
Derzeit arbeiten viele Unternehmen an der Entwicklung eigener Robomobile oder Autopilotsysteme für Autos anderer Unternehmen. Leider gibt es noch keinen einzigen Entwicklungsstandard, was zu Meinungsverschiedenheiten zwischen den Entwicklern selbst und den Regulierungsbehörden führt. Zumindest in den USA.
Um herauszufinden, wie effizient Autopiloten der zweiten Ebene verschiedener Automobilunternehmen arbeiten, führte die gemeinnützige Organisation Insurance Institute for Highway Safety (IIHS) eine
groß angelegte Studie mit fünf Modellen von Autopiloten verschiedener Unternehmen durch.
Bevor Sie sich mit den Details des Berichts dieser Studie befassen, sollten Sie sich daran erinnern, wie viele Autopilot-Autonomieebenen es gibt und nach welchem Prinzip eine Unterteilung in diese Ebenen erfolgt.
Es gibt also
nur fünf davon :
- Nullpegel. Der Fahrer steuert alles - das Bremssystem, Multimedia, den Kurs des Autos, die Geschwindigkeit usw. Die Maschine kann nichts alleine machen - es ist einfach nicht im Design vorgesehen.
- Erste Ebene. Habe schon etwas Automatisierung. Der Fahrer fährt das Auto selbst, aber das Auto kann einige Funktionen auf ein Minimum reduzieren. Dies ist zum Beispiel ein Satz von Geschwindigkeit oder das Halten des Autos.
- Die zweite Ebene. Es gibt bereits mehr Autopilotfreiheit. Das Auto kann sowohl den Kurs halten als auch beschleunigen, während es Informationen über die Situation rund um das Auto verwendet. Dazu werden natürlich Sensoren, Sensoren und in einigen Fällen Kameras benötigt. Der Fahrer muss seine Hände am Lenkrad des Autos halten und darf sie nicht entfernen. Die Maschine kann bei Bedarf bremsen. Die zweite Ebene kann Autopilot von Tesla zugeordnet werden. Jetzt unternimmt die Firma Ilona Mask alles, um von Level 2 auf Level 3 und 4 zu gelangen.
- Dritte Ebene. Während der Fahrt werden noch Fahrer in der Kabine benötigt, die Fahrt selbst erfolgt jedoch fast autonom. Die Maschine sammelt während der Fahrt eine große Menge an Daten über ihre Umgebung. Übrigens ist der Unterschied zwischen der zweiten und dritten Stufe des Autopiloten nicht so groß, aber die Unterschiede zwischen der dritten und vierten Stufe sind sehr groß.
- Die vierte Ebene ist ein völlig autonomes Auto. Fast alle Funktionen werden von einem Autopiloten dupliziert. Ein Auto mit einem System der vierten Ebene kann sich schnell und über große Entfernungen bewegen, ohne dass der Fahrer am Fahrprozess teilnehmen muss. Die Anwesenheit eines Bedieners wird jedoch weiterhin empfohlen. Aber er kann tun, was er will - Bücher lesen, Musik hören, schlafen usw.
- Fünfte Ebene. Autos mit Autopilot, die sich auf der fünften Ebene befinden, fahren Autos nicht schlechter und höchstwahrscheinlich besser als Fahrer - Menschen. Schwierige äußere Bedingungen (Schmutz oder Schnee, der die Markierungen bedeckt), starker Verkehr auf den Straßen usw. Beeinträchtigen Sie nicht die Fahrqualität des Autopilotsystems der fünften Ebene.
In Bezug auf den IIHS-Bericht überprüften die Mitarbeiter der Organisation nur Robomobile der Stufe 2 (Level 3.4 und noch mehr, 5 gibt es derzeit nicht, zumindest fahren solche Robomobile nicht auf öffentlichen Straßen). IIHS-Vertreter bewerteten die Situation auf öffentlichen Straßen, in die Autos mit einem automatischen Steuerungssystem verschiedener Hersteller fielen, und verglichen die Aktionen von Autopiloten.
Die "zweite Ebene" im Verständnis von IIHS stimmt mit der oben angegebenen Definition überein. Das heißt, ein Auto mit einem solchen System kann bei Bedarf und ohne Beteiligung des Fahrers verlangsamen, beschleunigen und den Kurs ändern. Es ist klar, dass dieser, falls gewünscht, die Kontrolle vollständig über sich selbst übernehmen kann.
