Zuerst schrieb ich eine lange Einführung, woher eine solche Aufgabe kam, und dann kam es mir langweilig vor und ich löschte sie.
Die Aufgabe ist also die Schaffung eines autonomen UAV zur Überwachung des Status von Stromleitungen (Stromleitungen).
Als:
- Dies ist ein Hobbyprojekt und ich kann einen großen Fehler in meinen Berechnungen machen
- Flugobjekte stellen eine Gefahr für Lebewesen und deren Eigentum dar,
Dann sollte dieser Artikel nur als Erweiterung des Horizonts und nicht als Leitfaden für Maßnahmen verstanden werden.
Liste der Fehler zur Erkennung auf Stromleitungen.
UAV-Anforderungen
- Vertikaler Start und Landung (ohne Katapulte und Fallschirme), d. H. Ein Hubschrauber
- Kann starten, an bestimmten Punkten fliegen, zurückkehren und automatisch landen
- Sie können eine Flugmission bearbeiten, einen Befehl zum Starten und Landen von überall auf der Welt erteilen
- Broadcast-Telemetrie und Echtzeit-Video über das Internet
- Hochladen von Fotos und Videos von der Bordkamera auf den Server während oder nach dem Flug
- Laden Sie den Akku ohne menschliches Eingreifen auf oder ersetzen Sie ihn mechanisch.
Und auch zwei widersprüchliche Anforderungen:
- Zuverlässige Elektronik (wenn sie irgendwohin fällt, gilt sie als verloren)
- Die relativ geringen Kosten des Experiments (wenn es irgendwohin fällt, betrachten Sie es als verloren)
Der Grad der Autonomie ist im Idealfall fantastisch: Die Drohne fliegt auf einer vorgeplanten Route, lädt ein Foto auf den Server hoch, die Software auf dem Server erkennt Fehler auf dem Foto und sendet eine Anfrage an das Reparaturteam mit den Koordinaten der Arbeitsstätten. Die Drohne selbst sollte vor dem Ende der Lebensdauer eines Teils, z. B. einer Batterie oder von Lagern, nicht die Aufmerksamkeit einer Person erfordern.
Es ist klar, dass diese Aufgabe nicht für ein Jahr ist, aber ich werde beginnen, und vielleicht wird jemand abholen und fortfahren.
Zum Beispiel fertige industrielle Versionen autonomer Komplexe:
eins ,
zwei ,
drei ,
vier ,
fünf ,
sechs ,
sieben ,
acht ,
neun ,
zehn ,
elf ,
zwölf ,
dreizehn ,
vierzehn . Ich schrieb Anfragen an alle als potenziellen Käufer, um die Preise herauszufinden. Von ihnen zum Verkauf bereit: 2; bereit zum Verkauf in Russland: 0.
Flugsteuerung auswählen
Da ich Video und Telemetrie über das Internet senden muss, fällt mir sofort ein, einen Mikrocomputer mit einem 4G-Modem und einer Kamera auf die Drohne zu setzen und aus diesem Kit einen Webcast zu erstellen. Solche Lösungen wurden gefunden:
eins ,
zwei ,
drei . Dies sind normale Einzelkarten mit einem externen USB 4G-Modem und einer Kamera. Zum Codieren und Senden von Videos wird
gstreamer verwendet. Diese Dinge selbst wissen jedoch nicht, wie sie die Drohne steuern sollen. Sie müssen in Verbindung mit dem Flugregler verwendet werden.
Der Flugregler ist das Gehirn der Drohne. Es überwacht den Status von Positionssensoren (Gyroskop, Beschleunigungsmesser, Kompass), GPS-Koordinaten, die Position der Griffe auf dem Bedienfeld und steuert basierend auf diesen Daten die Motoren so, dass sie an einem Punkt hängen oder irgendwo fliegen. Der Flugregler muss irgendwie mit dem Bordcomputer verbunden sein, damit Sie die Flugaufgabe laden oder einen beliebigen Punkt angeben können, an dem geflogen werden soll und wann die Kamera eingeschaltet werden soll.
Im Angebot finden Sie viele verschiedene Controller, die sich in Preis und Funktionalität stark voneinander unterscheiden. Einige von ihnen arbeiten mit ihrer eigenen Software, andere verwenden Open-Source-Software wie
Ardupilot und dessen Gabel
PX4 .
Mit Ardupilot habe ich auf
8-Bit-Atmegs gespielt , die keinen USB-Bootloader hatten, aber auf dem Programmierer zusammengefügt waren. Seitdem bin ich ihm nicht mehr begegnet und war angenehm überrascht, als ich herausfand, dass er jetzt auf 64-Bit-Linux-Computern arbeiten kann. Er hat eine riesige Community von Benutzern, sowohl Hobbys als auch Profis, eine lange Liste von Sensoren, die sofort unterstützt und gemalt werden
Pläne für 2018-2019 . Während dieser Zeit gelang es ihm, sich zu einem
DroneCode- Projekt zu entwickeln und sich dann von diesem zu
trennen .
Auf den ersten Blick wurden lediglich alle erforderlichen Funktionen implementiert: automatisches Starten und Landen, Laden von Flugaufgaben, Desktop- und mobile Anwendungen für alle Hauptbetriebssystemfamilien. Die Steuerprogramme (GCS - Ground Control Station) kommunizieren mit der
Bordsteuerung über Kurznachrichten über das offene
MAVLink-Protokoll über eine Reihe von Funkmodems (die Drohne sendet Telemetrie, das GCS sendet Steuerbefehle). Ich vermute, dass diese Nachrichten über das Internet gestartet werden können.
