Hallo! Dieses Gerät ist nicht nur in einem Computer-Netzteil anwendbar, sondern wir werden auch von einem Computer als dringend sprechen :)
Die Prozesstechnologie zur Herstellung von Prozessoren nimmt stetig ab, ebenso der Energieverbrauch. Prozessoren der neuesten Generationen enthalten ein grafisches Videosystem, das für alltägliche Aufgaben geeignet ist. Wenn Sie keine großen Anforderungen an die Leistung von Videospielen stellen, können Sie für ein relativ bescheidenes Budget an einen leisen Computer denken, der nur unter hoher Last Geräusche erzeugt, was nicht oft vorkommt.
Als nächstes kommt meine Vision einer Computerkonfiguration für die semi-passive Kühlung.
Die durchschnittliche CPU erzeugt auf dem Höhepunkt ihrer Last 65 Watt Wärme. Sie kann von einem Werkskühler mit einer größeren (als normalen) Leistung von 120 bis 150 Watt gekühlt werden, indem die BIOS-Einstellungen so eingestellt werden, dass sie sich nur dann dreht, wenn 30 bis 40% der CPU geladen sind oder eine Temperatur über 40 ° C aufweist.
Eine andere Geräuschquelle ist die Festplatte, aber es ist einfach, ich habe sie durch eine SSD ersetzt.
Es gab einen Netzteillüfter, der sich ständig dreht. Sie können zunächst ein vollständig passives oder semi-passives Produkt kaufen, aber hier ist der Preis für die Frage: (ab 150 USD) Vielleicht ist es sinnvoll, diese Mittel auf eine höhere Produktivität auszurichten?
Ein gewöhnliches 500-W-Netzteil (50 US-Dollar) verfügt in meinem Fall über eine enorme Gangreserve, daher habe ich beschlossen, den Lüfter vollständig auszuschalten. Bei längerem Betrieb unter starker Last begannen sich die Kühler im Inneren über 60 ° C zu erwärmen. Daher wurde beschlossen, den Lüfter zurückzugeben, aber seine Drehzahl zu regeln.
Unterschiedliche Netzteile weisen unterschiedliche Konstruktionsmerkmale auf, möglicherweise ist in einigen Fällen ein konstanter Luftstrom erforderlich. Beachten Sie daher, bevor Sie Änderungen am Design Ihres Netzteils vornehmen, dass Sie den Prozess verstehen, über genügend „gleichmäßige Hände“ verfügen und dass die vorgenommenen Änderungen den Betrieb Ihres Netzteils und der zugehörigen Geräte nicht beeinträchtigen. Es kommt häufig vor, dass das Netzteil die Luft der gesamten Systemeinheit pumpt. Änderungen können Ihren Computer beschädigen!
Die Basis wurde Arduino Nano basierend auf ATMEGA168PA aus verschiedenen Teilen der Projekte anderer Leute genommen, die ihre eigenen zusammengestellt haben.
Da die Ressourcen des Controllers dies zulassen, wurde beschlossen, eine dreifarbige LED-Anzeige vom Typ Smart LED mit verschiedenen Blinkzeichen und Farben je nach Temperatur zu erstellen.

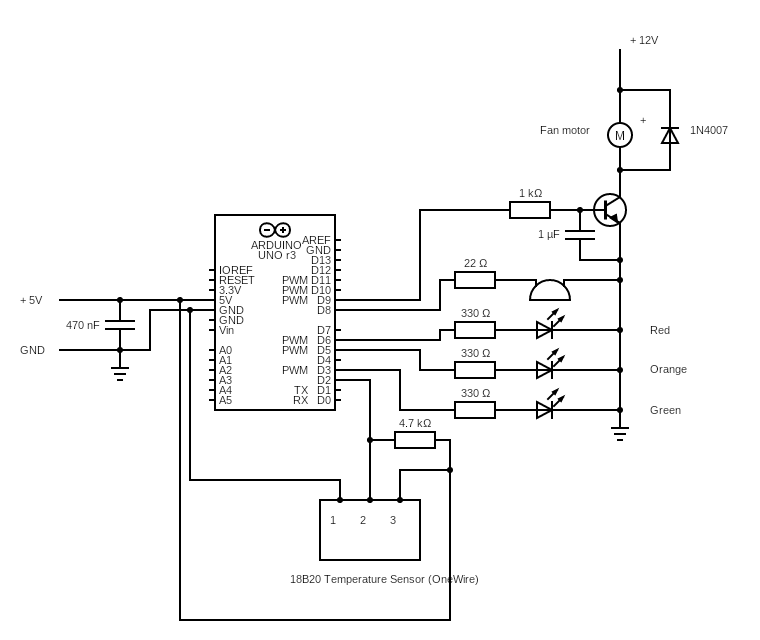
Die Temperatur wird vom DS18B20-Sensor gemessen. Je nach Temperatur steigt oder sinkt die Lüfterdrehzahl. Bei Erreichen von> 67 ° C wird der Schalldetektor aktiviert. Transistor - jeder NPN mit Strom> Strom Ihres Lüfters. Ich habe auch versucht, einen Dreileiterlüfter zu steuern, alles hat geklappt, konnte ihn aber nicht vollständig zum Stillstand bringen.
