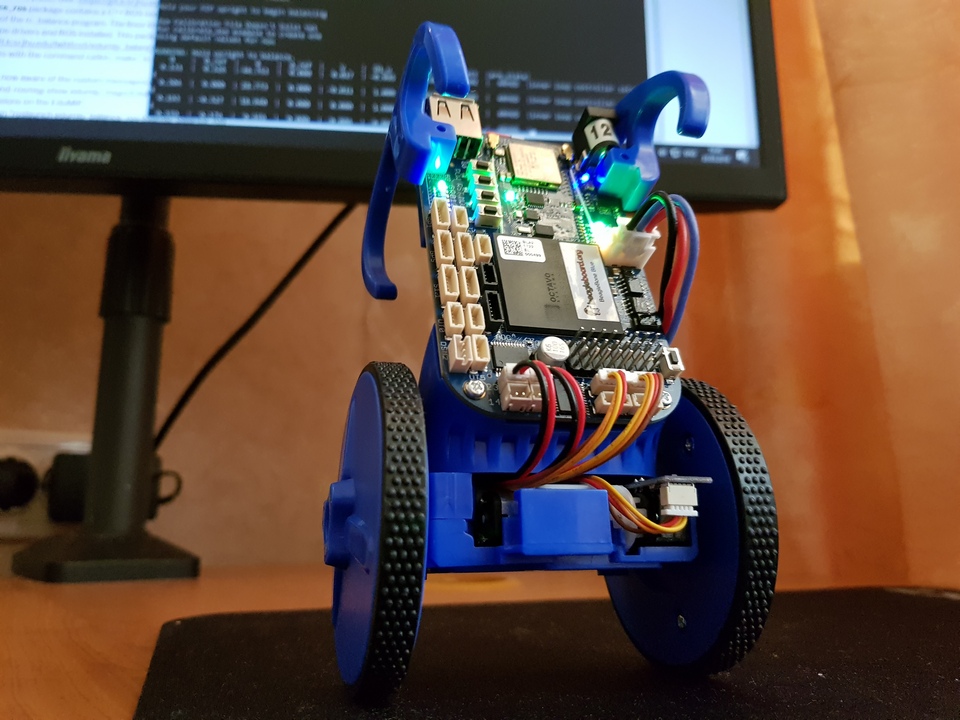
Der Roboter kann auf zwei Rädern das Gleichgewicht halten und ziemlich schnell fahren. An Bord von Linux gibt es WLAN. Sie können über die Weboberfläche programmieren. Es gibt Anweisungen und Quellen zum Ausführen von ROS. Generell viele Möglichkeiten für Kreativität.
Ich wollte schon lange mit einem Roboter mit Gyroskop, Beschleunigungsmesser, Kompass und ja spielen, um ROS zu lernen. Ich wollte nichts wie zuvor löten und basteln. BeagleBone verfügt also über einen kostenpflichtigen PC mit einer integrierten Erweiterungskarte für BeagleBone Blue-Roboter, die über die erforderlichen Sensoren und Motortreiber verfügt. Nach einiger Zeit wurde das Kit für die Montage des EduMip-Roboters in den USA für ihn fertiggestellt und sie schrieben Anweisungen zum Starten von ROS mit den Quellen darauf. Im Allgemeinen habe ich Feuer gefangen.
Was ist im Kit enthalten:
- Radstand mit Motoren / Zahnrädern / Rädern / Encodern / Drähten
- 2-Zellen 1400 mAh LiPo
- 12 Volt Ladegerät
- Beagle knochenblau
EduMIP wurde im UC SAN DIEGO COORDINATED ROBOTICS LAB Robotics Laboratory erstellt. Wird in Online-Kursen, Universitäten und Robotikkreisen verwendet.
EduMIP ist eine Lernplattform:
- Dynamische Modellierung und Rückkopplungskontrolle instabiler Systeme.
- Roboterbewegungsplanung und Kollisionsvermeidung.
- Gleichstrommotorsteuerung über H-Brücken und Encoder.
- Orientierungsbewertung über IMU und Barometer.
- Kommunikation über WLAN (802.11 b / g / n) und Bluetooth (4.1 / BLE).
- Laden, Ausgleichen, Schützen und Überwachen des (mitgelieferten) LiPo 2-Zellenakkus.
- Multithreaded, ereignisorientierte C-Programmierung unter Debian Linux.
EduMIP ist kompatibel mit Python, ROS, MATLAB & Simulink und LabVIEW.
Das EduMip-Chassis wurde in Zusammenarbeit mit WowWee entwickelt.
EduMIP lässt sich mit 3D-Druck einfach erweitern. Es gibt eine umfangreiche Softwarebibliothek für Millionen von Standardsensoren und Kommunikationsgeräten über: USB, I2C, SPI, CAN, UART (GPS, DSM2), PWM (Servos, ESCs), GPIO, ADC.
Trotzdem musste ich einen anderen Lötkolben kaufen, um die Drähte an die Motoren zu löten, für dieses Geld konnten wir sofort löten. Der Rest des Kits ist von ziemlich hoher Qualität und gut verpackt.
An einem Abend gesammelt. Motoren und Räder sind meiner Meinung nach matschig. Ich bin froh, dass es nicht notwendig war, die gesamte Elektronik auf einer Platine praktisch zu löten. Der Akku wird über die Platine aufgeladen. Aus dem Skript geht die Batteriespannung hervor.
Ein zweifelsohne ein Plus für mich ist, dass BedgleBone über integriertes WLAN und volles Linux verfügt. Die Cloud9-IDE ist sofort verfügbar und Sie können den Roboter in Python und anderen Programmiersprachen drahtlos programmieren. Das Board verfügt über 4 Gigabyte Speicher, auf dem bereits Linux Debian geschrieben ist, sodass Sie ohne Flash-Laufwerk starten und programmieren können. Nur für ROS müssen Sie das Bild auf eine Speicherkarte schreiben.
Im nächsten Teil werde ich analysieren, wie man es programmiert, während ich mich mit der Installation zusätzlicher Bibliotheken von diesem Roboter in Debian beschäftige.