An den Tests nahmen Roboterautos wie der BMW 5er 2017 (Fahrassistent Plus), die Mercedes-Benz E-Klasse 2017 (Antriebspilot), das Tesla Model 3 (Autopilot 8.1) 2018, das Tesla Model S 2016 (Autopilot 7.1) und 2018 teil. Volvo S90 (Pilot Assist). Alle oben genannten Autopilotsysteme haben beim AEB-Test (Notbremsung) gute Noten erhalten. Darüber hinaus führten die Studienteilnehmer mehrere Tests von Autos mit Autopiloten auf Teststraßen durch - dies wurde durchgeführt, um zu überprüfen, wie sich die Systeme bei verschiedenen Hindernissen auf der Straße verhalten. Danach wurden ähnliche Tests auf speziell zugewiesenen Abschnitten öffentlicher Straßen durchgeführt.
Adaptive Geschwindigkeitsregelung und Bremsen
In den ersten Tests zeigten sich alle Autos gut - es gelang ihnen, eine Kollision mit einem stehenden Auto zu vermeiden. Die Testfahrzeuge bewegten sich mit einer Geschwindigkeit von ca. 50 km / h. Volvo-Fahrzeuge nutzten das Bremssystem sozusagen am aggressivsten. Sie hielten nicht bei jeder Gelegenheit an, aber das Bremsen wurde schnell durchgeführt, was dem Fahrer und den Passagieren gewisse Unannehmlichkeiten bereitete.
Außerdem konnten die Autos ohne Beschädigung und in einer Situation, in der ein anderer vor der Testmaschine fuhr, aussteigen. Bei den Tests wechselte das vorausfahrende Auto stark die Fahrspur, und auf der Strecke trat ein Hindernis auf. Alle Autopiloten konnten die Situation erkennen - ein Hindernis erkennen und rechtzeitig anhalten oder abbiegen. Übrigens ist diese Situation nicht nur eine Theorie - 2016 gab es einen Unfall mit einem Tesla-Elektroauto, dann bestand das Problem genau darin, dass Autopilot das Hindernis auf der Straße nicht erkannte, nachdem das Auto vor ihm die Spur gewechselt hatte.
Im Rahmen der Tests zeigte sich Tesla 3 sehr gut, Hindernisse wurden vermieden. Aber die Autopiloten anderer Autos versagten bei Tests auf einer normalen Straße - im Liegen konnten sie von Zeit zu Zeit kein stehendes Auto erkennen, das plötzlich vor dem Kurs erschien, nachdem das vorausfahrende Auto nach rechts oder links gefahren war. Aus diesem Grund empfehlen Autohersteller mit automatischer Steuerung, dass die Fahrer ihre Hände am Lenkrad halten.
Übrigens ist das Modell 3 auf seine eigene Weise „abgestürzt“ - das Auto wurde oft langsamer oder langsamer, nachdem das vorausfahrende Auto auf eine andere Fahrspur gefahren war, und es gab kein Hindernis vor ihm. In einigen Fällen entstand die Situation aufgrund des Schattens auf der Straße, der von einem Baum neben der Straße geworfen wurde. Von den 12 Fehlalarmen des Autopiloten des Elektrofahrzeugs Tesla 3 wurden sieben aus genau diesem Grund verursacht. Die Situation selbst kann nicht als gefährlich bezeichnet werden, aber wahrscheinlich würde der Fahrer mit dem Bremsen des Autos aufgrund von Schatten nicht allzu zufrieden sein. Andererseits ist in einer solchen Situation ein "positives falsches positives" besser, dh die Reaktion eines Autos auf ein imaginäres Hindernis, als ein "negatives falsches", wenn es ein Hindernis gibt, aber das Auto sieht es nicht.
Außerdem wurden fünf dieser Modelle von Robomobilen auf ihre Fähigkeit getestet, in verschiedenen Situationen (z. B. in Kurven unterschiedlicher Krümmungen) an der ausgewählten Fahrspur zu haften. In dieser Testreihe schnitt Modell 3 am besten ab. BMW, Volvo und Mercedes-Benz waren nicht immer erfolgreich.