Schauen Sie sich die
Liste der unterstützten Controller an und holen Sie sich etwas. Dort gibt es ein Dutzend Optionen, von klein bis groß und mit unterschiedlichen Eigenschaften.
Von all den verschiedenen Controllern mochte ich mehrere Optionen:
| Fluglotse | Erle PXFMini | Emlid Rand | Navio 2 | Erle Brain 3 | PixHawk 2 Cube |
| Zusätzlicher Computer | Himbeer Pi Zero W. | Nein | Himbeer pi 3 | Nein | Himbeer pi 3 |
| | | | | |
| Gewicht einstellen, g | 84 | 97 | 98 | 145 | 150 |
| CPUs insgesamt | 1 | 2 | 2 | 1 | 3 |
| Betriebssystem läuft gleichzeitig | 1 | 1 | 1 | 1 | 2 |
| IMU-Sensoren, Kits | 1 | 2 | 2 | 1 | 3 |
| Luftdrucksensor | 1 | 2 | 1 | 1 | 1 |
| Stromredundanz | Nein | 2x | 3x | Nein | 2x |
| GPS, Glonass | externes Modul
mit zusätzlichem Magnetometer | externes Modul
mit zusätzlichem Magnetometer | eingebauter Empfänger, externe Antenne | externes Modul
mit zusätzlichem Magnetometer | externes Modul |
| Videoeingang | CSI auf Himbeere | HDMI | CSI auf Himbeere | CSI | CSI auf Himbeere |
| Wifi | ist da | ist da
Long Range 2km
+52 g | ist da | ist da | ist da |
| | | | | |
| Die Kosten für das Kit betragen $ | 212 | 700 | 215 | 341 | 331 |
Das leichteste Kit (84 g) wird vom
Raspberry Pi Zero W- Mikrocomputer (9 g), dem
Erle PXFMini- Controller (15 g), dem nativen externen GNSS-Modul (46 g) und einem zusätzlichen
USB-Hub (14 g) bezogen.

Es gibt nur einen funktionierenden Prozessor in diesem Kit - auf dem Raspberry Pi. Daran hängt die PWM-Steuerung der Motorregler, das Lesen der Sensorwerte, das Linux-Betriebssystem mit allem Mut und das Dekodieren des Videos von der Kamera. Da der Pi Zero keine USB-Anschlüsse hat, müssen Sie bei dieser Option einen externen Hub verwenden. IMU-Sensoren und Stromeingang ohne Redundanz.
Der nächste Satz (97 g) eines Hongkonger Unternehmens mit russischen Namen im Entwicklungsteam ist der
Emlid Edge- Controller (59 g) mit einem GNSS-Modul (38 g). Das GNSS-Modul arbeitet nach dem
UAVCAN- Protokoll und ist zusätzlich mit einem Magnetometer und einem Luftdrucksensor ausgestattet. Hier ist ein separater ARM Cortex-M3-Prozessor für PWM verantwortlich. Das Linux-Betriebssystem dreht sich auf dem Haupt-Quad-Core ARM Cortex-A53.

Der Controller verfügt über einen HDMI-Videoeingang, über den Sie jede Kamera mit einem solchen Ausgang, z. B. GoPro 4 oder 5, direkt anschließen können. Die relativ hohen Kosten werden durch die im Kit enthaltenen WLAN-Transceiver mit großer Reichweite erklärt (bis zu 2 km bei HD-Videoübertragung). Das Gewicht des Bordmoduls (52 g) ist in der allgemeinen Tabelle nicht enthalten, da ich 4G-Kommunikation benötige. Sie können jedoch diese Option berücksichtigen: Über ein WLAN mit großer Reichweite können Sie einen Backup-Kommunikationskanal über einen stationären Router mit kabelgebundenem Internet erstellen.
Die nächste Option (98 g) besteht aus dem berühmten
Raspberry Pi 3- Mikrocomputer (45 g) mit einem
Navio 2- Shield-Controller (23 g) von demselben Emlid und einer externen GNSS-Antenne (30 g). Die Steuerung verfügt über einen separaten Cortex-M3-Prozessor zur Steuerung der PWM auf 14 Kanälen und zur Entschlüsselung eingehender SBUS- und PPM-Signale vom Empfänger. Es wird wiederum über den Treiber im Linux-Kernel gesteuert, der auf Raspberry ausgeführt wird.

Der Regler ist mit einem Paar beabstandeter IMU - Sensors (Beschleunigungsmesser, Gyroskop, Magnetometer) MPU9250 und LSM9DS1, ein Luftdrucksensor ausgestattet ist , und GNSS-Modul
U-blox NEO-M8N , der die GPS, GLONASS und Beidou mit einer externen Antenne durch MCX Stecker sieht.
Sie können diesen „Kuchen“ von drei Seiten gleichzeitig mit 5 Volt versorgen, die als unabhängige Quellen fungieren, die sich gegenseitig duplizieren: den Hauptstromanschluss an der Abschirmung, PWM-Servoausgänge, Micro-USB an Raspberry.
Der
Erle Brain 3- Controller (100 g) mit einem externen GPS-Modul (45 g) nach Gewicht, Preis und einer Reihe von Sensoren sieht in der Tabelle so aus, dass ich hier nicht einmal ein Foto einfügen werde.
Als nächstes haben wir das zuverlässigste und schwerste Kit (150 g), das aus dem beliebten
PixHawk 2 Cube-Flugregler (80 g) mit offener Architektur und einem Raspberry Pi 3-Computer besteht. Anstelle von Raspberry können Sie in diesem Fall jedes leichte Einzelboard verwenden, z. B.
Odroid XU4 ,
NVIDIA Jetson oder andere mit den richtigen Schnittstellen und dem richtigen Gewicht.

