Im letzten
Beitrag haben wir darüber gesprochen, welche Projekte der intellektuellen Robotik für die Sberbank von Interesse sind. Heute werden wir die Cobots analysieren: Geschichte, Klassifizierung, wie sie verdient oder zur Lösung ihrer Probleme verwendet werden können.
 Quelle: Universalroboter
Quelle: UniversalroboterTeil 1. Was ist ein Cobot?
Es reicht nicht aus, Ihren Roboter als kollaborativ zu bezeichnen. Es muss den Anforderungen internationaler Normen entsprechen, von denen die
Hauptnorm ISO / TS 15066: 2016 (amerikanisches Analogon
ANSI / RIA TR R15.606: 2016 ) ist. Es ist zwar richtiger zu sagen, dass dies kein Standard, sondern eine technische Spezifikation ist. Es gibt einen Unterschied: ISO entwickelt manchmal technische Spezifikationen, bevor endgültige offizielle Standards herausgegeben werden. Dies ist eine Anerkennung der Tatsache, dass der aktuelle Stand der kollaborativen Robotik dynamisch ist und sich im Laufe der Zeit weiterentwickeln wird.
Das Format der technischen Spezifikationen wird benötigt, um den Status „hier und jetzt“ festzulegen, damit die Community arbeiten kann, da sie weiß, dass es in Zukunft Änderungen geben wird.
Laut ISO ist ein
Cobot (kurz für
Collaborative Robot ) ein Roboter, der für die direkte Interaktion mit einer Person in einem bestimmten
Gelenkraum entwickelt wurde .
Für die Zusammenarbeit kann ein kollaborativer Roboter verwendet werden (
ISO 10218 ).
Zusammenarbeit ist ein Zustand, in dem ein speziell entwickeltes Robotersystem und ein Bediener im Rahmen eines gemeinsamen Arbeitsbereichs arbeiten.
Gelenkraum - ein geschützter Arbeitsbereich, in dem ein Roboter und eine Person gleichzeitig Aufgaben während eines Fertigungsvorgangs ausführen können.
Höchstwahrscheinlich haben Sie Fragen:
- Wird der Roboter kooperativ, wenn ich den Schutzzaun von einem herkömmlichen Industrieroboter entferne? Nein
- Wird der Roboter kooperativ, wenn ich die Kraft und Stärke des Manipulators einschränke? Nein , weil Ein scharfer Gegenstand kann selbst mit wenig Kraft eine Person beschädigen
- Wenn der Roboter kollaborativ ist, bedeutet dies, dass ich keine Risikobewertung durchführen muss? Eine Risikobewertung muss durchgeführt werden.
Einfach ausgedrückt ist dies ein Roboter, der Aufgaben in einem gemeinsamen Raum mit einer Person ausführen kann, ohne sie zu schädigen. Das heißt,
eine Person im Arbeitsbereich eines Cobots zu finden, ist absolut sicher . Unterschiede des Cobots zum üblichen Industrieroboter:
- Viele von ihnen sind billiger als der übliche Industrieroboter: 24.000 USD statt 40.000 USD;
- einfacher zu installieren und zu konfigurieren (Roboter wiegen ca. 30 kg, Sie benötigen nur eine 220-V-Steckdose, es gibt eine grafische Benutzeroberfläche);
- es ist flexibel, es ist leicht zu ändern (intuitive Programmierschnittstellen, es ist nicht sicher für Mensch und Umwelt.
Bisher bestand das Mittel zum Schutz von Personen darin, sie mit physischen Schutzvorrichtungen, beispielsweise Zellen, von der Roboterausrüstung zu trennen.

 Pixabay.comControleng.com
Pixabay.comControleng.comMit dem Aufkommen kollaborativer Robotersysteme hat sich dieses Paradigma geändert: Jetzt können Sie zusammenarbeiten.

 www.objektifhaber.com/aslan-gibi-dostluk-94036-haberwww.ge.com/reports/3-1b-collaborative-co-bot-market-isnt-hazard-freeWarum ist das gut?
www.objektifhaber.com/aslan-gibi-dostluk-94036-haberwww.ge.com/reports/3-1b-collaborative-co-bot-market-isnt-hazard-freeWarum ist das gut? Weil wir eine Synergie der Stärken des Roboters (hohe Geschwindigkeit und Genauigkeit bei Routineoperationen) und des Menschen (kreatives Denken, Arbeiten in nicht standardmäßigen Situationen) erzielen. Dies erhöht die Produktivität in der Industrie, was sich positiv auf die Gesamtwirtschaft auswirkt.
