UAVs sind zu vielen Dingen fähig: von Schießberichten und Hochzeiten bis zur Überwachung von Waldgebieten, um schnell auf Brände zu reagieren und den Status von Energienetzen und Ölpipelines zu verfolgen. Potenziell fliegende Roboter können in Innenräumen eingesetzt werden, müssen jedoch dafür zügig und leistungsfähig genug sein, um mit der Umwelt zu interagieren. Zu diesem Zweck haben japanische Experten einen modularen DRAGON-Roboter entwickelt, der einem fliegenden Tentakel ähnelt, dessen Form sich ändert, um kleine Löcher zu durchdringen, und in Zukunft als Manipulator fungiert.
Während Rettungsaktionen muss der Roboter möglicherweise durch die Tür eindringen und dann viele andere gefährliche Hindernisse überwinden - nicht gegen eine Wand, einen Schrank, einen Ficus oder eine Person stoßen. Um dieses Problem zu lösen, können Sie einen sehr kleinen Roboter bauen, der in jeden Steckplatz fliegt. Aber es wird nur zur Beobachtung passen. Sie können die Drohne mit einem Schutzrahmen ausstatten - aber eine so sperrige Drohne kann nicht so gut mit der Umgebung interagieren, das heißt, sie hilft wiederum nur bei Suchvorgängen. Idealerweise sollte der Roboter sowohl klein als auch flink sein, aber leistungsstark genug.
Das
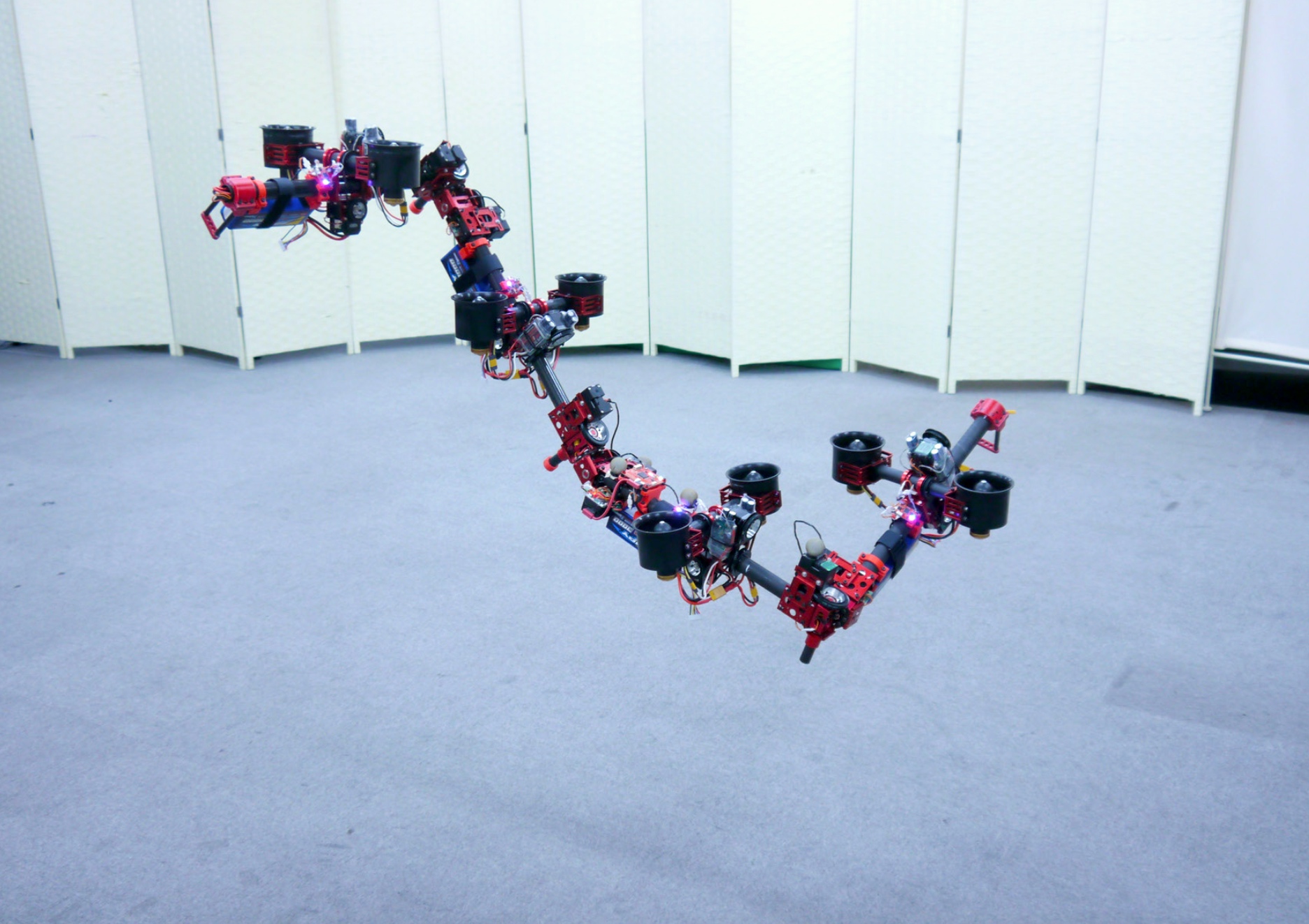
JSK Lab an der University of Tokyo Robotics hat den DRAGON-Roboter entwickelt, der für einen in zwei Rotoren eingebetteten Multilink-Roboter mit der Fähigkeit zur Lufttransformation mit mehreren Freiheitsgraden steht. Das modulare Gerät ändert im Handumdrehen seine Form - es verwandelt sich von einem quadratischen Hubschrauber in eine dünne Schlange, die es ihm ermöglicht, in enge Passagen einzudringen oder eine andere Form anzunehmen.