In PixHawk selbst sind zwei Prozessoren installiert: der erste 32-Bit-STM32F427 Cortex M4 - der Hauptprozessor, auf dem das
NuttX- Echtzeitbetriebssystem (RTOS) ausgeführt wird, und der zweite ausfallsichere 32-Bit-STM32F103. Die Steuerung besteht aus Modulen: IMU-Prozessoren und -Sensoren werden im Cube installiert (auf einer Schwingungsdämpferhalterung und sogar mit Heizung), und die Stromversorgung und die Anschlüsse für die gesamte Peripherie werden zur Basis gebracht. Es wird davon ausgegangen, dass die Grundlagen unterschiedlich sein können und jeder seine eigenen entwickeln kann, um bestimmte Anforderungen zu erfüllen, auf die Sie dann den fertigen Würfel legen können. Übrigens gibt es eine fertige Version mit einem Anschluss für die Installation des
Intel Edison- Mikrocomputers. Da Intel diese Computer nicht mehr veröffentlicht, wird Raspberry auch als Bordcomputer in diesem Kit enthalten sein.
Raspberry wird als zusätzlicher Computer verwendet, um eine Verbindung zum Internet herzustellen, und Sie können alle ressourcenintensiven Aufgaben darauf ausführen (z. B. Mustererkennung in OpenCV), ohne befürchten zu müssen, dass Fehler in diesem Prozess kritische Funktionen wie die Motorsteuerung „abwägen“.
Angesichts des Gewichts, der technischen Daten und des Preises ist der erste Platz für mich das Navio 2 + Raspberry-Kit und der zweite Pixhawk 2 Cube + Raspberry (+52 g). Wenn es unter Pixhawk eine Basis im Anschluss für den kleinen Raspberry Zero und sogar einen USB-Ausgang gäbe, wäre dies interessanter. Sie können zwar noch keinen kaufen, aber es ist noch nicht interessant, ihn zu erstellen.
Ich werde in Notizen schreiben, dass eine erhöhte Zuverlässigkeit zusätzliche 52 Gramm und 110 Dollar kostet. Nach dem Gesamtergebnis der Berechnungen können diese Zahlen unbedeutend sein.
Autonomes Laden
Wie Sie in den fertigen Versionen oben sehen können, gibt es verschiedene Ansätze, um eine autonome Drohne für den nächsten Flug vorzubereiten: Laden der Batterie über Kontaktflächen, berührungsloses Induktionsladen und mechanisierter Batteriewechsel mit anschließendem Laden an der Station.
Jede Methode hat ihre Vor- und Nachteile, ich werde sie separat beschreiben, aber auf jeden Fall muss die Drohne für ihre Funktion in der Lage sein, mit fast Zentimeter Genauigkeit am gewünschten Punkt zu landen.
Landung "auf den Punkt"
Für eine genaue Landung können Sie die Standard-Bordcomputerkamera, visuelle Markierungen und OpenCV verwenden, um sie zu erkennen. Hier ist
eine Lösung, die Sie googeln können.
Ein weiteres neues erschien, als ich diesen Artikel schrieb. Die Mustererkennung ist für Raspberry jedoch ein ziemlich zeitaufwändiger Vorgang, und Sie möchten sie nicht ohne besondere Notwendigkeit herunterladen. Die Qualität der Erkennung hängt auch stark vom Material, aus dem der Marker besteht, und den Lichtverhältnissen ab. Es ist wünschenswert, dass dies ein separater Sensor ist und dem gewünschten visuellen Punkt vorgefertigte Koordinaten gibt, unabhängig von der Anwesenheit und dem Einfallswinkel des Lichts. Und dies steht in der Liste der unterstützten Ardupilot-Geräte, die als
IR-Lock bezeichnet werden .
 Airobotics
Airobotics oben aufgeführten auch diese Lösung verwendet. Es basiert auf dem Open Source-
Kameramodul Pixy CMUcam5 . Dieses Modul ist mit einer Kamera und einem Prozessor ausgestattet. Es kann „gelehrt“ werden, bestimmte Bilder von Objekten zu erkennen und dann am Ausgang vorgefertigte Koordinaten dieser Objekte im Bild abzurufen.
Der Flugregler kennt die Koordinaten des erkannten Bildes auf dem Bild und die Entfernung dazu und berechnet, wie weit und in welche Richtung die Drohne bewegt werden muss.
Die Modifikation von IR-Lock besteht darin, dass eine
IR-Taschenlampe von LEDs als zu erkennender Marker verwendet wird und bei der Kamera herkömmliche Objektive durch solche ersetzt werden, die nur IR-Licht durchlassen. Infolgedessen sieht die Kamera bei jedem Licht die Lumineszenz der Lampe in Weiß auf schwarzem Hintergrund (und nicht mehr), was die Erkennungsgenauigkeit erheblich erhöht.
Für den normalen Betrieb dieses Sensors wird außerdem ein
Entfernungsmesser benötigt, der die Höhe über dem Boden misst. Die Entwickler empfehlen die Verwendung eines Laser-Entfernungsmessers, beispielsweise
LightWare LW20 (20 Gramm und 299 US-Dollar, bis zu 100 m) oder eines billigen und kurzen
VL53L0X (weniger als 1 Gramm und 10 US-Dollar, bis zu 2 m), der in den neuesten Versionen von Ardupilot unterstützt wird. Aus irgendeinem Grund verdient der Ultraschallsensor für Landezwecke nicht das Vertrauen der IR-Lock-Entwickler.
DJI-Drohnen landen übrigens automatisch mit Ultraschall- und Stereokameras.