ISO / TS 15066: 2016 ist die weltweit erste Spezifikation von Sicherheitsanforderungen für kollaborative Roboter. Das Dokument wurde seit 2010 von einem ISO-Ausschuss (dem Experten aus 24 Ländern und führenden Fertigungsunternehmen angehörten) entwickelt. Es soll die Anforderungen und Empfehlungen für den gemeinsamen Betrieb eines Industrieroboters ergänzen, die in ISO 10218-1 und ISO 10218-2 („Sicherheitsanforderungen für Industrieroboter“) beschrieben sind. ISO / TS 15066 definiert Sicherheitsanforderungen für den gemeinsamen Betrieb von Industrierobotersystemen und ein Arbeiten Mittwoch. Das Dokument enthält Anleitungen für diejenigen, die Risikobewertungen durchführen, wenn Menschen und Roboter zusammenarbeiten.
Gemäß ISO / TS 15066 gibt es 4 Formen der Zusammenarbeit:- Kontrollierter Stopp (Sicherheitsbewerteter kontrollierter Stopp) ;
- Manuelle Führung ;
- Geschwindigkeits- und Trennungsüberwachung ;
- Kraft- und Kraftbegrenzung
Lassen Sie uns jeden von ihnen genauer betrachten.
Sicherheitsbewerteter überwachter StoppDieses Formular wird verwendet, wenn der Roboter hauptsächlich alleine agiert, aber manchmal muss eine Person den Arbeitsbereich betreten. Zum Beispiel verarbeitet ein Roboter ein Werkstück, aber mitten im technologischen Prozess muss eine Person eine Operation damit ausführen, die der Roboter nicht ausführen kann. Wenn eine Person eine vorgegebene Sicherheitszone betritt, bleibt der Roboter stehen. Gleichzeitig verschwindet die Leistung der Motoren nicht - sie halten an. Dies ist ein sehr wichtiger Punkt, da der Roboter die Arbeit sofort wieder aufnimmt, nachdem eine Person die Sicherheitszone verlassen hat. So können Sie keine Zeit mit einem vollständigen Neustart des Arbeitsprogramms verschwenden, wie dies bei einem vollständigen Stopp des Roboters der Fall ist. Wenn die Leute ständig am Roboter vorbeikamen, hatte er einfach keine Zeit zum Arbeiten.
- Ein Stopp erfolgt ohne Verlust der Motorleistung (Pause, nicht Stopp).
- Der Bediener kann mit dem Roboter interagieren.
- Die automatische Arbeit kann fortgesetzt werden, wenn eine Person den Arbeitsbereich verlässt.
- Zu einem bestimmten Zeitpunkt kann sich entweder eine Person oder ein Roboter bewegen.
- Es kann mit gewöhnlichen Industrierobotern verwendet werden, Sie müssen jedoch Lichtsicherheitsbarrieren (Laser-Entfernungsmesser, Fotodetektoren) hinzufügen.
Manuelle FührungDiese Form der Zusammenarbeit wird für präzise Operationen mit schweren Objekten verwendet (z. B. zum Einbau von Autotüren). Diese Form kann verwendet werden, um mit gewöhnlichen Industrierobotern zu arbeiten. Mit einem zusätzlichen Gerät, das die Kräfte „erfasst“, die der Arbeiter auf den Manipulator ausübt, ist dies normalerweise ein Drehmomentsensor am Roboterflansch.
- Der Bediener steht in direktem Kontakt mit dem Roboter.
- Der Roboter wird manuell gesteuert.
- Sowohl Menschen als auch Roboter können sich gleichzeitig bewegen (Bewegungen werden von Menschen gesteuert).
- Es können gewöhnliche Industrieroboter verwendet werden.
- Zusätzliche Ausrüstung erforderlich (Drehmomentsensor).
Geschwindigkeits- und TrennungsüberwachungHier wird die Umgebung des Roboters durch leichte Sicherheitsbarrieren gesteuert, die wie bei der ersten Form der Zusammenarbeit die Position von Personen verfolgen. Der Unterschied liegt im Szenario: Wenn in der ersten Form die Hauptaufgabe des Roboters darin besteht, anzuhalten, dann ist hier die gleichzeitige Arbeit einer Person und eines Roboters. Das Verhalten des Roboters hängt von den in seinem Steuerprogramm vorkonfigurierten Zonen ab: Wenn sich eine Person nähert, verringert der Roboter die Geschwindigkeit seiner Bewegungen, und wenn eine Person so nahe kommt, dass eine Kollision unvermeidlich ist, tritt ein Stopp auf. Wenn sich eine Person weiter entfernt, nimmt der Roboter die Arbeit wieder auf und beschleunigt.

