Wie wir bereits geschrieben
haben , sind industrielle Exoskelette einer der vorrangigen Bereiche unserer Laborarbeit.
Wenn wir das Wort Exoskelett hören, erhebt sich immer das Bild von Robert Downey Jr. vor uns, gekleidet in die lila-goldene Rüstung von Iron Man, in die Wolken schwebend und die Feinde der Menschheit links und rechts zerstreuend.
Exoskelette, die heute existieren und entwickelt werden, sind noch nicht in der Lage, mehrere Tonnen schwere Lasten zu heben, in der Stratosphäre zu fliegen und Überschallgeschwindigkeiten zu entwickeln, aber vielleicht ist dies von ihnen nicht erforderlich?

Was ist ein Exoskelett?
Die internationale Norm
ISO 13482: 2014 (de) Roboter und Robotergeräte - Sicherheitsanforderungen für Körperpflegeroboter klassifizieren Exoskelette als Hilfsroboter, die während des Gebrauchs am menschlichen Körper befestigt werden und üblicherweise als Bekleidungsroboter bezeichnet werden. Das US National Land Forces Research Laboratory führte eine
Umfrage unter Entwicklern und Betreibern von Robotik durch, bei der es sich um „gekleidete Robotik“ handelte, bei der sich alle Befragten einig waren:
- Dies sind tragbare Roboterwerkzeuge, deren Elemente direkt am menschlichen Bediener befestigt sind.
- Hierbei handelt es sich um Roboterwerkzeuge, die den Bediener physisch entladen, ihn physisch unterstützen und seine physischen Fähigkeiten verbessern.
Somit ist ein Exoskelett ein tragbares (an einer Person getragenes) mechanisches Gerät oder ein mechatronisches Softwarepaket mit Elementen anthropomorpher Strukturen, das die physischen Fähigkeiten einer Person durch synchrones Duplizieren und Unterstützen ihrer motorischen Aktivität multiplizieren soll. Wenn wir von der Vervielfachung der körperlichen Fähigkeiten sprechen, meinen wir nicht nur das olympische „Schneller! Oben! Stärker! “, Aber auch gesünder, robuster, effizienter, technisch korrekter. Das Exoskelett soll Menschen dabei helfen, einige ihrer bestehenden physiologischen Barrieren zu überwinden, und so die Intelligenz, Kreativität, Anpassungsfähigkeit und Lernfähigkeit eines menschlichen Arbeiters mit der Kraft, Ausdauer und Genauigkeit eines Roboterarbeiters kombinieren. In diesem Abschnitt ist das Exoskelett auch eine besondere Art der kollaborativen Robotik.
Die Geschichte und Entwicklung der Exoskelette

Der Vorläufer eines Exoskeletts kann als elastiped angesehen werden. Elastiped - ein Gerät, das das Gehen, Laufen und Springen für militärische Zwecke erleichtert. Der Autor dieser Erfindung ist der russische Erfinder Nikolai Aleksandrovich Yagn (1849 - 1905). Ende des 19. Jahrhunderts entwickelte und patentierte er mehrere Modifikationen des passiven Exoskeletts
"Elastiped" .
Der erste Versuch, ein Kraft-Exoskelett zu entwickeln, wurde von Spezialisten von General Electric in den frühen 60er Jahren des 20. Jahrhunderts unternommen. Ein Projekt namens Hardiman wurde vom US-Verteidigungsministerium in Auftrag gegeben. Im Rahmen des Projekts wurden eine Zwei-Pediler-Plattform und ein Manipulator mit elektrohydraulischem Getriebe entwickelt, deren Konstruktion das Heben einer Last mit einem Gesamtgewicht von bis zu 680 kg ermöglichen sollte.
Elastiped N. A. Yagna, SkizzeEin wesentlicher Nachteil des Exoskelettdesigns war die Vibration, die während des Betriebs auftrat und dazu führte, dass das Gerät während des Tests wiederholt umkippte. Tests, an denen der Bediener beteiligt war, wurden nicht durchgeführt.
