
Ich mache Sie auf eine Lampe aufmerksam, die gleichzeitig eine visuelle Hilfe "ein Schwarzes Loch im zweidimensionalen Raum" ist.
Einsteins allgemeine Relativitätstheorie besagt, dass Objekte mit Masse das Gefüge der Raumzeit verzerren. Schwarze Löcher sind Punkte von solch enormer Dichte, dass die Raumzeit in ihnen so verzerrt ist, dass weder Strahlung noch Materie entweichen können.
Um dieses Phänomen nachzubilden, nahm ich ein Stück schwarzes Elasthan, um das „Gewebe der Raum-Zeit“ nachzuahmen, und platzierte darum einen „Ereignishorizont“ - einen Ring aus weißen LEDs; nur ein bisschen näher am "Schwarzen Loch" - und das Licht kommt nicht heraus. Je länger Sie die Lampe eingeschaltet lassen, desto mehr wächst das Schwarze Loch und absorbiert Materie und Energie. Um dies zu simulieren, zieht das Elasthan in unserem Modell eine geflochtene Schnur, die durch ein Kupferrohr geführt und von einem Elektromotor an der Basis in Bewegung gesetzt wird. Der Helligkeitsregler beeinflusst gleichzeitig die Spannungsgeschwindigkeit: Je mehr Licht und Materie pro Zeiteinheit in das Schwarze Loch eindringen, desto schneller wächst es und umgekehrt. Wenn die Lampe ausgeschaltet ist, dreht sich der Motor in die entgegengesetzte Richtung, wodurch die Spannung verringert wird, die analog zur Verdunstung eines Schwarzen Lochs aufgrund von Hawking-Strahlung ist.
Ist eine solche künstlerische Darstellung eines Schwarzen Lochs in der kinetischen Skulptur mit primitiver Mechanik nützlich? Wahrscheinlich ja, im gleichen Maße wie der Comic "Tim and Beat" über die kleinen Männer im Computer. Oder Modellierung physikalischer Phänomene mit Schaltkreisen an Operationsverstärkern. Wenn Sie eine ernstere, wenn auch vereinfachte Geschichte über Schwarze Löcher wünschen, finden Sie hier
dieses Video auf dem YouTube-Kanal "Kurz gesagt".
Wenn Sie dieselbe Lampe zusammenbauen möchten, bereiten Sie Folgendes vor:
- schwarzer Stretchstoff wie Elasthan (auch bekannt als Spandex, Lycra usw.)
- ein halbes Zoll Kupferrohr (ein Kunststoffrohr ist auch geeignet, wenn Sie kein Steampunker sind) und drei 90-Grad-Eckbeschläge
- Holzsockel
- geflochtene Angelschnur
- Sprühdose mit schwarzer Farbe
- Arduino Nano
- 9-Volt-Stromversorgung
- hausgemachter weißer LED-Streifen, der sich vom Standard dadurch unterscheidet, dass alle darin enthaltenen LEDs einfach parallel geschaltet sind
- Modul mit zwei H-Brücken mit Durchstromschutz L9110
- 28BYJ Schrittmotor
- Kippschalter
- variabler Widerstand
- Drähte, Lot, Flussmittel, Steckbrett
- Werkzeuge für die Funkinstallation und Holzbearbeitung
Sägen Sie drei Rohrstücke ab: zwei von 330 mm und eines von 368 mm.
Auf Wunsch können Sie wie folgt polieren:

Bohren Sie drei 16-mm-Löcher: zwei in einem Winkel von etwa 25 Grad zur Vertikalen - für die Rohre, an denen Sie dann den LED-Ring befestigen, und dann 25 mm von ihnen entfernt - das zentrale Loch für das Rohr, durch das die Angelschnur geführt wird.
Bohren Sie zwei weitere Löcher mit den entsprechenden Durchmessern für den Kippschalter und den variablen Widerstand. Ein weiteres Loch auf dem Foto des fertigen Geräts am Ende des Artikels wurde fälschlicherweise gebohrt. Sie müssen es nicht wiederholen.