- Die Geschwindigkeit des Roboters nimmt ab, wenn sich eine Person nähert.
- Der Roboter stoppt, wenn eine Kollision mit einer Person auftritt.
- Eine Person und ein Roboter können sich gleichzeitig bewegen.
- Es kann mit gewöhnlichen Industrierobotern verwendet werden, Sie müssen jedoch Lichtsicherheitsbarrieren (Laser-Entfernungsmesser, Fotodetektoren) hinzufügen.
- Wird für Operationen verwendet, bei denen häufig Personal anwesend sein muss.
Bild: Roberta Nelson Shea - „ISO / TS 15066 Einführung“Alle drei oben beschriebenen Formen der Zusammenarbeit können mit herkömmlichen Industrierobotern verwendet werden, sofern zusätzliche Geräte verfügbar sind. Solche Lösungen werden als
kollaborative Robotersysteme bezeichnet . Der Unterschied zwischen einem
kollaborativen Roboter besteht darin, dass er möglicherweise keine zusätzlichen (externen) Sicherheitsvorrichtungen verwendet - diese sind bereits eingebaut. Ein weiterer wichtiger Unterschied zwischen kollaborativen Robotersystemen und kollaborativen Robotern besteht darin, dass bei der Zusammenarbeit der Kontakt mit einer Person ausgeschlossen ist. Ein kollaborativer Roboter kann jedoch mit dem menschlichen Körper in Kontakt sein, ohne ihn zu schädigen. Dies wird erreicht, indem Leistung und Aufwand begrenzt werden.
Kraft- und KraftbegrenzungDie meisten Menschen, die den Cobot repräsentieren, meinen einen Roboter, der diese besondere Form der Zusammenarbeit nutzt. Daher betrachten wir es genauer.
In den "Gelenken" des Roboters befinden sich Drehmomentsensoren, die die Tatsache einer Kollision mit einer Person bestimmen können. Wenn die Sensoren einen Überschuss an zulässigen Kräften feststellen, stoppt der Roboter. Diese Roboter sind auch so konstruiert, dass sie im Falle eines Aufpralls Kräfte auf eine breite Oberfläche verteilen. Deshalb werden die Details ihres Körpers meist mit abgerundeten Formen hergestellt. Die Funktionalität zur Begrenzung von Kraft und Stärke ist in der Regel in der Standardsoftware enthalten.
- Die Stärke und Leistung des Roboters werden so gesteuert, dass ein versehentlicher Kontakt zwischen dem Roboter und dem Bediener keinen Schaden verursacht.
- Eine Person und ein Roboter können sich gleichzeitig bewegen.
- Mögliche Maßnahmen zur Risikominderung:
- Konstruktionsfaktoren für Roboter (z. B. abgerundete Formen, formbare Materialien);
- eine geeignete Auswahl der Anwendungen und des Designs der Roboterzelle (z. B. Greifer, Werkstück, Flugbahn usw.).
Es gibt zwei Arten von Kontakten in PFL: transient (transient) und quasistatisch (quasistatisch) .
| Übergangskontakt
| Quasistatisch
Kontakt
|
Beschreibung
| Kontaktereignis „kurz“ (<50 ms).
Ein Teil des menschlichen Körpers kann normalerweise springen.
| Der Kontakt kann lang sein.
Ein Teil des menschlichen Körpers kann erfasst werden.
|
Begrenzungskriterien (was verwaltet werden muss)
| Impulsanstrengung, Druck, Spannung.
Energieübertragung, spezifische Leistung.
| Spitzenkräfte, Druck, Spannung
|
Zugänglichkeit in Design / Kontrolle
| Roboterposition, Nutzlast.
Geschwindigkeit (relativ).
Kontaktbereich, Dauer.
| Stärke (Verbindungsmomente, Position).
Kontaktbereich, Dauer.
|
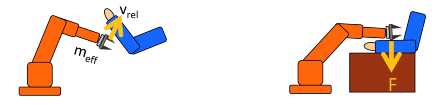 Bild: Björn Matthias - „Kollaborative Roboter Power and Force Limiting“Maßnahmen zur Risikominderung
Bild: Björn Matthias - „Kollaborative Roboter Power and Force Limiting“Maßnahmen zur Risikominderung | Übergangskontakt
| Quasi statischer Kontakt
|
Bau
| Abnahme des effektiven Gewichts.