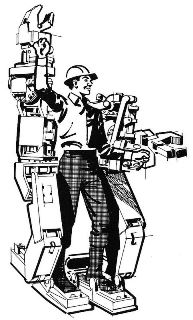
Infolgedessen konzentrierte sich die Forschung auf die Entwicklung eines der Manipulatoren des Exoskeletts. Trotz der Tatsache, dass es den Entwicklern gelang, die angestrebte Tragfähigkeit von 340 kg zu erreichen, betrug die Masse des Geräts selbst fast eine Dreiviertel-Tonne, was mehr als dem Zweifachen der Masse der angehobenen Nutzlast entspricht.
Die Konstruktionsfehler des Geräts konnten nicht behoben werden. Infolgedessen wurde das Hardiman-Projekt 1971 geschlossen, da keine Aussichten für seine weitere Entwicklung bestanden [https://en.wikipedia.org/wiki/Hardiman].
Rechts ist der Prototyp des Hardiman-Exoskeletts.In den 1970er Jahren schuf der jugoslawische Wissenschaftler Miomir Vukobratovich einen Prototyp eines Exoskeletts mit pneumatischem Antrieb, der gelähmten Menschen helfen sollte, wieder auf die Beine zu kommen. In den 80er Jahren präsentierte Vukobratovich der UdSSR sein Exoskelett. Russische und europäische Wissenschaftler stützten sich anschließend bei der Entwicklung ihrer Technologien auf das Projekt von Vukobratovich. So erschien Anfang der 1980er Jahre ein Exoskelett für Menschen mit Behinderungen des Zentralinstituts für Traumatologie und Orthopädie von N. N. Priorov.
Interessanterweise wird das berühmte russische Projekt ExoAtlet von Wissenschaftlern durchgeführt, die gerade das Vukobratovich-Projekt an der Moskauer Staatsuniversität studiert haben.
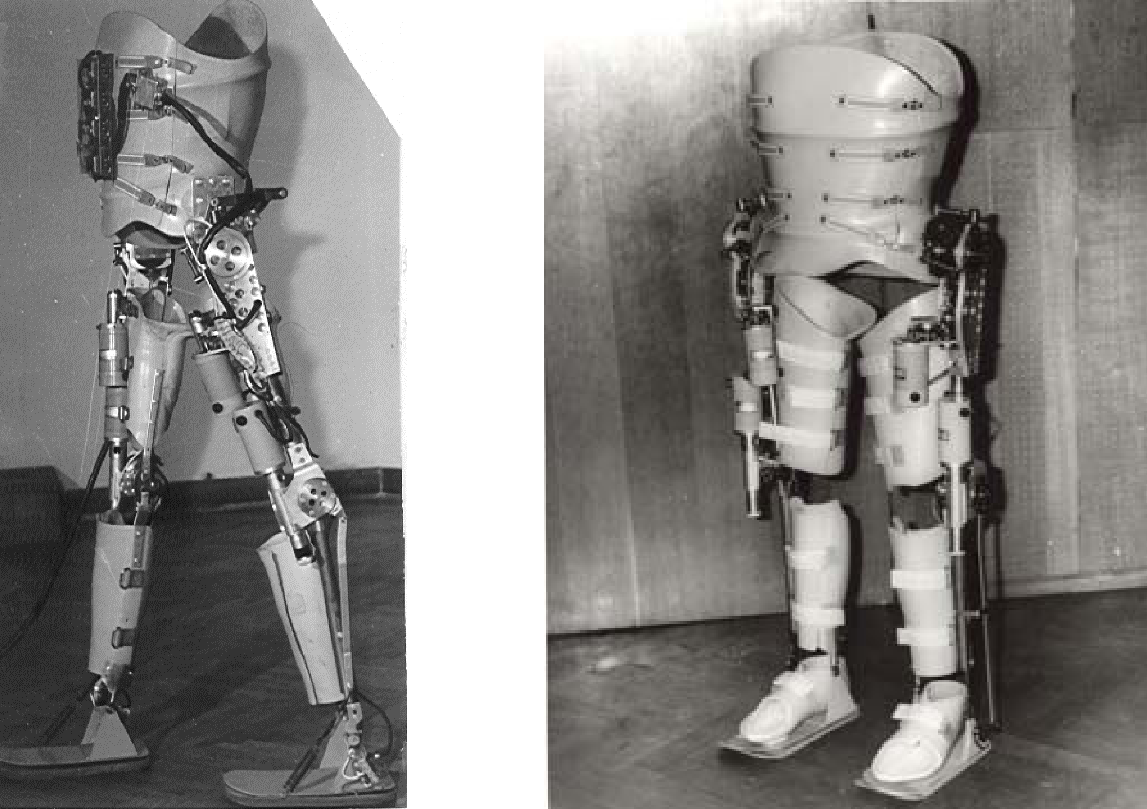 Exoskelett von Miomir Vukobratovich
Exoskelett von Miomir VukobratovichDas Fehlen kompakter und sicherer Energiequellen, das Fehlen wirksamer Leistungskomponenten und Steuerungen behinderte die Entwicklung von Exoskeletten erheblich.