DRAGON besteht aus Modulen, die jeweils mit zwei Lüftern in der Ringhaube ausgestattet sind. Die Lüfter ändern ihre Position, wodurch sich die Module in verschiedene Richtungen bewegen, sodass der Roboter in nahezu jeder Form fliegen kann, die es ihm ermöglicht, Freiheitsgrade zu erreichen. Die Module sind durch drehbare Halterungen verbunden. Das Gerät arbeitet auf Basis eines kompakten
Intel Euclid- Computers. Die Batterie hält drei Flugminuten, Wissenschaftler müssen daran arbeiten, diesen Indikator zu verbessern. Es kann davon ausgegangen werden, dass das Gerät per Kabel aufgezeichnet wird. In diesem Fall verliert es jedoch an Manövrierfähigkeit oder es werden andere unabhängige Stromquellen gefunden.
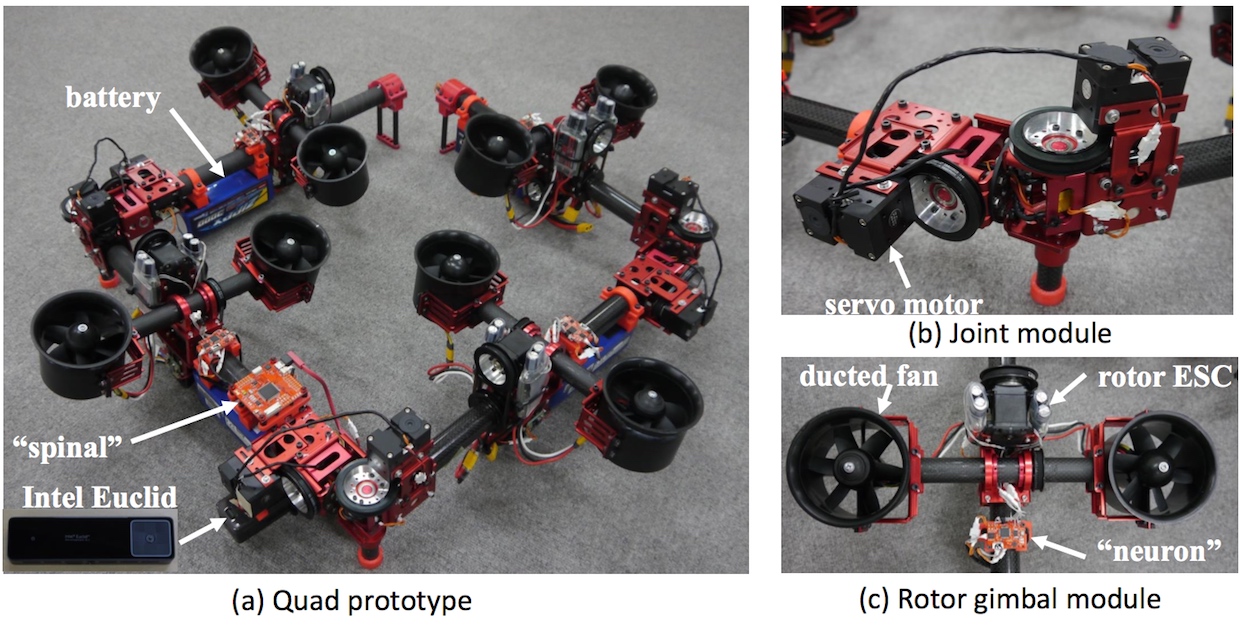
Ein Prototyp von vier Modulen mit insgesamt acht Lüftern. Eine der Aufgaben der Entwickler bestand darin, eine Software zu entwerfen, mit der der Roboter unabhängig entscheiden kann, welche Form er in einem bestimmten Fall annehmen soll. In dem Video zeigten die Entwickler, wie ein Roboter in Form einer Schlange durch eine kleine "Luke" fliegt.
In Zukunft wird der Roboter aus zwölf Modulen bestehen und gleichzeitig Objekte mit den Extremmodulen als Zwei-Finger-Griff anheben können. Es kann angenommen werden, dass ein solcher Roboter ein Objekt umwickeln kann, um es zu übertragen, oder auf andere Weise mit seiner Umgebung interagieren kann.
Flugroboter werden zur Rettung und Überwachung eingesetzt. In offenen Räumen können Quadrocopter
eine Rettungsboje ertrinken lassen ,