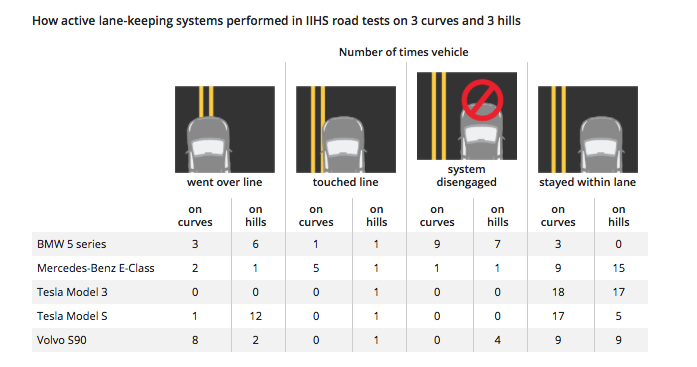
Die obige Tabelle zeigt die Ergebnisse von Tests auf öffentlichen Straßen. Wie sich herausstellte, konnte kein einziges Auto mit Autopilot außer Tesla 3 alle Tests erfolgreich bestehen. Fast jeder „Testteilnehmer“ hatte Probleme der einen oder anderen Art. Gleichzeitig sagten IIHS-Vertreter, es sei zu früh, um über eine Benutzerbewertung von Autopiloten zu sprechen, da hierfür viel mehr Tests durchgeführt werden müssten.
Dennoch werden Hersteller von Autopiloten und Autos mit ihnen immer mehr, so dass, soweit man beurteilen kann, solche Bewertungen in naher Zukunft zusammengestellt und öffentlich veröffentlicht werden. Auf der anderen Seite sind Autopiloten immer noch nicht sehr gut, so dass einige Unternehmen ihre Autopiloten „hochziehen“ müssen.
Autopiloten 3, 4 und 5 Ebenen
Alle von ihnen werden bald erscheinen. Einige Hersteller bewerben ihre Entwicklung so, als wäre es bereits ein Autopilotsystem der dritten oder vierten Ebene. Tatsächlich ist dies alles jedoch weit davon entfernt. Selbst die zweite Ebene hat, wie wir sehen, Probleme, natürlich über die nachfolgenden "Evolutionsstufen".
Wenn ein Fahrer oder Fahrer eines Autos mit automatischer Steuerung seinen digitalen Assistenten als unabhängigen Fahrer betrachtet, treten Probleme auf. Jeder hat jetzt Uber-Roboterautos auf den Lippen, von denen eines im März dieses Jahres
einen Radfahrer in vollem Gange traf, der die Straße an der falschen Stelle überquerte. Eine Untersuchung des US-amerikanischen National Transportation Safety Council ergab, dass das Problem das Autopilotsystem war, das die Person nicht rechtzeitig erkannte, und das Auto fuhr weiter.
In einigen Fällen ereignen sich keine Unfälle aufgrund eines Autopiloten, sondern einfach, weil Kollisionen in einer bestimmten Situation einfach nicht vermieden werden können. Dies geschah mit Googles Romobile, das vor einigen Jahren auf der Straße in einen Bus stieß. Der Bus führte ein falsches Manöver durch, und die Umstände erlaubten es dem Autopiloten nicht, eine Kollision mit ihm zu vermeiden.

Roboterbusse geraten ebenfalls in Unfälle und auch nicht durch die Schuld des Autopiloten. Einer dieser Busse, das Modell
Navya Arma ,
kollidierte unerwartet mit einem anderen Fahrzeug für seine Passagiere - allerdings nur, weil der Fahrer dieses Fahrzeugs auf der Straße unaufmerksam war.
Schließlich kollidierte das Tesla-Elektroauto im Januar dieses Jahres mit einem Feuerwehrauto. „Der Fahrer sagte, sein Tesla sei im Autopilot-Modus. Überraschenderweise hat der Mann keinen Schaden erlitten “,
sagte der Tweet. Das Verfahren dauerte dann lange, und es schien, dass sie nicht endlich herausfinden konnten, wer Recht hatte und wer schuld war.
Auf jeden Fall gibt es immer mehr Berichte über Unfälle mit Autopiloten - aber das liegt nicht daran, dass Autopiloten dumm werden, sondern daran, dass es immer mehr solcher Fahrzeuge gibt. Und fast alle Experten sagen, dass die „digitalen Assistenten“ der Fahrer bereits in der aktuellen Entwicklungsphase den Verkehr auf der Straße sicherer machen können. Die Entwicklung solcher Systeme steht jedoch nicht still, sondern geht weiter. Höchstwahrscheinlich werden wir in 5 Jahren auf den öffentlichen Straßen ein Massenauftritt von Systemen mit 2 und 3 Ebenen sehen.