Erst Mitte der 2000er Jahre wurde die Idee eines „Power-Anzugs“ verwirklicht. Beispielsweise initiierte die US-amerikanische Agentur für fortgeschrittene Verteidigungsforschungsprojekte (DARPA) 2001 die Entwicklung von Exoskeletten im Rahmen des Programms Exoskelette for Human Performance Augmentation. Die Agentur finanzierte verschiedene Teilnehmer im Rahmen eines Fünfjahresprogramms mit 50 Millionen US-Dollar. Im Rahmen des Programms wurde das Wearable Energetically Autonomous Robot (WEAR) -System von Sarcos Research aus Salt Lake City, Utah, entwickelt. Als Ergebnis einer weiteren Verfeinerung und Modernisierung wurde das Leistungs-
Exoskelett XOS2 in voller Größe eingeführt, das vom Verteidigungsgiganten Raytheon (der 2007 Sarcos Research übernahm) eingeführt wurde Jahr) im September 2010.
Quelle - ArmeetechnologieDerzeit werden Exoskelettthemen zu einem der sich am dynamischsten entwickelnden Bereiche der Servicerobotik. Dutzende wissenschaftliche Organisationen und Industrieunternehmen in mehreren Ländern der Welt befassen sich mit der Entwicklung eigener Exoskelettkomplexe, darunter die USA, Japan, Israel, Deutschland, China, Frankreich, Neuseeland und Norwegen , Großbritannien, Südkorea, Italien und Russland.
Warum genau industrielle Exoskelette?
Eine Analyse der Welterfahrung lässt den Schluss zu, dass es derzeit drei Schlüsselbereiche für die Anwendung von Exoskelettmodulen und darauf basierenden Komplexen gibt:
- militärische Exoskelette;
- Reha-Exoskelette und Exoskelette, um die mangelnde Mobilität von Menschen mit Behinderungen auszugleichen;
- Exoskelette für den industriellen Einsatz.
Die Richtung industrieller Exoskelette ist heute von größtem Interesse, und dafür gibt es mehrere Gründe.
Grund Nr. 1: der Marktaspekt
Tragbare Roboterwerkzeuge für den Einsatz in der industriellen Produktion werden zum am schnellsten wachsenden Bereich der kommerziellen Nutzung der Exoskeletttechnologie.
