In diesem Video spricht Marc Raibert, der Gründer von Boston Dynamics, über Roboter: BigDog, Spot, SpotMini, Atlas. Basierend auf diesem Video und anderen Videos, in denen Marc auftrat, werde ich kurz Robotertechnologien und zukünftige Pläne des Unternehmens beschreiben.
Marc Raibert hat Boston Dynamics vor 25 Jahren gegründet, aber sie hat ihre Roboter noch nicht in Produktion genommen. Der Gründer erklärt dies damit, dass das Unternehmen die ganze Zeit an einer schnelleren Entwicklung gearbeitet hat, die über den Horizont der Fähigkeiten der aktuellen Robotik hinausgeht. Trotzdem erreichte das Unternehmen mit seinen Robotern das Niveau, als es möglich wurde, einen kleinen elektrischen Roboter mit vier Beinen herzustellen, der sich unabhängig in unebenem Gelände und Gebäuden bewegen kann. Daher werden sie Mitte 2019 mit der Massenproduktion des SpotMini-Roboters in Höhe von 1000 Stück pro Jahr beginnen.
Derzeit werden 10 Roboter von potenziellen Kunden getestet, weitere 100 werden innerhalb eines Jahres zum Testen ausgeliefert.
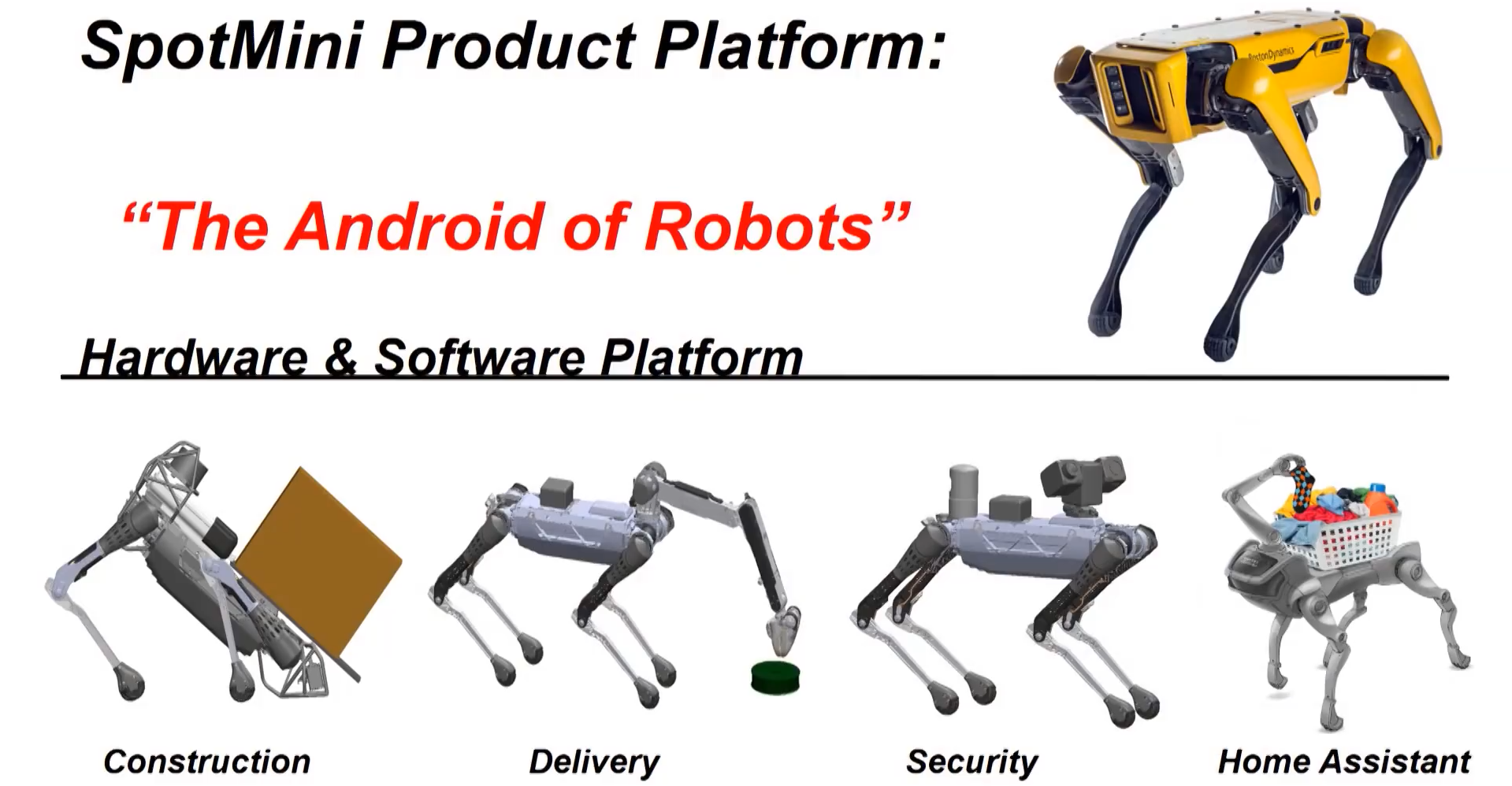
Der Roboter wird als Plattform verkauft, auf der Sie Ihre Hand installieren können. Es verfügt über eine API, mit der Entwickler von Drittanbietern ihre Anwendungen schreiben und die Grundfunktionen des Roboters nutzen können. Das Video enthält mehrere Demos solcher Anwendungen.
Es versteht sich, dass Boston Dinamics die Grundfunktionalität in den Roboter gelegt hat und nur hochrangige Befehle, wie z. B. mit einer solchen Geschwindigkeit dorthin zu gehen, dem Roboterbetreiber oder einem Drittentwickler gegeben werden können, der eine Dose Cola einreicht.