Anfangs wurde die Standard-PWM-Frequenz (448,28 Hz) verwendet, aber bei niedrigen Geschwindigkeiten klingelte der Kühler kaum, was in keiner Weise dem Konzept der leisen Kühlung entspricht. Daher wird die Softwarefrequenz der PWM auf 25 kHz erhöht. Bei den niedrigsten Umdrehungen kann der Lüfter nicht sofort starten, daher wird in den ersten zwei Sekunden ein Impuls mit maximalen Umdrehungen angelegt, dann Umdrehungen gemäß Programm.
Hier ist ein Video, das die Funktionsweise des Geräts demonstriert.
Aber eigentlich eine Skizze, ich bitte dich, nicht viel zu treten. Dies ist meine erste Skizze für Arduina :)
Klicken Sie hier, um den Code anzuzeigen.// 2 - DS18x20 data // 3 - green LED (a 330 Ohm resistor is necessary) // 5 - orange LED (a 330 Ohm resistor is necessary) // 6 - red LED (a 330 Ohm resistor is necessary) // 9 - PWM Fan // 8 - Buzzer #include <OneWire.h> byte temp; // temperature of sensor byte greenLED = 3; byte orangeLED = 5; byte redLED = 6; byte FanSpeed = 0; int piezoPin = 8; // byte modes[] = { 0B00000001, // 0B00000101, // 0B00010101, // 0.5 0B01010101, // 0B10101010, // 0B00010101, // 0B01010101 // (4 ) }; uint32_t ms, ms1 = 0, ms2 = 0, ms3 = 0, ms4 = 0, ms5 = 0; uint8_t blink_loop = 0; uint8_t blink_mode = 0; uint8_t modes_count = 0; bool FirstRun = 0; OneWire ds(2); // on pin 10 (a 4.7K resistor is necessary) void analogWrite25k(int pin, int value) { switch (pin) { case 9: OCR1A = value; break; case 10: OCR1B = value; break; default: // no other pin will work break; } } void setup(void) { pinMode(redLED, OUTPUT); pinMode(greenLED, OUTPUT); pinMode(orangeLED, OUTPUT); pinMode(9, OUTPUT); modes_count = 1; blink_mode = modes[modes_count]; TCCR1A = 0; // undo the configuration done by... TCCR1B = 0; // ...the Arduino core library TCNT1 = 0; // reset timer TCCR1A = _BV(COM1A1) // non-inverted PWM on ch. A | _BV(COM1B1) // same on ch; B | _BV(WGM11); // mode 10: ph. correct PWM, TOP = ICR1 TCCR1B = _BV(WGM13) // ditto | _BV(CS10); // prescaler = 1 ICR1 = 200; // TOP = 320 // Serial.begin(9600); } void loop() { byte i; byte present = 0; byte type_s; byte data[12]; byte addr[8]; float celsius; if ( ( ms - ms3 ) > 1000 || ms < ms3 ){ ms3 = ms; if ( !ds.search(addr)) { // Serial.println("No more addresses."); // Serial.println(); ds.reset_search(); if ( ( ms - ms4 ) > 250 || ms < ms4 ){ ms4 = ms; //delay(250); return; } } // Serial.print("ROM ="); for( i = 0; i < 8; i++) { // Serial.write(' '); // Serial.print(addr[i], HEX); } if (OneWire::crc8(addr, 7) != addr[7]) { // Serial.println("CRC is not valid!"); return; } // Serial.println(); // the first ROM byte indicates which chip switch (addr[0]) { case 0x10: Serial.println(" Chip = DS18S20"); // or old DS1820 type_s = 1; break; case 0x28: Serial.println(" Chip = DS18B20"); type_s = 0; break; case 0x22: Serial.println(" Chip = DS1822"); type_s = 0; break; default: Serial.println("Device is not a DS18x20 family device."); return; } ds.reset(); ds.select(addr); ds.write(0x44, 