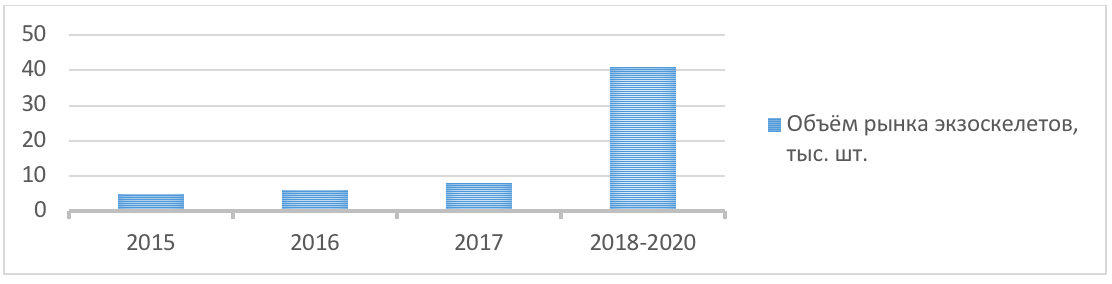 Die Dynamik des globalen Exoskelettmarktes im Zeitraum von 2015 bis 2017 mit einer Prognose für 2018-2020. nach IFR
Die Dynamik des globalen Exoskelettmarktes im Zeitraum von 2015 bis 2017 mit einer Prognose für 2018-2020. nach IFR
Eine segmentierte Prognose der Entwicklung des Exoskelettmarktes bis 2023-2024. Basierend auf Untersuchungen von
Global Markets Insight und
Markets & Markets .
Exoskelette für Arbeit und Industrie können auf Baustellen, in Trockendocks, in Fabriken, Lagern und sogar in Operationssälen eingesetzt werden. Die Einführung solcher Geräte bietet die Lösung für drei wichtige Geschäftsaufgaben:
a) Steigerung der Arbeitsproduktivität und Verringerung der Komplexität manueller Produktionsvorgänge;
b) Verringerung des Volumens der Sozial- und Entschädigungszahlungen im Zusammenhang mit arbeitsbedingten Verletzungen und Berufskrankheiten von Arbeitnehmern in Produktionseinheiten;
c) Bereitstellung zusätzlicher Motivation für die Mitarbeiter, die durch die Schaffung komfortablerer Arbeitsbedingungen erreicht wird.
In der jüngsten Präsentation der Wearable Robotics Association beschrieb Dr. Joseph Hitt Exoskelette für Produktion und Bau als die „niedrig hängenden Früchte“ des Exoskelettmarktes, was durchaus zutrifft, da es im Vergleich zu Rehabilitations- oder militärischen Exoskeletten eine Reihe von Bereichen wie industrielle Kraftanzüge gibt wesentliche Vorteile:
a) Der Verbraucherkreis ist extrem groß und nicht auf eine bestimmte Gruppe potenzieller Käufer beschränkt. Zu den Zielgruppen gehören außerdem viele der größten produzierenden Unternehmen mit hoher Solvabilität, die in Zukunft Millionen industrieller Exoskelette für ihre Arbeitnehmer kaufen können.
b) Bisher gibt es in dieser Nische noch keine klaren Führer und allgemein anerkannten Autoritäten.
c) es gibt keine administrativen und rechtlichen Hindernisse für den Markteintritt;
d) geringere Leistungsanforderungen (im Vergleich zum Beispiel mit ähnlichen militärischen Lösungen), das Fehlen von Einschränkungen im Zusammenhang mit der verwendeten Komponentenbasis, was zu niedrigeren Kosten sowohl für die Entwicklung als auch für die Herstellung führt.