Vergrößerte Kontaktfläche.
Erhöhte Kontaktdauer.
| Vergrößerte Kontaktfläche.
|
Management
| Abnahme der Relativgeschwindigkeit.
Verringerung der effektiven Masse durch geeignete Positionsauswahl.
| Maximales Drehmoment und maximale Leistung reduzieren.
Reduzierte Kontaktzeit.
|
Die ultimative Konfiguration ist das Gleichgewicht zwischen Sicherheit und Leistung.Die technische Spezifikation ISO / TS 15066 enthält eine von der Universität Mainz entwickelte Tabelle zur Schmerzschwelle, die eine Liste der Kraft- und Druckniveaus für die Gestaltung der Anstrengungen des Roboters enthält (die Schmerzschwelle von 100 Personen an 29 Schmerzpunkten wurde untersucht).


 Quelle: ISO / TS 15066: 2016, Abb. 4, Abb. A.1
Quelle: ISO / TS 15066: 2016, Abb. 4, Abb. A.1 Quelle: ISO / TS 15066: 2016.Quelle: R. Nelson Shea, NRSC 2016 Präsentation. Verwendung mit GenehmigungDenken Sie daran: Sicherheit ist das Fehlen von Verletzungen.
Quelle: ISO / TS 15066: 2016.Quelle: R. Nelson Shea, NRSC 2016 Präsentation. Verwendung mit GenehmigungDenken Sie daran: Sicherheit ist das Fehlen von Verletzungen.Teil 2. Die Geschichte der Cobots
Der erste Cobot wurde 1996 von
J. Edward Colgate und
Michael Peshkin von der Northwestern University (USA) entwickelt. Zum Vergleich: Zu diesem Zeitpunkt wurden seit über 30 Jahren konventionelle Industrieroboter hergestellt. Der Begriff „Cobot“ wurde jedoch als Ergebnis eines Wettbewerbs um den besten Namen von einer anderen Person derselben Universität geprägt - Brent Gillespie. Das Wall Street Journal mochte den Begriff so sehr, dass sie ihn auf die Liste der
Worte von morgen setzten und einen Preis von 50 US-Dollar verliehen
Das erste Cobot-Patent wurde im Februar 1996 in den Vereinigten Staaten angemeldet (
US 5,923,129 ) und das Patent unter Verwendung des Begriffs Cobot im Oktober 1997 (
US 5,952,796 ).
Fotos der ersten Cobots sind hier zu sehenDie Entwicklung von Cobots an der Northwestern University wurde von den Unternehmensfonds General Motors und Ford sowie der US National Science Foundation unterstützt. Im selben Jahr 1996 gründeten Wissenschaftler die Firma Cobotics (2002 wurde sie von Stanley Assembly Technologies übernommen).
Die Cobots gewannen ihre aktuelle Popularität dank des Auftretens der Firma Universal Robots (Dänemark) im Jahr 2005. Die Idee eines billigen und einfach einzurichtenden und zu bedienenden Roboters (im Vergleich zu einem Industrieroboter) kam den Gründern bereits 2003. Nach mehreren Prototypen veröffentlichte das Unternehmen 2008 den ersten Serienprototyp des UR5-Roboters (den bislang beliebtesten) und erhielt Investitionen von der dänischen Regierung. 2012 brachte das Unternehmen einen zweiten Roboter (UR10) auf den Markt, der 2015 von der amerikanischen Teradyne für 285 Millionen US-Dollar erworben wurde.
Nach dem Erfolg von Universal Robots wurden Cobots von Unternehmen hergestellt, die den Markt für Industrieroboter (FANUC, ABB, KUKA, BOSCH und andere) lange und erfolgreich besetzt hatten, und ähnliche Startups
tauchten auf:
Rethink Robotics , Doosan Robotics, Techman Robot. Zu den jungen Projekten gehören auch Einwanderer aus den GUS-Ländern - das belarussische Startup Rozum Robotics.
Teil 3. Wo und wie werden Cobots eingesetzt?
Wie viele Cobots auf der Welt? Trotz der wachsenden Beliebtheit von Cobots wurden sie in der jährlichen Studie von World Robotics, die die wichtigste Datenquelle der Branche, die International Federation of Robotics (IFR), betreibt, noch nicht in einer separaten Klasse ausgewählt.