Drucken Sie
zwei Sätze Halbringe mit einem schwarzen Filament und kleben Sie sie jeweils an. Um den gesamten Ring zu drucken, hatte der Autor nicht genügend Platz auf dem Druckertisch.
Schneiden Sie ein Quadrat aus Elasthan und legen Sie es auf einen dünnen Ring. Machen Sie Löcher für 10 Schrauben in den Stoff, halten Sie ihn dann leicht gedehnt, bedecken Sie ihn mit einem dicken Ring und verbinden Sie das resultierende „Sandwich“ mit Schrauben. Das übrig gebliebene Elasthan abschneiden.
Binden Sie eine Perle mit einer geflochtenen Angelschnur in die Mitte des Elasthanstücks.

Kleben Sie den LED-Streifen um den Umfang des Rings. Befestigen Sie den Ring durch Armaturen an den kurzen Rohren. Löten Sie die Drähte auf das Klebeband, markieren Sie sie so, dass die Polarität klar ist, oder nehmen Sie farbige Drähte und führen Sie sie durch eines der Rohre.
Malen Sie die Basis schwarz. Setzen Sie die Armatur auf das lange Rohr. Installieren Sie alle Rohre, den Kippschalter und den variablen Widerstand in den dafür vorgesehenen Löchern. Führen Sie die Leitung durch das in der Mitte installierte Mittelrohr.
Schließen Sie die Komponenten gemäß dem beigefügten Diagramm an.
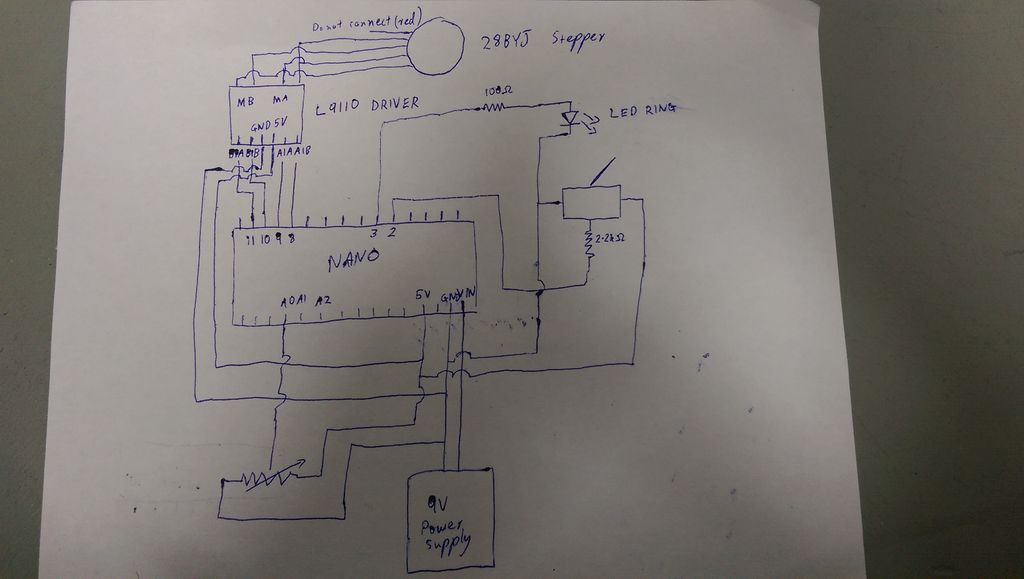
Der 28BYJ-Schrittmotor hat fünf Drähte, von denen einer - rot - nirgendwo angeschlossen werden muss. Verbinden Sie die orangefarbenen und rosa Kabel mit dem Ausgang des Motor B H-Brückenmoduls und die gelben und blauen Kabel mit dem Motor A-Ausgang. Stecken Sie das Modul wie folgt in das Arduino:
B1A bis D11
B1B bis D10
A1A bis D9
A1B bis D8
Verbinden Sie den LED-Streifen (ich erinnere Sie daran, er ist hausgemacht und alle LEDs werden einfach parallel geschaltet) über einen 100-Ohm-Widerstand zwischen dem D3-Ausgang (oder einem anderen Ausgang mit PWM, den Sie in der Skizze auswählen können) und dem gemeinsamen Kabel. Schließen Sie den Kippschalter so an, dass ein gemeinsames Kabel über den 2,2-kOhm-Widerstand mit dem Eingang D2 in der unteren Position und dem Ausgang des Fünf-Volt-Stabilisators in der oberen Position verbunden wird. Es ist interessant, warum der Autor Pull-up-Widerstände nicht so sehr mag, dies würde die Verwendung von Schaltern ohne normalerweise geschlossene Kontakte ermöglichen. Verbinden Sie einen der seitlichen Anschlüsse des variablen Widerstands mit dem gemeinsamen Kabel, den anderen mit dem Ausgang des Fünf-Volt-Stabilisators und den mittleren Anschluss mit dem Eingang A0.