1); // start conversion, with parasite power on at the end } //delay(1000); // maybe 750ms is enough, maybe not // we might do a ds.depower() here, but the reset will take care of it. if ( ( ms - ms2 ) > 900 || ms < ms2 ){ ms2 = ms; present = ds.reset(); ds.select(addr); ds.write(0xBE); // Read Scratchpad for ( i = 0; i < 9; i++) { // we need 9 bytes data[i] = ds.read(); } // Convert the data to actual temperature // because the result is a 16 bit signed integer, it should // be stored to an "int16_t" type, which is always 16 bits // even when compiled on a 32 bit processor. int16_t raw = (data[1] << 8) | data[0]; if (type_s) { raw = raw << 3; // 9 bit resolution default if (data[7] == 0x10) { // "count remain" gives full 12 bit resolution raw = (raw & 0xFFF0) + 12 - data[6]; } } else { byte cfg = (data[4] & 0x60); // at lower res, the low bits are undefined, so let's zero them if (cfg == 0x00) raw = raw & ~7; // 9 bit resolution, 93.75 ms else if (cfg == 0x20) raw = raw & ~3; // 10 bit res, 187.5 ms else if (cfg == 0x40) raw = raw & ~1; // 11 bit res, 375 ms //// default is 12 bit resolution, 750 ms conversion time } celsius = (float)raw / 16.0; temp = celsius; // Serial.println("TEMPERATURE IS:"); // Serial.println(temp); } ms = millis(); // 125 if( ( ms - ms1 ) > 125|| ms < ms1 ){ ms1 = ms; // if ( temp <= 50 ) { digitalWrite(orangeLED, LOW); digitalWrite(redLED, LOW); if( blink_mode & 1<<(blink_loop&0x07) ) digitalWrite(greenLED, HIGH); else digitalWrite(greenLED, LOW); blink_loop++; if ( temp <= 40 ) { blink_mode = modes[0]; analogWrite25k ( 9, 0); FirstRun = 0; } if ( temp >= 41 && temp <= 45 ) { blink_mode = modes[1]; // Make a push impulse for starting fan (1 sec) if ( FirstRun == 0 ) { ms5 = ms; FirstRun = 1; } if (FirstRun == 1 && (2000 > (ms - ms5))) { analogWrite25k ( 9, 33); // Fan start impulse } if (FirstRun == 1 && (2000 < (ms - ms5))) { analogWrite25k ( 9, 28); // first speed } } if ( temp >= 46 && temp <= 50 && FirstRun == 1) { blink_mode = modes[2]; analogWrite25k ( 9, 29); } } if ( temp >= 51 && temp <= 61 ) { digitalWrite(greenLED, LOW); digitalWrite(redLED, LOW); if( blink_mode & 1<<(blink_loop&0x07) ) digitalWrite(orangeLED, HIGH); else digitalWrite(orangeLED, LOW); blink_loop++; if ( temp >= 51 && temp <= 54 ) { blink_mode = modes[0]; analogWrite25k ( 9, 30); } else if ( temp >= 55 && temp <= 58 ) { blink_mode = modes[1]; analogWrite25k ( 9, 31); } else if ( temp >= 59 && temp <= 61) { blink_mode = modes[2]; analogWrite25k ( 9, 32); } } if ( temp >= 62 && temp <= 120 ) { digitalWrite(greenLED, LOW); digitalWrite(orangeLED, LOW); if( blink_mode & 1<<(blink_loop&0x07) ) digitalWrite(redLED, HIGH); else digitalWrite(redLED, LOW); blink_loop++; if ( temp >= 62 && temp <= 66 ) { blink_mode = modes[0]; analogWrite25k ( 9, 33); } if ( temp >= 67 && temp <= 70 ) { blink_mode = modes[1]; analogWrite25k ( 9, 34); } if ( temp >= 71 && temp <= 120) { blink_mode = modes[2]; analogWrite25k ( 9, 50); tone(piezoPin, 2500, 30); } } } }