Derzeit werden weltweit rund 2 Millionen Industrieroboter eingesetzt (IFR-Prognose für 2017). Wie viele von ihnen zusammenarbeiten, ist nicht genau bekannt. Es gibt eine Bewertung von Barclays Research, wonach im Jahr 2017 32.000 Cobots in Betrieb waren, von denen die überwiegende Mehrheit von
Universal Robots hergestellt wurde .
Vor einigen Jahren galten Cobots ausschließlich als Laborgeräte, die keinen Platz in der Produktion haben, aber die Möglichkeit einer flexiblen Konfiguration und minimaler Integrationskosten ermöglichte es uns, die psychologische Barriere zu überwinden. Heute werden Roboter dieser Klasse in der Leicht-, Lebensmittel- und sogar in der Automobilindustrie eingesetzt, die traditionell von klassischen Robotern besetzt ist.
Barclays Research
schätzt den Markt für 2017 auf 800 Millionen US-Dollar. Es gibt Hinweise darauf, dass bis zu einem Drittel der Cobots
in China verkauft werden . IFR bewertete den Markt für Industrieroboter im Jahr 2017 mit 13,1 Milliarden US-Dollar.
Prognose für zukünftige Jahre:
IFR prognostiziert die Gesamtmarktgröße von Industrierobotern bis 2020 auf 23,2 Milliarden US-Dollar. Wenn wir die Schätzungen von Barclays und IFR vergleichen, wird der Anteil der Cobots an der Gesamtmenge spürbar steigen: von 6,1% im Jahr 2017 auf 13,5% im Jahr 2020 - ziemlich dynamisch.
Was Cobots können:- Pick & Place: Laden Entladen Förderband.
- Laden / Entladen von Werkstücken in Maschinen.
- Testen und Sortieren von Teilen: Überprüfen oder Sortieren von zufälligen Objekten auf dem Förderband im Rahmen der Qualitätskontrolle oder anderer Anforderungen.
- Verpackung: Sammlung und Platzierung von Gegenständen in Behältern für Transport oder Lagerung.
- Einfache Montage: Montage von Elektronik und Haushaltsgeräten.
- Endbearbeitungsvorgänge: Entfernen von überschüssigem Kunststoff oder Metall von Teilen.
Cobot-Wachstumstreiber in den kommenden Jahren:1. Cobots sind billiger als gewöhnliche Industrieroboter (~ 25.000 USD statt ~ 50 USD) -> Die Einstiegsschwelle für kleine und mittlere Unternehmen (KMU) wird gesenkt.
2. Cobots sind einfacher einzurichten: Es ist nicht erforderlich, programmieren zu können. Nach einem Trainingstag kann der Mitarbeiter den Roboter so konfigurieren, dass er Aufgaben mittlerer Komplexität ausführt.
Sie können es selbst versuchen . Das heißt, es müssen keine Servicetechniker oder Systemintegratoren eingestellt werden -> die Einstiegsschwelle für KMU sinkt erneut.
3. Kobotov ist leichter zu bewegen: Sie sind einfacher als industrielle, sie benötigen keine lokale Infrastruktur in Form eines Käfigs -> die Attraktivität für KMU steigt, da die Produktion schnell wieder eingestellt werden kann.
4. Der
Anstieg der Kosten für Handarbeit aufgrund einer alternden Bevölkerung und ein
Rückgang der Zahl der arbeitsfähigen Menschen (Arbeitnehmerquote pro Stunde: 40 € in Deutschland, 12 € in den USA, 11 € in Osteuropa und 9 € in China. Die Kosten für den Cobot betragen 6 $ / Stunde). .
5. Die Wiederherstellung der Synergie früherer Faktoren führt dazu, dass die USA und die EU die Produktion aus China in ihre Heimat zurückführen. Dies kann dazu beitragen, die Versandkosten zu senken und die Produktqualität zu verbessern.
6. Staatliche Programme zur Automatisierung und Robotisierung der Produktion. Sie können die Anschaffung und den Einsatz von Robotern stimulieren und unterstützen (auch finanziell):
- „Industrie 4.0“ in Deutschland;
- "Made in China 2025" in China;
- "Nationale Robotikinitiative 2.0" in den USA.
Teil 4. Wer produziert die Cobots?