Bleib wie ein Toter
Damit die Drohne an einem Ort hängt und nicht „schwimmt“, reicht GPS allein nicht aus. Leider können die Koordinaten von GPS-Empfängern aufgrund der Atmosphäre innerhalb von zehn Metern schweben, und
GPS-RTK- Korrektursysteme müssen für die Zentimetergenauigkeit verwendet werden. Dieses System verwendet eine stationäre Station an Land als Standard für Koordinatenabweichungen und Funkkommunikation mit der Karte, um die Werte dieser Abweichungen dorthin zu senden. So etwas ist notwendig, um fotografische Pläne aufzunehmen und sie anschließend in große Karten zu
kleben. Um sie festzuhalten , beschränke ich mich
vorerst auf den optischen Sensor
PX4Flow .
Es funktioniert nach dem gleichen Prinzip wie eine optische Maus. Im Gegensatz zu IR-Lock erkennt es kein bestimmtes Bild und arbeitet in Ardupilot in verschiedenen Flugmodi. Das Kamerabild wird mit einem Versatz von 400 Mal pro Sekunde analysiert, und die berechneten Versatzwerte können von der Steuerung unter Verwendung des I2C-Protokolls gelesen werden. Der Sensor (
Open-Hardware ) wiegt 15 Gramm und verfügt über alles, was Sie auf Ihrem Board benötigen: eine 168-MHz-Cortex-M4F-CPU (128 + 64 KB RAM), einen optischen Sensor 752 × 480 MT9V034 und ein 3-Achsen-Gyroskop L3GD20. Für den normalen Betrieb wird außerdem empfohlen, anstelle eines Ultraschall-Entfernungsmessers einen Laser-Entfernungsmesser zu verwenden. Das Modul selbst bietet zwar einen Anschluss nur für den Ultraschallsensor.
Minimum Electronics Kit
Folgendes wurde gesammelt:
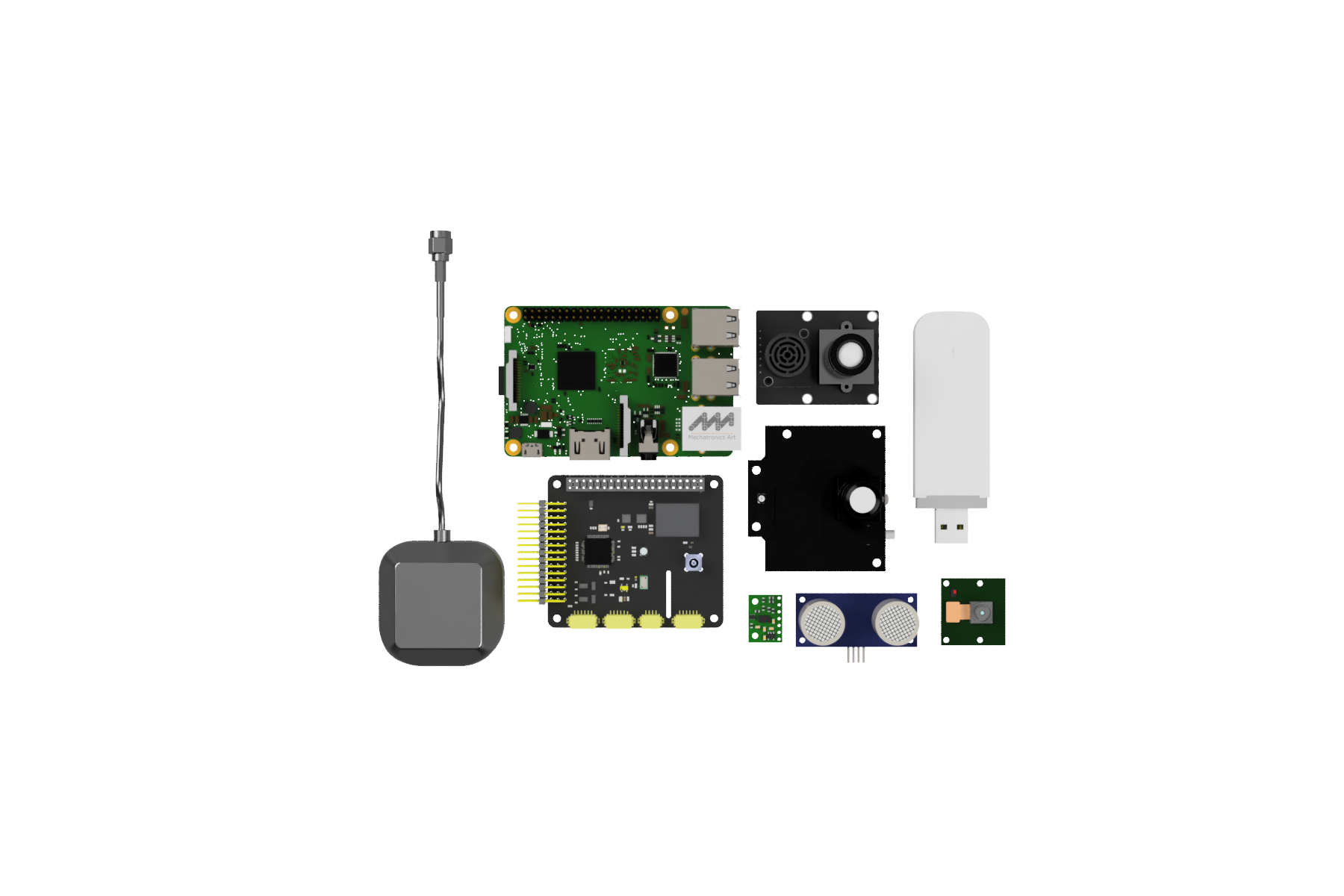
Das Gesamtgewicht beträgt 199 g. Alle Komponenten arbeiten mit 5 Volt und verbrauchen im Video-Broadcast-Modus fast 2 Ampere (10 Watt).