Grund Nr. 2: Der soziale Aspekt
Selbst in modernen High-Tech-Fertigungsunternehmen gibt es im Rahmen der Produktionsprozesse viele Vorgänge, die sich nur schwer automatisieren lassen. Laut der Europäischen Stiftung zur Verbesserung der Lebens- und Arbeitsbedingungen verbringen bis zu 64% der hochqualifizierten Arbeitskräfte fast drei Viertel ihrer Arbeitszeit mit dem Heben und Tragen verschiedener Güter. Produktionsspezialisten müssen ständig auf Handarbeit zurückgreifen, wodurch sie schädlichen Faktoren ausgesetzt sind, die die Wahrscheinlichkeit von Verletzungen erhöhen, vor allem der Entwicklung verschiedener Arten von Erkrankungen des Bewegungsapparates, die nach wie vor zu den häufigsten Berufskrankheiten in der Europäischen Union gehören. Dies führt wiederum zu einem Anstieg der Kosten für die Aufrechterhaltung der Arbeitnehmer in Zeiten ihrer Behinderung und zu einem Rückgang der Arbeitsproduktivität im gesamten Unternehmen. Nach Angaben der Arbeitsstiftung leiden heute rund 44 Millionen EU-Arbeitnehmer an muskuloskelettalen Anomalien, die insgesamt Verluste für die europäische Wirtschaft verursachen, die auf über 240 Milliarden Euro geschätzt werden. Und das sind nur EU-Länder. [
Van der Vorm, Johan; O`Sullivan, Leonard; Nugent, Rachel; de Looze, Michiel. Überlegungen zur Entwicklung von Sicherheitsstandards für industrielle Exoskelette .
Grund Nr. 3: der technologische Aspekt
Industrielle Exosuits reagieren viel weniger empfindlich auf die technologischen Einschränkungen, die für die gesamte Exoskelettindustrie charakteristisch sind.
a) Im Gegensatz zu militärischen Exoskeletten, die für den Einsatz vor Ort und im Marsch unter Bedingungen vollständiger Energieautonomie vorgesehen sind, sind industrielle Exoskelette hauptsächlich für den Einsatz in Werkstätten, Lagern, Produktionslinien usw. vorgesehen. Aufgrund dessen werden die Anforderungen an autonome Energiequellen, die die aktiven Antriebseinheiten von Exosuits versorgen, verringert, und aufgrund der Verfügbarkeit von Stromnetzen verschwindet der Bedarf an Batterien und Erzeugungssystemen aller Art für eine Stunde. Dies gilt insbesondere für Exoskelette mit hydraulischem Antrieb, z vermeidet die Notwendigkeit, mobile Ölstationen direkt auf dem Exoskelettgehäuse zu platzieren, was wiederum eine Reihe von damit verbundenen Schwierigkeiten beseitigt.
b) Die Anforderungen an ein Steuerungssystem für ein industrielles Exoskelett sind erheblich niedriger als für eine ähnliche Lösung für medizinische oder militärische Zwecke. Ein Exoskelett-Bediener ist einerseits eine leistungsfähige Person, was bedeutet, dass er bei seiner Arbeit mit „traditionellen“ Organen und Steuerschnittstellen wie Joysticks, Touchpads, Sprachschnittstelle und anderen technische Werkzeuge verwenden kann, was er nicht kompliziert zu erlernen, teuer und teuer macht High-Tech-Schnittstellenlösungen wie beispielsweise eine Neurocomputer-Schnittstelle. Andererseits ist die Geschwindigkeit und Genauigkeit der Reaktionen auf die Kontrollwirkung in einem industriellen Exoskelett nicht so kritisch wie in einem militärischen Exoskelett, da unter Feindseligkeitsbedingungen eine Verzögerung von zwei bis drei Zehntelsekunden eine Rückkopplung des Bedieners einfach das Leben kosten kann. Die Bedingungen für die Verwendung industrieller Exoskelette sind meist nicht so kritisch.
Es sollte beachtet werden, dass die vorherigen Punkte Sie nicht irreführen sollten: Die Probleme der Energie, des effizienten ergonomischen Managements und der sicheren Verwendung sind die Eckpfeiler der gesamten Exoskelettindustrie, und industrielle Exoskelette sind keineswegs eine Ausnahme, wir sagen nur, dass das Niveau der Anforderungen Diese technologischen Aspekte können in diesem speziellen Fall erheblich geringer sein, was natürlich unter anderem von den Bedingungen und Besonderheiten der Anwendung abhängt.
