fahren.
- Entfernungsmesser. Das Prinzip des Entfernungsmessers. Übertragung des Entfernungsmessers auf den Computer.
- Mit einem Entfernungsmesser durch den Raum fahren. Der Roboter fährt vorwärts, um auf ein Hindernis zu stoßen. Sobald er an die Wand fährt, dreht er sich um.
- Suche nach dem Feind (wie in Robosumo). Zwei Roboter werden in einem Kreis platziert und beginnen sich zu drehen, wobei sie mit einem Entfernungsmesser nach dem Feind suchen.
In dem Ordner mit den Details finden Sie auch mehrere fertige Klassen aus der obigen Liste.