Das Kit enthält einen Ultraschall-Abstandssensor, der auf das Thema Hindernisse blickt. Ich habe Stereovision und kreisförmige Lidars für später gelassen, wenn ein wirklicher Bedarf in ihnen entsteht.
Nutzlast
Da die native Kamera von Raspberry Fotos von durchschnittlicher Qualität aufnimmt und nicht weiß, wie Fotos gleichzeitig mit Videos aufgenommen werden, wird sie nur für Webcasts verwendet. Als Hauptkamera benötigen Sie eine geeignete Kamera, um Fehler an Stromleitungen zu erkennen.
GoPro Hero 5 Session , multispektrale
Parrot Sequoia , Dual
Sentera Double 4K und Infrarot
FLIR Vue Pro eignen sich für die meisten Elemente aus der Liste der erkannten Fehler. Jeder von ihnen wiegt etwa 100 g.
Um die Kamera zu stabilisieren und die Bildqualität zu verbessern, fliegt eine 2- oder 3-Axialfederung in die Last.
 Einfache
Einfache 3-Achs-Aufhängungen wiegen ca. 160 g und werden mit 12 Volt betrieben, haben bei dieser Spannung einen Arbeitsstrom von ca. 50 mA und einen maximalen Strom von 700 mA, wenn die Motoren klemmen.
Ernährung
Für die Stromversorgung der gesamten Elektronik sind Quellen mit 5 Volt (mindestens 2,2 Ampere) und 12 Volt (mindestens 1 Ampere) erforderlich. Angesichts der Notstromversorgung des Flugreglers benötigen Sie zwei unabhängige 5-Volt-Quellen. Sie können ein Stromversorgungssystem aus einzelnen Modulen mit geeignetem Nennwert herstellen oder beispielsweise ein fertiges „3 in 1“ finden (24 g, maximale Eingangsspannung bis 28 Volt, 3A-Ausgänge). Ein
Stromsensor (22 g) wird daran angeschlossen, damit der mAh-Verbrauch der Batterie gemessen werden kann.
Elektronik-Kit + Kamera + Federung + Stromversorgungssystem wiegen 505 g.
Motoren und Propeller
Auf vielen professionellen Drohnen habe ich
T-Motor Motoren und Propeller gesehen. Anscheinend nicht lässig. In der Ardupilot-Dokumentation werden sie auch als Antriebssystem für professionelle Drohnen
empfohlen . Deshalb werden wir nach geeigneten Motoren für sie suchen.
Damit die Drohne lange fliegen kann, sind Motoren mit maximaler Effizienz erforderlich. Der Wirkungsgrad der Motor- und Propellerbündel wird anhand der Schubmenge in Gramm pro 1 Watt verbrauchter Energie gemessen.
Um herauszufinden, welcher Motor am besten geeignet ist, müssen Sie das Gesamtgewicht der fertig montierten Drohne kennen und dabei den Rahmen, die Batterie und die Motoren selbst mit Schrauben berücksichtigen. Der Akku wird benötigt, damit er 30 Minuten hält. Der Rahmen wird benötigt, damit alles darauf passt und die Schrauben nichts berühren.
Zu viele Unbekannte, deshalb verwende ich den Online-
Rechner für Quadcopter E-Calc .
Nachdem in Kalkulator ich ausgewählt Motoren gespielt
Antigravity 4004 KV300 (53 g) mit Schrauben
15H5 (27 g). Im optimalen Modus mit einer Versorgungsspannung von 24 Volt zieht ein solches Kit 474 Gramm bei einem Strom von 1,4 A. Der Wirkungsgrad beträgt 14,11 g / W, das Verhältnis von Traktion zu Eigengewicht = 5,9: 1. Bei voller Geschwindigkeit beträgt der Schub 1311 Gramm bei einem Strom von 7,5 A. Der Copter wird mit vier Motoren, dh einem Quad, ausgestattet sein. Optimales Startgewicht = (474 g * 4 Motoren) = 1896 g, maximal (unter Berücksichtigung des Schubgewichtsverhältnisses von 2: 1) = (1311 g * 4 Motoren) / 2 = 2622 g.
Motoren werden von Drehzahlreglern gesteuert. Die Versorgungsspannung der Motoren = 24 Volt, der maximale Betriebsstrom = 7,5 A, daher benötigen Sie einen Regler für eine solche Spannung und mit einem Arbeitsstrom unter Berücksichtigung des Spielraums von mindestens 10 A. T-Motor hat den leichtesten Regler (7 g ohne Kabel) für diese Spannung - es ist
FPV 35A-32bit 3-6S . Es basiert auf der beliebten
BLHeli-32- Firmware mit geschlossenem Code, aber breiten Einstellungen und einer
großen Anzahl von Analoga .
Zwischensumme:VMG (Propeller-Motor-Gruppe), bestehend aus Motoren, Propellern und Reglern (je 4 Stück), wiegt 346 g.
Zusammen mit der Elektronik und einer Nutzlast (346 + 505) werden 851 g erhalten. Berücksichtigt man die Befestigungselemente, Drähte und Verbinder (schätzen wir +100 g) = 951 g.
Bei optimalem Gewicht bleiben Rahmen und Batterie (1896 - 951) = 945 g. Bei einem Maximum (2622 - 951) = 1671 g.
Rahmen
Wir berechnen die minimale Rahmengröße so, dass sich die ausgewählten 15-Zoll-Propeller nicht gegenseitig stören, um Traktion zu erzeugen. Die Abmessungen der Rahmenhersteller geben den Abstand zwischen den Achsen der diagonal voneinander angeordneten Motoren an.
