Der Entwicklungsprozess eines Serviceroboters auf Orangepi Zero und Arduino zum Sammeln von Golfbällen. Der ganze Schmerz eines Indie-Entwicklers, der nicht mit einem technischen Hintergrund in einem Beitrag belastet ist ...
MVP-Entwicklung. Video testen.
Was ist Golf?
Golf ist ein Sportspiel. Das Hauptziel ist es, den Ball für weniger Schläge in das Loch in jedem Feld zu rollen und alle Felder für weniger Schläge zu passieren. In unserem Land ist Golf extrem schlecht entwickelt und es ist traurig. Das Spiel ist sehr interessant, es ermöglicht Menschen, Zeit im Freien zu verbringen, während des Spiels zu kommunizieren, geeignet für alle Altersgruppen. Das Spiel hat eine klare Messung Ihres Handicap-Erfolgs - ein numerischer Indikator für die Qualifikation eines Athleten. All diese Faktoren machen Golf zu einer Streaming-Aktivität. Wenn Sie noch nicht Golf gespielt haben, ist es Zeit!

Was ist eine Driving Range?
Um vom ersten Mal bis zum Ende des Feldes näher am Loch zu schlagen, müssen Sie in der Lage sein, lange und genaue Schläge auszuführen. Die Driving Range ist ein Trainingsfeld zum Üben langer und mittlerer Golfschläge. Diese Felder sehen ungefähr so aus.

Ich bin auf der Driving Range. Dies ist ein Beispiel dafür, wie man falsch zuschlägt.

In einer Trainingseinheit auf einem solchen Feld machen sie normalerweise mehr als hundert Treffer. Die Hände, um diese Bälle zu sammeln, waren mühsam und lebensbedrohlich. Zu Beginn des 20. Jahrhunderts gab es nicht viel Auswahl, aber an einigen Orten ist Handarbeit jetzt billiger.

Ein Handwerkzeug wird noch verwendet, dies ist jedoch eher die Ausnahme.
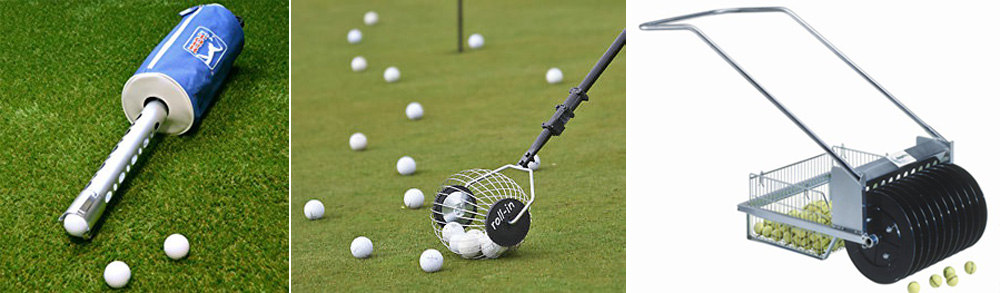
Meistens werden Bälle mit einer speziellen Anhängerkupplung an einem Traktor, einem Golfwagen oder einem normalen Auto gesammelt.

Um die Bälle zu sammeln, ziehen Sie sie in die Waschmaschine. Das Laden in den Spender ist normalerweise eine besondere Person im Staat, obwohl der Graswächter auch diese Rolle spielen kann. (Graskipper ist die Person, die für die Qualität des Rasens auf den Golfplätzen verantwortlich ist).
Die Entwicklung und Implementierung eines Serviceroboters zum Sammeln von Golfbällen scheint aus wirtschaftlicher Sicht ein vernünftiger Schritt zu sein, da dadurch die Wartung der Spezialausrüstung und das Gehalt des Mitarbeiters, der diesen Prozess durchführen sollte, eingespart werden. Golf wird auf der ganzen Welt entwickelt, dieses Foto zeigt dies deutlich.
Dieses Spiel war besonders in den USA und in Europa verbreitet, wo das Gehaltsniveau ziemlich hoch ist und sich die Möglichkeit, einen Mitarbeiter durch einen Serviceroboter zu ersetzen, sehr schnell auszahlt.
Eine Lösung finden
Als Ergebnis der Suche wurden gefunden:
ein paar DIY-Projekte