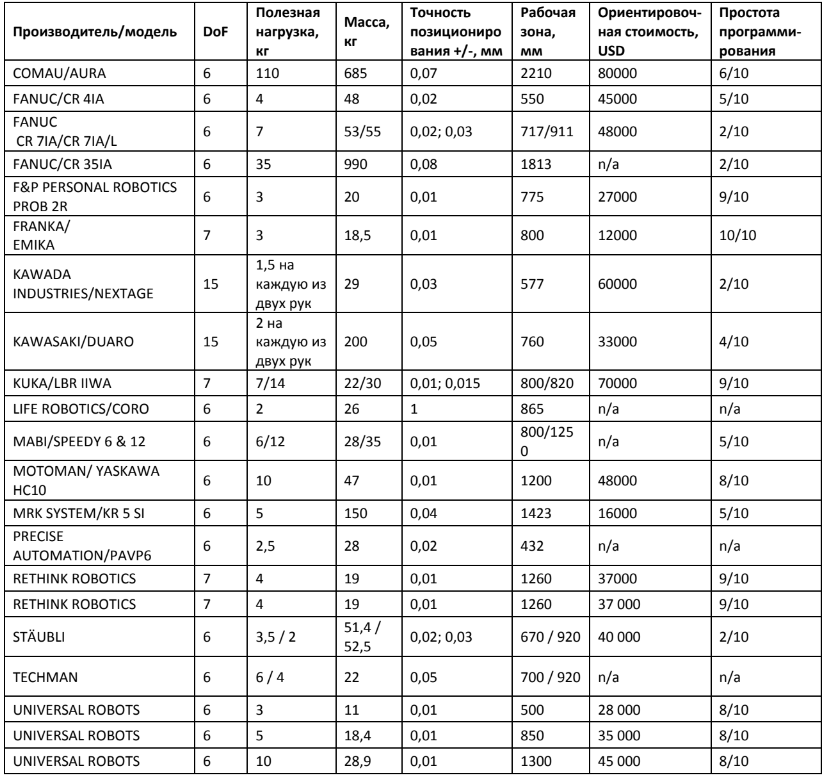 Tabelle herunterladen
Tabelle herunterladenTeil 5. Wie Sie mit Cobots verdienen können und wie Sie sie zur Lösung Ihrer Probleme einsetzen können
So verdienen Sie Geld mit Cobots:
Um Cobots zur Lösung ihrer Probleme einzusetzen, müssen potenzielle Prozesse (Aufgaben) für die Automatisierung identifiziert werden. Ideal für die erste Automatisierung sind sich wiederholende Aufgaben mit einem hohen Maß an Sicherheit (vorhersehbar).
| Einfach
zu automatisieren
| Schwer
zu automatisieren
|
Die Aufgaben
| Objekte ohne Anstrengung einer Flugbahn folgen
oder mit ständiger Anstrengung
| Kraftsteuerung, z. B. Polieren oder Präzisionsmontage
|
Gegenstände
| Eine kleine Auswahl an Artikeln (Größen, Masse,
Material), bekannte und gewöhnliche Formen (Zylinder, Kasten)
| Eine Vielzahl von Gegenständen, komplexe Formen,
verformbare und zerbrechliche Gegenstände
|
Anordnung der Themen
| Gleichmäßig gestapelte Gegenstände: in einer Schachtel, gestapelt oder auf einer Palette
| Gegenstände werden in eine Kiste / einen Korb geworfen oder weitergezogen
schneller Förderer
|
Integration mit anderen Geräten
| Verwenden der von einer Person verwendeten Schnittstellen:
Knöpfe, Stifte
| Anschluss und Konfiguration von Sensoren, Software-Integration
mit Werkzeugmaschinen
|
Programmierung
| Wiederholte Bewegungen in einer Sequenz (ohne
Bedingungen und Bäume)
| Komplexe Logik und viele Bedingungen abhängig von
Informationen von Sensoren
|
Hier können Sie den ROI Ihres Robotikprojekts berechnen.Der Artikel verwendete die Übersetzung der folgenden Veröffentlichungen:
- Carole Franklin - „Überblick ISO / TS 15066: 2016“
- Roberta Nelson Shea - "ISO / TS 15066 Einführung"
- Bjoern Matthias - "Kollaborative Roboter Power and Force Limiting"
- blog.robotiq.com/what-does-collaborative-robot-mean
- Robotiq - „Cobot eBook“, „Erste Schritte mit kollaborativen Robotern“, „ISO / TS 15066 Explained“
Der Text wurde von Albert Efimov und Denis Zatyagov vom Sberbank Robotics Laboratory erstellt