Marc behauptet, dass der Roboter neben einer Person agieren kann und im Wesentlichen kollaborativ ist, was er im Video so begründet, dass der Roboter nur 27 Kilogramm wiegt und daher dem Menschen keinen Schaden zufügen kann.

SpotMini kann eine Dose Cola erkennen, sie greifen und an einen anderen Ort bringen oder an andere weitergeben. Das Foto oben ist nur ein Beispiel für eine Anwendung für einen Roboter, der eine solche Aufgabe ausführt.
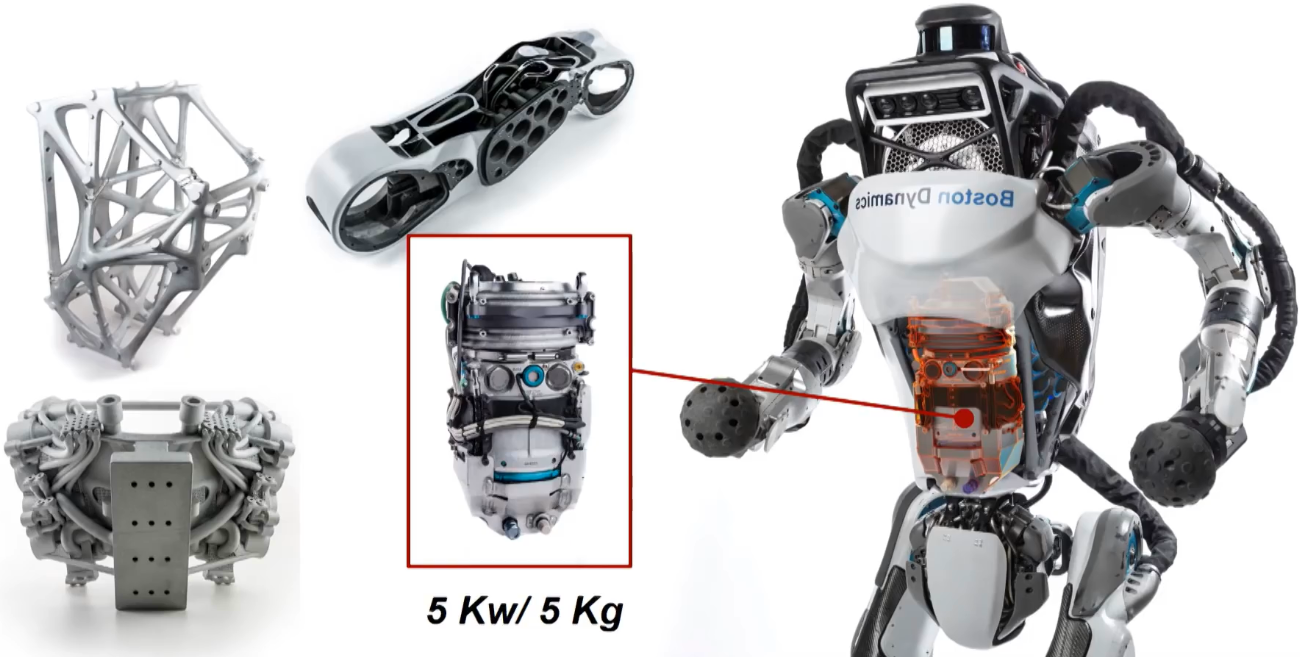
Interessant ist auch die Geschichte über die im Atlas-Roboter verwendeten Technologien. Das Anfangsgewicht des Roboters wurde bei gleichem Leistungsverhältnis von 170 Kilogramm auf 75 Kilogramm reduziert. Gleichzeitig ist der Roboter viel agiler und leistungsfähiger geworden. Dies wurde durch neue Entwurfsmethoden und 3D-Druck erreicht. Das Video zeigt ein auf einem Drucker gedrucktes Roboterbein, das bei gleicher Stärke um ein Vielfaches weniger wiegt.
Besonders erwähnenswert ist das Kraftwerk. In dem Video sagt Marc, dass sie es geschafft haben, hinein zu passen: ein Motor, eine Pumpe, ein Filter, ein Verteiler und ein Wärmemantel mit einer Batterie im Magen des Roboters, während das Gewicht der gesamten Struktur 5 Kilogramm bei einer Leistung von 5 Kilowatt betrug. Wieder sagt er, dass dies ohne fortschrittliche Designtechniken und 3D-Druck nicht möglich gewesen wäre.


In einem anderen Video spricht er über den Griffroboter, der als Logistikroboter geplant ist, der Lasten schnell über große Entfernungen transportieren kann, da er anstelle von Beinen Räder hat.
Ein kleines Reverse Engineering von mir:
In dem Video sagt Marc Raibert, dass der Roboter 5 Kameramodule verwendet, zwei vorne und eines links, rechts und hinten. Sie lehnten offenbar das Laser-Lidar in der kommerziellen Version ab. Das Foto zeigt, dass das Kameramodul irgendwie nicht dem Standard entspricht. Insgesamt können Sie 5 Kameras im Modul sehen, möglicherweise sind mehrere davon eine Infrarotkamera mit einem Empfänger. Es ist auch zu sehen, dass die beiden Kameras klein sind und scheinbar in einem Winkel zueinander stehen. Wenn jemand weiß, was dieses Modul ist, schreiben Sie in die Kommentare. Aus all dem können wir schließen, dass der Roboter nur mit Stereokameras arbeiten kann, möglicherweise mit einer Infrarot-Tiefenkamera. Der Positionierungs- und Lokalisierungsalgorithmus ist höchstwahrscheinlich ein visueller SLAM, der nicht klar ist. Im Allgemeinen ist das Unternehmen Boston Dinamics eher geschlossen und spricht nicht viel über die Software seiner Roboter, aber in den Foren schreiben die Leute, die daran arbeiten, dass sie ihren eigenen proprietären Code haben, hauptsächlich in C ++ und ein wenig in Python. Es wird die Verwendung von Drake erwähnt. Vielleicht wurde ROS im Atlas-Roboter teilweise in Wettbewerben eingesetzt.
Marc Raibert forscht seit seiner Gründung des Fußbewegungslabors im Jahr 1980 und dem Schreiben des Buches Legged Robots that Balance im Jahr 1986 in der Mechanik und Berechnung der Bewegung von Robotergliedern. Aus den MIT-Studien, die ich in einem früheren Artikel über den blinden Gepardenroboter beschrieben habe, können wir auch schließen, dass ähnliche Methoden auch in SpotMini verwendet werden, da Marc Raibert Professor am MIT war.
Tatsächlich wird es der erste ausreichend funktionierende und komplexe Roboter sein, der täglich neben einer Person eingesetzt wird. Er kann zwar nur eine Dose Cola und Frauentaschen nehmen, wird es aber trotzdem geben :)