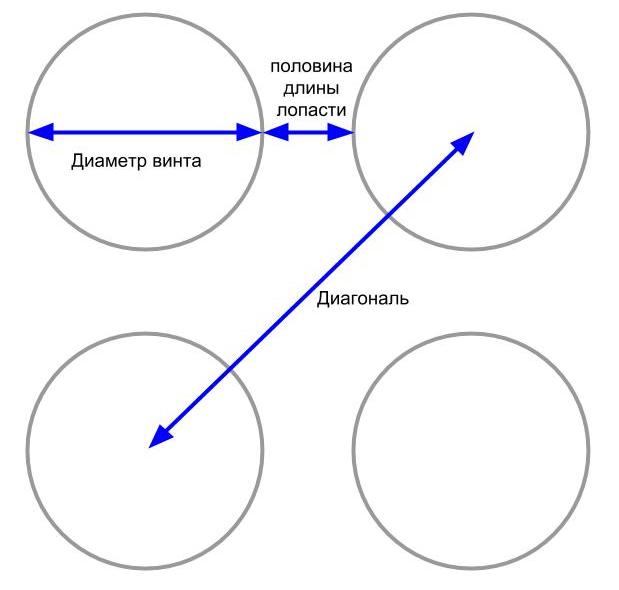
Auf dem Bild sehen Sie die Hypotenuse, die aus dem Bein berechnet wird und der Summe aus dem Durchmesser der Schraube und dem Abstand zwischen den Propellern entspricht. Die benachbarten 15-Zoll-Propellerblätter drehen sich bei einer Rahmendiagonale von 540 mm 1 Millimeter auseinander. Wenn Sie etwas Platz hinzufügen, beträgt die Größe eines geeigneten Rahmens ca. 600-700 mm.
Sie können viele zum Verkauf finden, zum Beispiel einmal : 600 mm und 750 g, zwei : 650 mm und 450 g, drei : 690 und 675 g , vier : 650 mm und 750 g . Alle zeichnen sich durch die Leistung und das Vorhandensein von Faltelementen (Fahrgestell, Träger) aus, um den Transport zu vereinfachen.Ich werde die Auswahl einer bestimmten Instanz für meine Bedürfnisse verschieben, für die weitere Berechnung werde ich das Rahmengewicht von 450 g berücksichtigen.Es verbleibt eine Batterie mit einem Gewicht von 495 g für das optimale Gewicht und 1221 g für das Maximum.Batterie
Um eine Batterie auszuwählen, müssen Sie wissen, wie sie Strom liefern soll.Bei voller Drehzahl „fressen“ die Motoren 30 A (7,5 A * 4 Motoren) und die Elektronik etwa 0,45 A (10 Watt). Aufgrund des geringen Spielraums runden wir den minimalen Batteriestrom von 35A ab. Für Li-Po-Batterien mit hoher Stromabgabe bei 30 ° C beträgt die Mindestkapazität 1,2 Ah (35/30), und für leichtere Li-Po- und Li-Ion-Batterien mit Stromabgabe bei 10 ° C beträgt die Mindestkapazität 3,5 Ah (35/10). .Optional ist die Montage von 6S2P aus dem Li-Ion Sony VTC6 möglichMit einem BMS wiegt es ungefähr 630 g (mit einer Kapazität von 6 Ah). Mit dieser Batterie wiegt die Drohne 2031 g, 135 g mehr als optimal, aber innerhalb des Maximums. Berechnen wir nun, wie lange der Copter unter idealen Bedingungen einfrieren kann. Mit einem Gesamtgewicht von 2031 g hat jeder Motor 508 g. Schauen wir uns die Eigenschaften des Motors an und ermitteln Sie den Stromverbrauch mit dieser Traktion. Es wird ungefähr gleich 1,6 A sein. 4 Motoren und Elektronik ergeben insgesamt 6,85 A (1,6 * 4 + 0,45). Unter Berücksichtigung der Batterieentladung von bis zu 20% ergibt sich (6 Ah * 80% / (6,85 A)) = 0,7 Stunden oder 42 Minuten.Layout
 Während ich den richtigen Rahmen auswählte und darüber nachdachte, wie ich alles darauf platzieren und reparieren sollte, kam ich zu dem Schluss, dass es einfacher sein würde, einige Details zu zeichnen und 3D-Druck aus Kunststoff und Fräsen aus Carbon zu bestellen. Ein Paar fertiger Eisen- und Eisenwarenstücke kann bei Aliexpress bestellt werden.