Klassifizierung industrieller Exoskelette
Industrielle Exoskelette können aufgrund ihres Designs in Exoskelette des Ober- oder Unterkörpers sowie in Exoskelette in voller Größe unterteilt werden.
Aufgrund der Art des Kraftaufpralls auf Passiv (in solchen Fällen nicht mit Antriebslösungen ausgestattet, erfolgt die Unterstützung und Entlastung in solchen Fällen durch die Verwendung verschiedener Arten von Dämpfern, Federn, Unwuchten usw.) und Aktiv, die wiederum je nach Art der verwendeten in Untergruppen unterteilt werden können Antriebslösungen (elektromechanisch, hydraulisch, pneumatisch, kombiniert).
Aktive Exoskelette können je nach Struktur des Energieversorgungssystems auch in autonome und nicht autonome unterteilt werden.
Exoskelettkomplexe für Arbeit und Industrie lassen sich je nach Verwendungszweck in
6 Kategorien einteilen :
- Exoskelette zum Halten des Werkzeugs: Diese Exoskelette bestehen aus einer federbelasteten Schulter, einem mechanischen Hebel, an dem das Arbeitswerkzeug montiert ist. Der Hebel ist mit dem Exoskelettmodul des Unterkörpers und dem Gegengewichtssystem verbunden, während das Gewicht des Instruments auf den Boden übertragen wird. Exoskelette dieses Typs sind größtenteils passiv, es gibt jedoch ähnliche Lösungen mit Antrieben am unteren Rand
.
Exoskelett "Fortis", Lockheed Martin, USA - Stühle ohne Stuhl: Dies sind leichte Exoskelette, die in der für den Bediener bequemsten Position befestigt werden können, wodurch die Ermüdung und Ermüdung des Arbeiters bei längerer Arbeit in aufrechter oder nur statischer Position (z. B. in der halb hockenden Position) verringert wird.
- Exoskelette zur Unterstützung des Rückens: Diese Exoskelette können beim Kippen und Heben die richtige Haltung beibehalten und die Rücken- und Wirbelsäulenmuskulatur entlasten.
Exoskeleton BackX, ExoBionicks, USA - Exo-Handschuhe: Mechanisierte Handschuhe, mit denen Arbeiter ihre schweren Handwerkzeuge festhalten können. Es gibt auch rückwärts wirkende Geräte, die Arbeitern, die physiologische Probleme mit der natürlichen Öffnung der Handfläche haben, helfen, ihre Finger mit einem Exoskeletthandschuh zu öffnen.
Exon Handschuh Carbonhand - Exosuits in voller Größe: Vor einigen Jahren wurde angenommen, dass schwere Exosuits in voller Größe zur Lösung von Produktionsproblemen verwendet werden. Jetzt haben die meisten Entwickler auf kompaktere, hochspezialisierte Lösungen umgestellt. Projekte mit schweren Exoskeletten in voller Größe entwickeln sich jedoch weiter.
Exoskelett in voller Größe Sarcos Guardium XO, Sarcos Corp., USA - Robotermodule, die den Menschen ergänzen: Exoskelettmodule, die dem Arbeiter ein zweites Paar Hände geben. Zwei oder mehr am Bediener montierte Roboterarme, die am Körper montiert sind, werden verwendet, um Werkzeuge oder Werkstücke an Ort und Stelle zu halten.
Supernumerary Robotics Limbs Concept, MIT Wer entwirft oder fertigt heute industrielle Exoskelette?SüdkoreaDaewoo Shipbuilding & Marine Engineering
Hyundai Motor Company
Die USASarcos / Raytheon
Lockheed Martin
US-Bionicks
Ekso Bionics Holdings, Inc.
JapanPanasonic - Activelink
Cyberdine
Honda
Mitsubishi Schwerindustrie
FrankreichGobio Roboter
NeuseelandLaevo
SchweizNoonee AG
IsraelRotbot-Systeme
RusslandExochair
Der Text wurde von Albert Efimov und Igor Orlov vom Sberbank Robotics Laboratory erstellt.