ein paar schöne Renderings
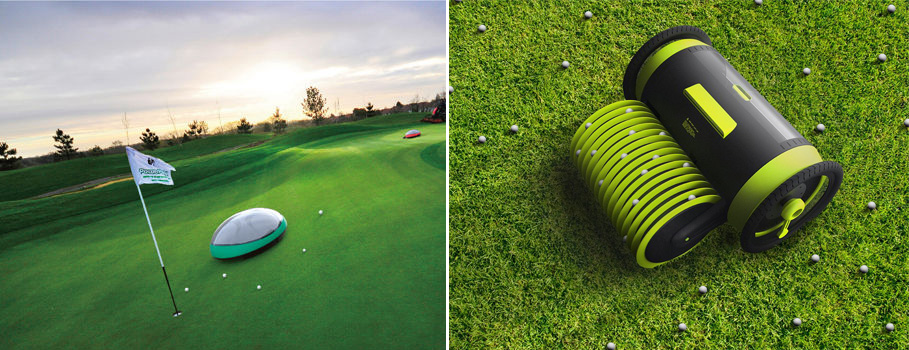
und eines ziemlich kommerziellen Projekts

Daraus können wir schließen, dass Interesse besteht. Höchstwahrscheinlich ist es sehr riskant, in solche Nischenlösungen zu investieren. Die Kosten für die Entwicklung und Anpassung der Produktion sind hoch, einige Formen werden in mehreren Zehntausenden von Dollar erhältlich sein. Es gibt etwas mehr als 40 Golfclubs in Russland, während es viele auf der Welt gibt, allein in Deutschland gibt es mehr als 700 und insgesamt mehr als 34.000. Ein Ball Picker Roboter als Produkt wird den Zahnbürstentest bei Good Corporation definitiv nicht bestehen.
Es ist sehr seltsam, dass die Verwaltung mehrerer europäischer Golfclubs, mit denen ich gesprochen habe, nichts von der Existenz eines vorgefertigten Roboters gehört hat, obwohl sie Interesse zeigten. Alle meine Versuche, mit dieser Firma in Kontakt zu treten, waren erfolglos. Vielleicht können sie die Anzahl der bestehenden Bestellungen nicht bewältigen.
Ich weiß nicht genau, was daraus werden wird. Vielleicht wird irgendwo auf dem Weg von der Sperrholzkiste zur ersten „erwachsenen“ Probe verstanden, ob jemand sie braucht oder nicht.
Das ursprüngliche Ziel ist es, eine Arbeitsprobe ohne Berücksichtigung des Aussehens zu erhalten. Als nächstes habe ich vor, dem Roboter ein ordentliches Aussehen zu verleihen und ihn in einem Golfclub in Russland zu testen. Fahren Sie nach dem Debuggen und Durchführen von Langzeittests mit der Verarbeitung des Modells zu einem für die Produktion geeigneten Modell fort.
Lass uns gehen!
In Bezug auf die bestehende kommerzielle Lösung sind mehrere Hauptvorteile geplant.
- Es ist nicht erforderlich, ein Niedrigstromkabel um den Umfang zu vergraben.
- Möglichkeit der Implementierung in vorhandene Infrastruktur.
- Niedrigere Kosten und Gesamtbetriebskosten.
Gehäuse und mechanisches Teil
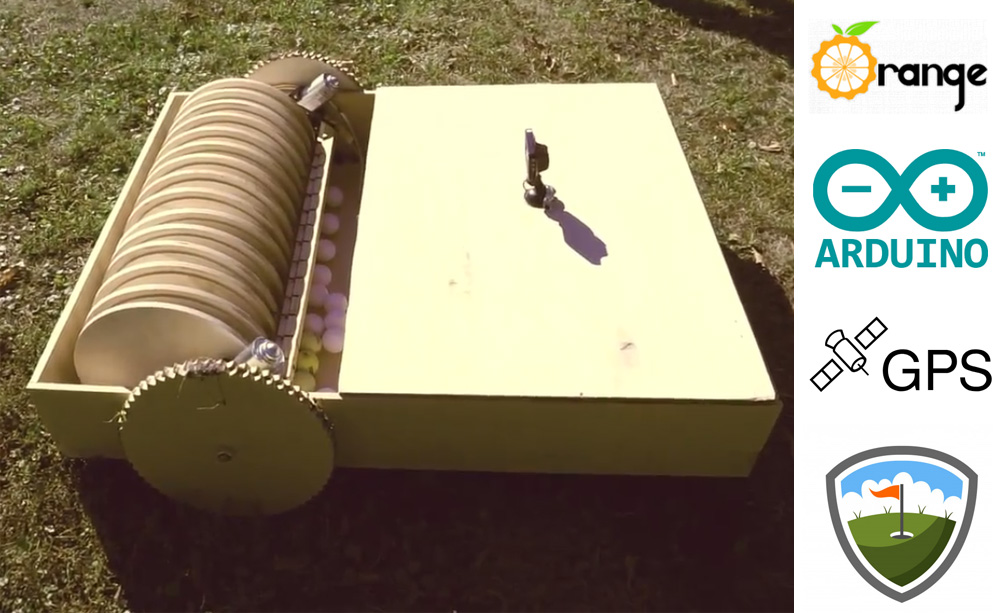
Das Material für den Körper der ersten Probe war ausgewähltes Sperrholz. Günstig, ermöglicht es Ihnen, einige Teile schnell vor Ort zu schneiden oder Löcher zu bohren. Damit alles klar eingestellt war, skizzierte ich eine Zeichnung und gab sie dem Fräsen.