Während ich den richtigen Rahmen auswählte und darüber nachdachte, wie ich alles darauf platzieren und reparieren sollte, kam ich zu dem Schluss, dass es einfacher sein würde, einige Details zu zeichnen und 3D-Druck aus Kunststoff und Fräsen aus Carbon zu bestellen. Ein Paar fertiger Eisen- und Eisenwarenstücke kann bei Aliexpress bestellt werden.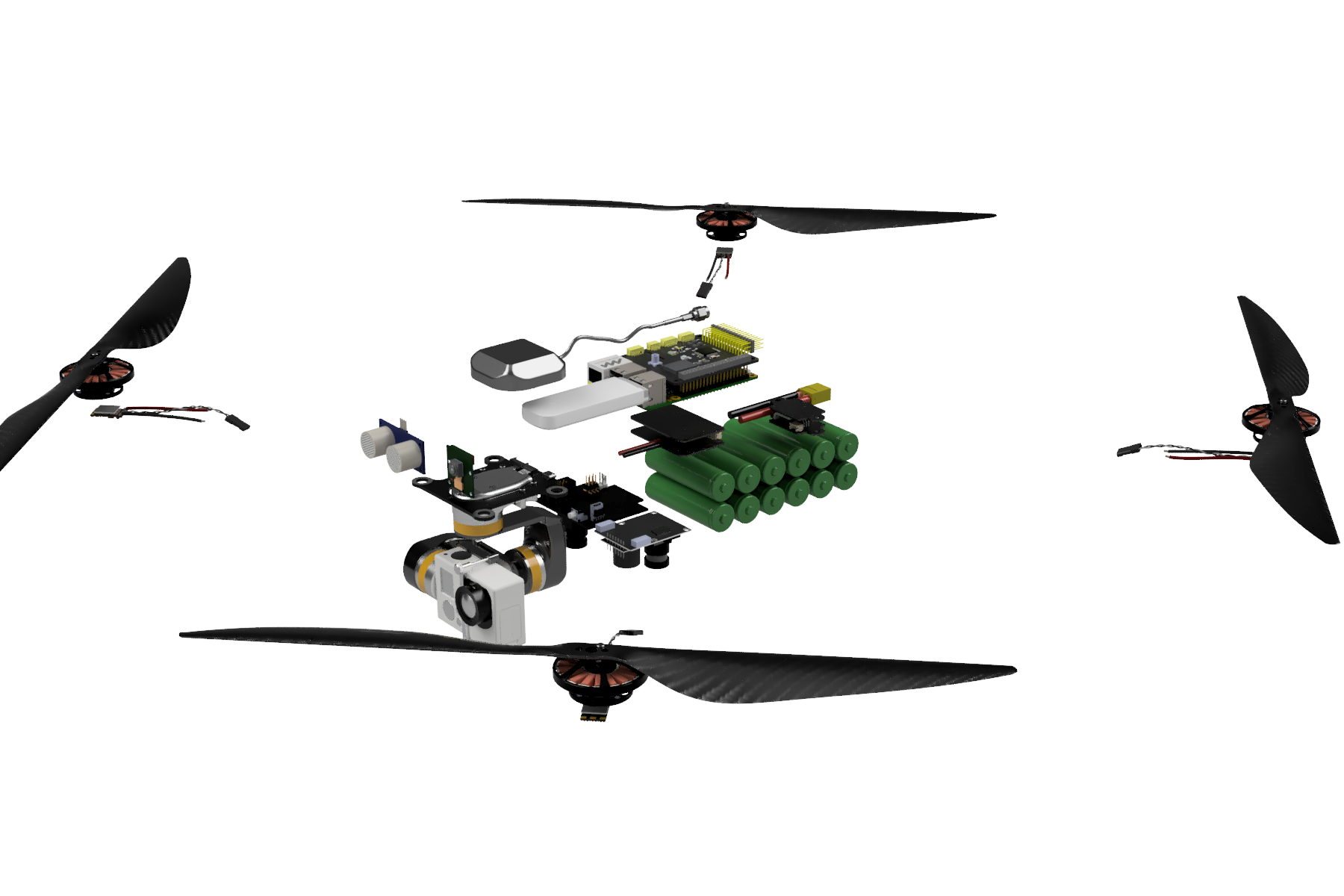 Nachdem wir ein wenig mit dem Layout und dem Schwerpunkt experimentiert haben, haben wir einen solchen Rahmen erhalten:
Nachdem wir ein wenig mit dem Layout und dem Schwerpunkt experimentiert haben, haben wir einen solchen Rahmen erhalten: Er besteht aus Carbonrohren und -platten, Teilen aus Aluminium und Verbindungselementen aus Titan. Das geschätzte Rahmengewicht beträgt 350 g bei einer Diagonale von 700 mm. 3D-Rahmenmodell und Teileliste .Ein fertig montiertes Modell (ohne Kabel):
Er besteht aus Carbonrohren und -platten, Teilen aus Aluminium und Verbindungselementen aus Titan. Das geschätzte Rahmengewicht beträgt 350 g bei einer Diagonale von 700 mm. 3D-Rahmenmodell und Teileliste .Ein fertig montiertes Modell (ohne Kabel): Das Gesamtgewicht des Copters mit Elektronik, Li-Ion 6S2P-Akku und Kabeln sollte 1931 betragen.Ja, es schien mir auch, dass die Drohne für eine autonome Version zu kahl war und der feine Regen die Bordelektronik leicht benetzen würde. Deshalb habe ich ein wenig Plastik hinzugefügt:
Das Gesamtgewicht des Copters mit Elektronik, Li-Ion 6S2P-Akku und Kabeln sollte 1931 betragen.Ja, es schien mir auch, dass die Drohne für eine autonome Version zu kahl war und der feine Regen die Bordelektronik leicht benetzen würde. Deshalb habe ich ein wenig Plastik hinzugefügt: 3D-Modell des Rahmens . Liste der Rahmendetails .3D-Modellmontage . Liste der Komponenten .Das Gewicht eines leeren Rahmens mit einer Hülle von 384 g, Gesamtgewicht 2020 g, geschätzte Aufhängezeit bei einer Ladung (Batterieentladung bis zu 20%): 44 Minuten.