einer Person einen Defibrillator liefern , überwachen, was passiert, um verlorene Personen zu finden, und das Gelände in Notfällen überwachen, um schnell reagieren zu können. Bei geschlossenen Räumen gibt es Prototypen von Serpentinenrobotern - zum Beispiel einen weichen Roboter von Forschern der
Stanford University , der die Größe von Objekten ändert, sie streckt, biegt und greift, sich auf eine große Höhe erhebt, in sehr kleine Schlitze klettern kann oder beispielsweise unter einer Box bis zu 100 Kilogramm, um es zu heben. Die Softshell geht sogar durch scharfe Gegenstände wie Nägel und verändert ihre Form - die Pumpen pumpen Luft in das Gehäuse.
Ein 8-Meter-
Gerät japanischer Entwickler der Tohoku-Universität wurde entwickelt, um nach Menschen bei Erdbeben zu suchen. Der Roboter bewegt sich mit einer Geschwindigkeit von bis zu 10 Zentimetern pro Sekunde und "fingert" die borstige Oberfläche. Eine frühe Version dieses Roboters wurde während der Liquidation der Folgen der
Katastrophe im Kernkraftwerk Fukushima eingesetzt , bewegte sich jedoch hauptsächlich in eine Richtung - vorwärts. Der neue Roboter erwies sich als mobiler.
Es gab Versuche, Flug- und Serpentinenroboter zu kombinieren.
Ein Quadrocopter von Wissenschaftlern der University of Pennsylvania vor Ort liefert zwei Serpentinenroboter, die die Treppe hinaufsteigen oder in die Risse eindringen können.
Der Prototyp von JSK Lab wird die Vorteile von Flugrobotern mit Serpentinenrobotern kombinieren und auf verschiedene Weise mit Objekten interagieren, anstatt nur zu beobachten. Ein Mitarbeiter des JSK-Labors beschreibt DRAGON als "Durchbruch in Bezug auf das strukturelle Design" und "eine ideale Plattform für Luftmanipulatoren".