Drucken Sie eine Riemenscheibe aus demselben Satz STL-Dateien, legen Sie sie auf die Motorwelle und befestigen Sie die Angelschnur. Es stellte sich also so etwas wie das auf dem Bild gezeigte heraus.
Füllen Sie die Skizze:
//L9110 -> 28BYJ int A1A = 8; int A2A = 9; int B1B = 10; int B2B = 11; int PotPin = 0; // A0 int SwitchPin = 2; int LEDring = 3; // - int waitTime; // ( ) int PotVal; // int SwitchVal; int intensity; // float pulleyRadius = 1.4; // float maxStringContraction = 7.0; // , , float stepsPerRevolution = 2048.0; // float Pi = 3.14159; float circumference = 2.0 * Pi * pulleyRadius; float MaxRevs = maxStringContraction / circumference; // float MaxSteps = MaxRevs * stepsPerRevolution; // int StepLimit = MaxSteps; // int StepCount = 0; void setup() { Serial.begin(9600); //Serial.println(circumference); //Serial.println(MaxRevs); //Serial.println(MaxSteps); //Serial.println(StepLimit); pinMode(SwitchPin, INPUT); pinMode(LEDring, OUTPUT); pinMode(A1A, OUTPUT); pinMode(A2A, OUTPUT); pinMode(B1B, OUTPUT); pinMode(B2B, OUTPUT); } void step1() { digitalWrite(A1A, LOW); digitalWrite(A2A, HIGH); digitalWrite(B1B, HIGH); digitalWrite(B2B, LOW); delay(5); } void step2() { digitalWrite(A1A, LOW); digitalWrite(A2A, HIGH); digitalWrite(B1B, LOW); digitalWrite(B2B, HIGH); delay(5); } void step3() { digitalWrite(A1A, HIGH); digitalWrite(A2A, LOW); digitalWrite(B1B, LOW); digitalWrite(B2B, HIGH); delay(5); } void step4() { digitalWrite(A1A, HIGH); digitalWrite(A2A, LOW); digitalWrite(B1B, HIGH); digitalWrite(B2B, LOW); delay(5); } void Stop() { digitalWrite(A1A, LOW); digitalWrite(A2A, LOW); digitalWrite(B1B, LOW); digitalWrite(B2B, LOW); delay(5); } void BHgrowth() { analogWrite(LEDring, intensity); if (StepCount < StepLimit) { // step1(); step2(); step3(); step4(); StepCount += 1; } Stop(); } void HawkingRadiation() { analogWrite(LEDring, 0); if (StepCount > 0) { step3(); step2(); step1(); step4(); StepCount -= 1; } Stop(); } void loop() { PotVal = analogRead(PotVal); intensity = map(PotVal, 0, 1024, 0, 254); SwitchVal = digitalRead(SwitchPin); if (SwitchVal == 1) { BHgrowth(); waitTime = 255 - intensity; // , , if (waitTime < 1){ waitTime = 1; } } else { HawkingRadiation(); waitTime = 255; } delay(waitTime); Serial.println(waitTime); Serial.println(SwitchVal); }
Fertig, du kannst es benutzen!