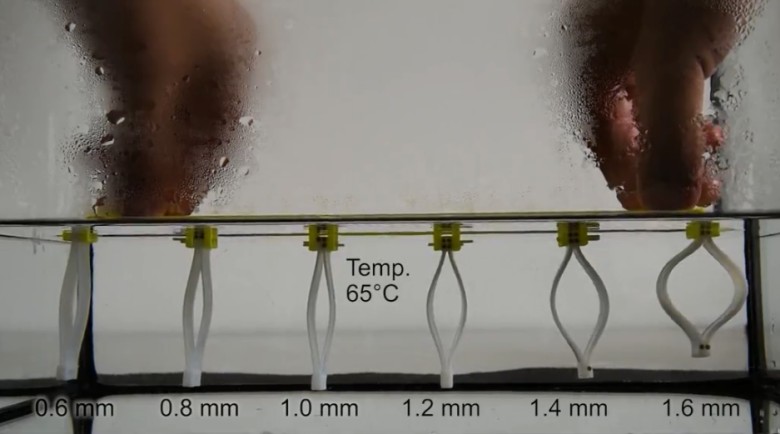
 Die Reaktion flexibler Polymerstreifen auf Temperaturänderungen hängt von ihrer Dicke ab. Hier sind Streifen von 0,6 mm bis 1,6 mm gezeigt, wenn sie bei 65 ° C in Wasser gelegt werden. Die Richtgeschwindigkeit variiert zwischen 7 und 37 Sekunden, sodass Sie die Aktionen des Roboters in einer bestimmten Reihenfolge programmieren können
Die Reaktion flexibler Polymerstreifen auf Temperaturänderungen hängt von ihrer Dicke ab. Hier sind Streifen von 0,6 mm bis 1,6 mm gezeigt, wenn sie bei 65 ° C in Wasser gelegt werden. Die Richtgeschwindigkeit variiert zwischen 7 und 37 Sekunden, sodass Sie die Aktionen des Roboters in einer bestimmten Reihenfolge programmieren könnenIngenieure des California Institute of Technology und Kollegen der Swiss Higher Technical School in Zürich
haben Roboter entwickelt , die sich unabhängig voneinander bewegen können, ohne Motoren, Servos oder Stromquellen zu verwenden. Klingt nach einer Perpetual Motion Maschine? Nicht wirklich. Tatsache ist, dass jedes Ruder- oder „Muskelpaar“ nur
eine Ruderbewegung ausführen kann, nachdem der Roboter ins Wasser gesenkt wurde. Das Highlight ist jedoch, dass die Muskeln und Ruder so viele sein können, wie Sie möchten - und sie können in unterschiedlichen Zeitintervallen nacheinander arbeiten. Auf diese Weise können Sie die Flugbahn des Roboters vorprogrammieren und verschiedene Aktionen ausführen, z. B. das Abladen einer Ladung, gefolgt von einem Ausweichmanöver. Die Forschung wurde vom Army Research Office finanziert.
Trotz der scheinbaren Einfachheit sind dies die ersten Geräte dieser Art, die Materialverformungen für temperaturprogrammierte Aktionen in Wasser verwenden. Das Funktionsprinzip wird in den
Demonstrationsvideos gezeigt.
Liste der Video-Demos
- Ein Schlag . Die von einem Hub zurückgelegte Strecke entspricht ungefähr 1,15 der Länge des Roboters.
- Die Reaktion der "Muskeln" auf eine Temperaturänderung hängt von der Dicke der Banden des flexiblen Polymers ab. Das Video zeigt Streifen mit einer Dicke von 0,6 mm bis 1,6 mm, wenn sie bei 65 ° C in Wasser gelegt werden. Die Richtgeschwindigkeit variiert zwischen 7 und 37 Sekunden.
- Bewegung eines Ruderroboters mit zwei Ruderpaaren . Die Abfolge der Schläge wird durch die Dicke der Muskeln im ersten und zweiten Ruderpaar reguliert. Die vom Doppelhub zurückgelegte Strecke beträgt ungefähr das 1,9-fache der Länge des Roboters.
- Bewegung mit einer Linkskurve . Das erste Ruderpaar bewegt den Roboter um etwa 0,5 seines Körpers vorwärts, und das Ruder aus der zweiten Stufe dreht den Körper um etwa 21,45 °.
- Bewegung mit zwei Umdrehungen . Nach dem ersten Hub dreht sich der Roboter um 21,64 ° nach links und nach dem zweiten Hub um 21,45 ° nach rechts.
- Muskeln aus einem anderen Material , die sich bei einer anderen Temperatur von 40 ° C ausdehnen. Das Video zeigt, dass das vorherige Material nicht auf diese Temperatur reagiert. So können Wissenschaftler den Roboter je nach Umgebungstemperatur für verschiedene Bewegungen programmieren.
- Ein Beispiel für einen komplexen Algorithmus . Der Roboter schwimmt die eingestellte Distanz, lässt die Last fallen und schwebt dann in die entgegengesetzte Richtung davon. Die erste Bedingung sind dünnere Polymerstreifen, die früher feuern. Die Ladung wird durch dicke Streifen gesichert, die später reagieren und die Last freigeben, nachdem der Roboter die programmierte Strecke zurückgelegt hat.
- Der interne Mechanismus des Aktuators zeigt, wie der Muskel den bistabilen Mechanismus drückt und von einem Gleichgewichtszustand in einen anderen überträgt.
Laut den Entwicklern löscht diese Studie in gewissem Sinne „die Grenze zwischen Materialien und Robotern“, da das Material selbst als Maschine im Gerät fungiert: „Unsere Beispiele zeigen, dass wir strukturierte Materialien verwenden können, die als Reaktion auf Umweltsignale deformiert werden, z Kontrolle und Bewegung von Robotern,
sagt Chiara Daraio, Professorin für Maschinenbau und angewandte Physik am California Institute of Technology für Ingenieurwissenschaften und angewandte Wissenschaften, eine der Autoren eines wissenschaftlichen Artikels.
Der Roboter wird von Streifen aus flexiblem Polymer angetrieben, die bei Kälte schrumpfen und sich beim Erhitzen dehnen. Das Polymer ist so positioniert, dass ein bistabiler Schalter im Körper des Roboters aktiviert wird, der wiederum an einem beweglichen Element, beispielsweise an einem Paddel, angebracht ist, um vorwärts zu streicheln.
Die Studie basiert auf
früheren wissenschaftlichen Arbeiten zu den Ketten bistabiler Elemente zur Signalübertragung und zum Entwurf von Logikgattern einer programmierbaren Maschine.
Zusätzlich zur Temperatur kann der Roboter so programmiert werden, dass er abhängig von anderen Bedingungen Aktionen ausführt - beispielsweise um auf Änderungen des Säuregehalts des Mediums zu reagieren.
Der wissenschaftliche Artikel wurde am 15. Mai 2018 in der Zeitschrift
Proceedings der National Academy of Sciences der Vereinigten Staaten von Amerika veröffentlicht (doi: 10.1073 / pnas.1800386115,
pdf ).