Sammelte alle Details. Von Anfang an gab es eine Idee, den Körper abzurunden, aber beschlossen, strikt auf MVP zu verzichten. Alles, was die Leistung nicht beeinträchtigt, wird absichtlich von der Aufgabenliste ausgeschlossen.

Der Mechanismus zum Einfangen von Bällen während der Entwicklung dieser Geräte hat seine Wirksamkeit gezeigt, daher wurden andere Optionen nicht in Betracht gezogen.
Motor 12V 30 N / m. an jedem Rad. Der gleiche Motor dreht die Welle mit den Greifscheiben, da diese über die Oberfläche angehoben werden, um in Kurven zu investieren und die Manövrierfähigkeit zu erhöhen.

Anfangs waren die Motoren keine chinesischen Namen. Es gab keinen Moment in der Beschreibung, daher war das Risiko groß. Der Moment war eindeutig nicht genug, was nicht über die Motoren aus den Fenstern gesagt werden kann.
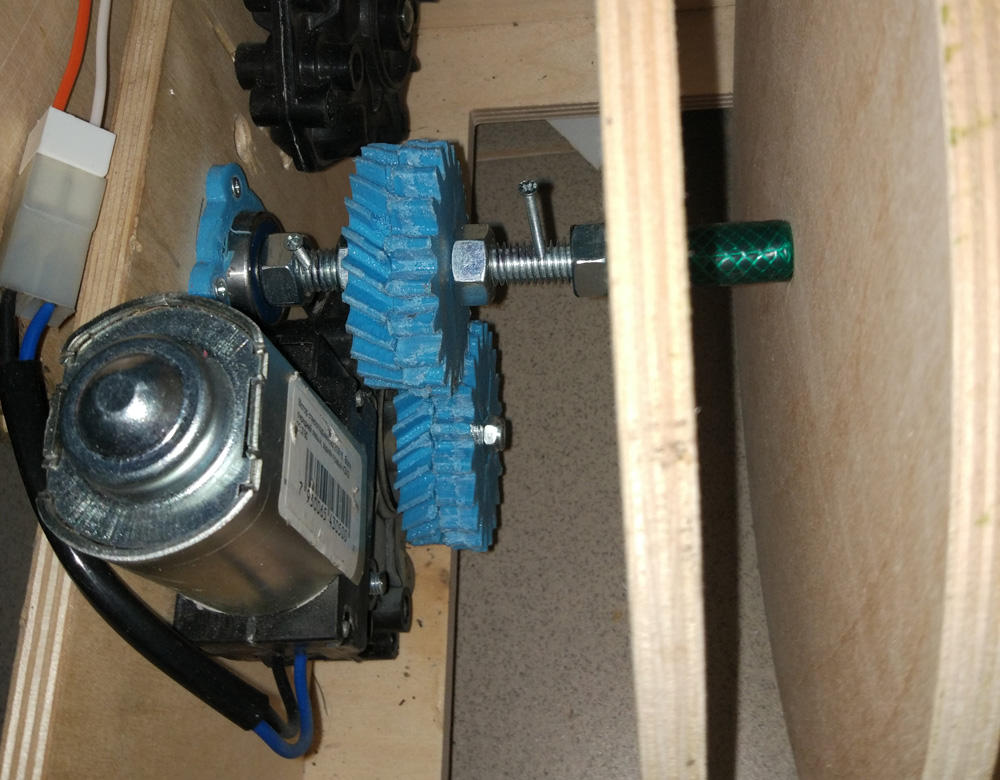
Nach dem Motorwechsel mussten andere Gänge gedruckt werden.
Elektronik
Da der Rover ohne ein elektromagnetisches Kabel entlang der Kontur des Feldes arbeiten sollte, muss er irgendwie navigieren und nach einer Basis suchen, um Bälle fallen zu lassen und aufzuladen.
Ich entschied mich für Orangepi Lite und Arduino für eine bequemere Arbeit mit 5 V ohne Zoo-Level-Konverter für jeden Sensor und Motortreiber.
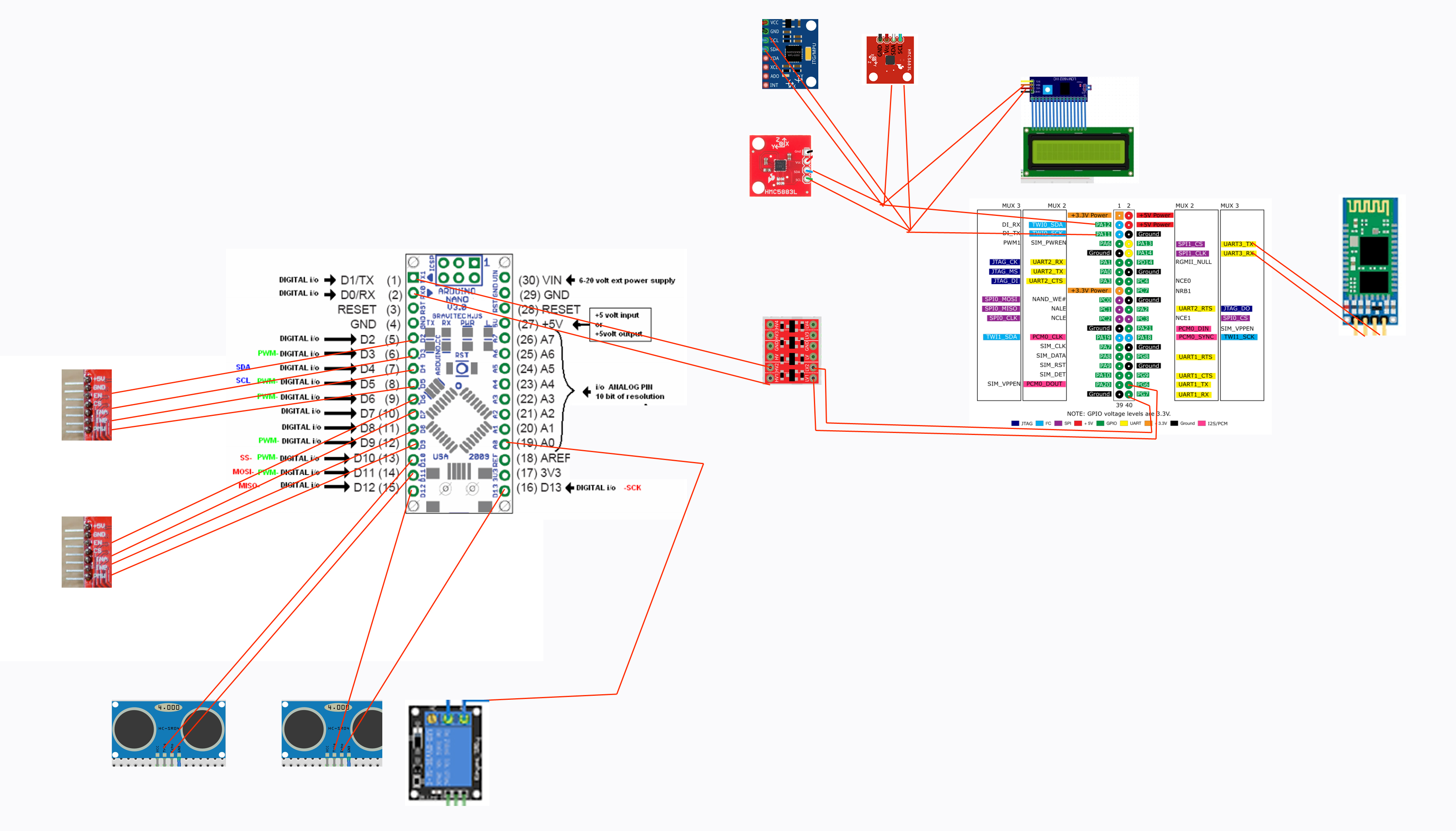
Alle fertigen Module auf dem Steckbrett zusammengebaut. Dies wirkt sich auf den Mangel an Erfahrung in der Schaltung aus. Ich denke, dass es in Zukunft kein Problem mehr sein wird, die Platine für Module oder diskrete Elemente zu trennen und zu bestellen.