3D-Modell des Rahmens . Liste der Rahmendetails .3D-Modellmontage . Liste der Komponenten .Das Gewicht eines leeren Rahmens mit einer Hülle von 384 g, Gesamtgewicht 2020 g, geschätzte Aufhängezeit bei einer Ladung (Batterieentladung bis zu 20%): 44 Minuten.Box zum Aufladen
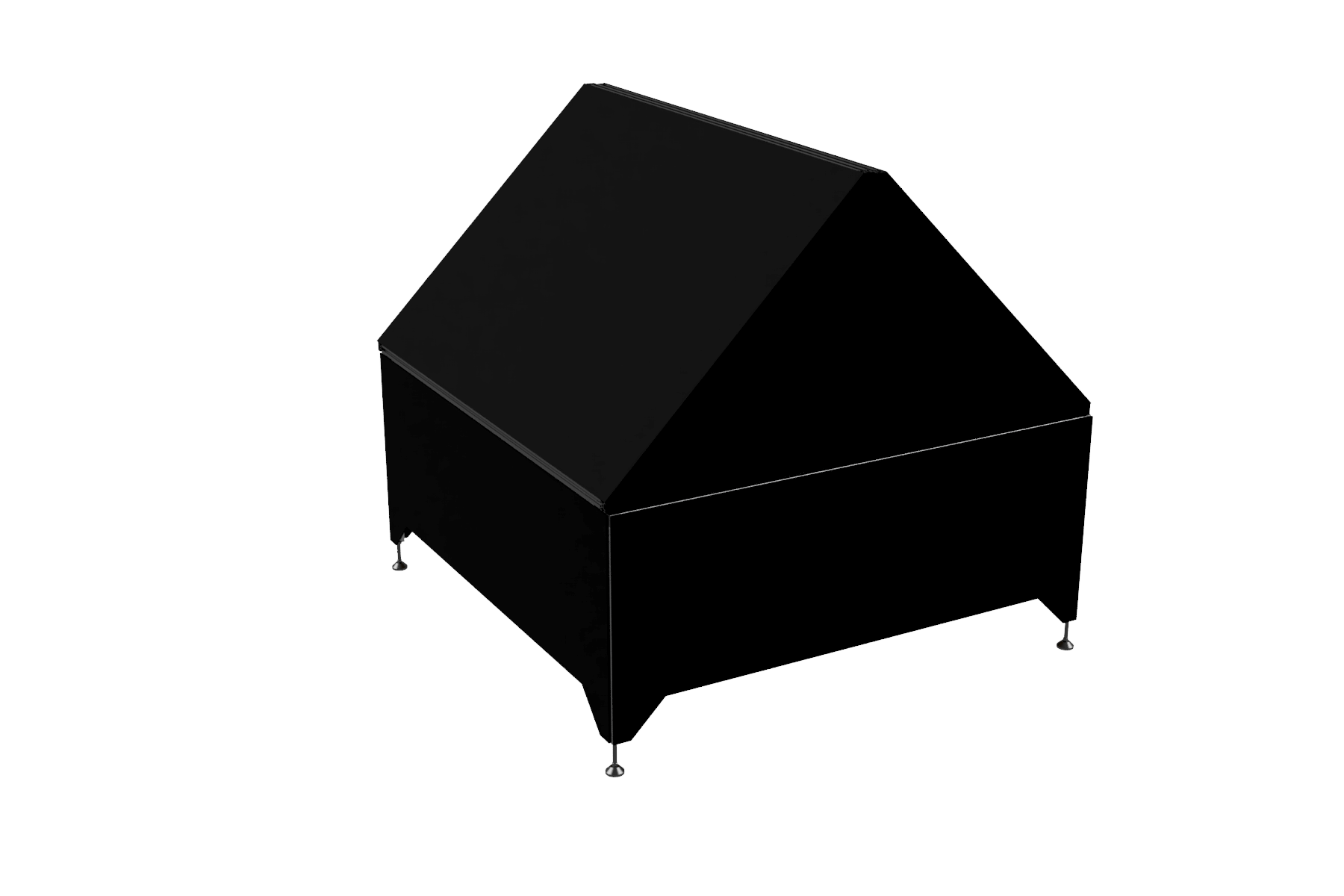
 Die Ladebox besteht aus einem Aluminiumprofil, Montageteilen und Aluminium-Sandwichelementen. Es wird einen Router, einen Computer, Wettersensoren und eine Kamera mit Blick auf die Landezone haben. Ich beschloss, ein schräges Dach mit zwei Flügeln zu bauen, damit sich im Winter kein Schnee ansammelt und die Öffnung nicht beeinträchtigt. Der Mechanismus zum Öffnen der Ventile ist noch nicht vollständig durchdacht und das Ladesystem ist noch nicht definiert (ich brauche Tipps).
Die Ladebox besteht aus einem Aluminiumprofil, Montageteilen und Aluminium-Sandwichelementen. Es wird einen Router, einen Computer, Wettersensoren und eine Kamera mit Blick auf die Landezone haben. Ich beschloss, ein schräges Dach mit zwei Flügeln zu bauen, damit sich im Winter kein Schnee ansammelt und die Öffnung nicht beeinträchtigt. Der Mechanismus zum Öffnen der Ventile ist noch nicht vollständig durchdacht und das Ladesystem ist noch nicht definiert (ich brauche Tipps). Im nächsten Artikel werde ich Ihnen erklären, wie Sie eine Drohne über das Internet über die GUI oder die Befehlszeile konfigurieren und starten, welche Ladesysteme ich derzeit auswähle, welche Software zur Steuerung des Flugzeugs und zur Analyse von Bildern verwendet wird und warum mein erster Flug über das Internet nicht so lange dauerte:
Im nächsten Artikel werde ich Ihnen erklären, wie Sie eine Drohne über das Internet über die GUI oder die Befehlszeile konfigurieren und starten, welche Ladesysteme ich derzeit auswähle, welche Software zur Steuerung des Flugzeugs und zur Analyse von Bildern verwendet wird und warum mein erster Flug über das Internet nicht so lange dauerte:
Fortsetzung folgt...Teil 2 über Software.