Das Schema besteht aus 11 Plänen, 11 Karl!
- Orange Pi Lite
- Arduino Nano
- GPS-Modul GY-NEO6MV2
- 2 VNH2SP30-Motortreiber
- Bluetoth Hc-06
- 2 Ultraschallmodule J34
- Logikpegelwandler
- Modul 3-Achsen-Gyroskop und Beschleunigungsmesser GY-521 MPU-6050
- Block von zwei Relais
Dies geschah natürlich für die schnelle Montage, Installation und den Austausch von Modulen.
Software-Teil
Das Hauptskript ist in Python geschrieben. Im Programmzyklus gibt es ein globales Ziel:
- Initialisierung
- Bälle sammeln
- Kehre zur Basis zurück
- Aufladen
- Geplante Feiertage
- Ruhen Sie sich auf den Wetterbedingungen aus.
Initialisierung
Während der Initialisierung werden Systeme getestet, GPS durchsucht, eine lokale Cross-Country-Karte erstellt und ein weiteres Ziel festgelegt.
Bälle sammeln
Während des Sammelns von Bällen in jedem Zyklus wird die lokale Durchgängigkeitskarte aktualisiert, der Vektor auf das aktuelle geografische Ziel aufgetragen, der Überfüllungssensor mit Bällen abgefragt und die Batterie abgefragt.
Kehre zur Basis zurück
Im Falle eines Überlaufs des Abteils wegen Schwertern oder Erschöpfung der Batterie schaltet der Roboter das globale Ziel um, um auf kürzestem Weg zur Basis zurückzukehren. In unmittelbarer Nähe zu den Basiskoordinaten wird eine visuelle Suche nach der Markierung durchgeführt, entlang derer eine weitere, genauere Ausrichtung erfolgt.
Aufladen, ausruhen
Der Ladevorgang erfolgt bis zur erforderlichen Batteriespannung. Die Ruhe kann planmäßig oder durch Auslösen eines Regensensors geplant werden.
Gehäuse

Vielen Dank für das Design
habr.com/users/NikitaKhvorykDer Stützkörper muss von oben mit dem oberen Teil abgedeckt werden, der zum Schutz vor Regen und herabfallenden Bällen dient. Der erste dekorative Fall, den ich aus Glasfaser und Epoxid herstellen möchte. Ich bin bereit, einen separaten Beitrag darüber zu schreiben, wenn es interessant ist.

Video
Pläne
Der Rover sammelt bereits 95-100% der Ziele auf seinem Weg. Erstellt eine Route innerhalb des Polygons mithilfe von GPS-Koordinaten. Die Pläne:
- Suche nach einer Basis zum Abwerfen von Bällen und Aufladen auf eine visuelle Markierung.
- Servokugel zurücksetzen.
- Ballonüberlaufsensor.
- WEB-Schnittstelle zur visuellen Anzeige von Punkten auf der Karte, Aufbau von Zonen zum Sammeln von Bällen mit unterschiedlichen Intervallen.
- Körper.
- Platzierung des Roboters in einem Golfclub in Moskau für einen Test unter Kampfbedingungen.
Fragen
Viele Male nach dem Post erhielt ich von der Habro-Community Antworten auf Fragen oder Ratschläge, die mir sehr geholfen haben. Im gesamten Beitrag gibt es einige Fragen, auf die ich wirklich eine Antwort brauche. Ich beschloss, sie der Einfachheit halber zusammenzubringen.
- Wie mache ich einen Körper für den Roboter? Es sollte schön aussehen, ohne in Formen zu investieren.
- Lohnt es sich, von den Modulen wegzukommen und alles auf einer Platine zu erledigen? Was tun mit einem Mikrocomputer?
- Wie finde ich eine Finanzierung für ein Projekt? Wo kann man Proben testen?
- Ich kann nur kein Beispiel für einen Kalman-Filter für GPS-Daten mit Korrektur durch Magnetometer oder Gyroskop finden. Es gibt Pycalman, aber ich verstehe nicht, wie ich die Daten von den Sensoren in die Matrix einpassen soll. Auch auf dem Toaster fand die Antwort nicht. Ich wäre sehr dankbar.
Vielen Dank für Ihre Aufmerksamkeit. Im nächsten Beitrag ein Test unter Kampfbedingungen. Ich werde dir zeigen, was nicht gezeigt wird, ich werde versuchen, das Ungelöste zu lösen und alles Unbekannte herauszufinden!
Immer dein, ein Anfänger-Startup, der
Manager des Middle Links , der Entwickler aller Arten von Robotern
1 ,
2 ,
3 ,
4 ,
5 ,
6 und Gadget
1 ,
2 ,
3 . Und ich schrieb zwei Geschichten
1 ,
2 und nahm ein paar Interviews
1 ,
2 ,
3 .
Ich bin offen für Dialoge, Ratschläge, Hilfe und Vorschläge.