In dieser Veröffentlichung wird die Entwicklung eines einfachen Parksensors auf der Basis von Arduino erörtert.
Ein bisschen Theorie. Parktronic- oder Parkradar ist ein Gerät zur Verfolgung der Entfernung zwischen dem Auto und einem Objekt. In der Regel werden Parksensoren von der Rückseite des Autos installiert.
Trotz des Preises von ~ 1936 Rubel habe ich beschlossen, meine eigene Version dieses Geräts herzustellen. Ich beschloss, klein anzufangen und schuf wahrscheinlich die einfachsten Parksensoren aller möglichen.
Von der Theorie bis zur Praxis benötigen wir für die Montage des Geräts 3 LEDs (ich habe verschiedene Farben gewählt, es ist einfacher und visueller). Piezo-Emitter mit Generator *; Ultraschall-Entfernungsmesser HC-SR04; Ein 220-Ohm-Widerstand mit einer Leistung von 0,25 Watt (obwohl andere angemessen sind, es wird keine weitere Leistung benötigt) und Arduino eines Modells.
Montage
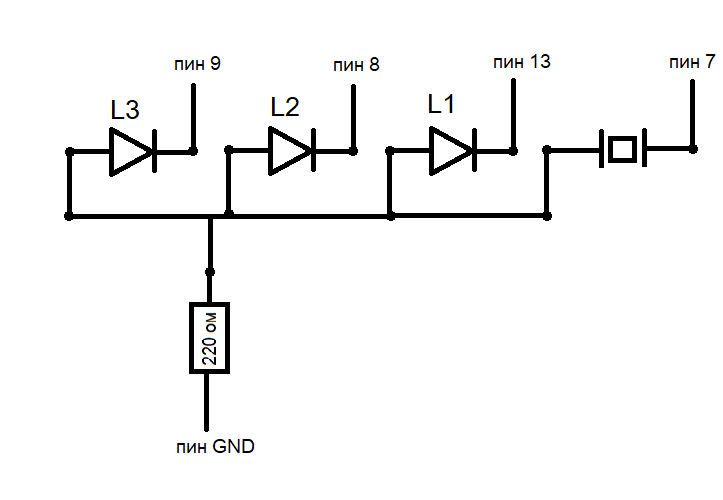
- Verbinden Sie die GND (-) LEDs und den Piezo-Emitter und verbinden Sie ihn über einen Widerstand mit dem GND-Pin.
- Wir verbinden den VCC (+) des Entfernungsmessers mit dem + 5V-Pin von Arduino, Trig bei 10, Echo bei 11 und wo ich denke, dass GND bereits klar ist.
OK, wir haben die Schaltung zusammengestellt, was kommt als nächstes? Und dann schreiben wir ein Programm für diejenigen, die nicht wissen, dass Arduino in Wiring programmiert ist. Es ist vereinfachtes C ++, es ist am einfachsten, Arduino IDE als IDE zu verwenden.
Hier ist das Programm:
int trigPin = 10; // Trig int echoPin = 11; // Echo int rLed = 12; // LED int yLed = 8; // LED int bLed = 9; // LED int buzz = 7; // void setup() { // pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); pinMode(bLed, OUTPUT); pinMode(yLed, OUTPUT); pinMode(rLed, OUTPUT); pinMode(buzz, OUTPUT); } void loop() { int duration, distance; // LOW Trig digitalWrite(trigPin, LOW); delayMicroseconds(2); // Trig digitalWrite(trigPin, HIGH); // 10 μs delayMicroseconds(10); digitalWrite(trigPin, LOW); // Echo duration = pulseIn(echoPin, HIGH); // distance = duration / 58; if (distance > 20) { // > 20 digitalWrite(bLed, HIGH); // LED digitalWrite(yLed, LOW); digitalWrite(rLed, LOW); digitalWrite(buzz, LOW); } else if (distance <= 20 && distance > 10) { // // 20 10 digitalWrite(yLed, HIGH); // LED digitalWrite(bLed, LOW); digitalWrite(rLed, LOW); digitalWrite(buzz, LOW); } else if (distance < 10) { // < 10 digitalWrite(rLed, HIGH); // LED digitalWrite(yLed, LOW); digitalWrite(bLed, LOW); digitalWrite(buzz, HIGH); // } delay(100); // 100 }
Ich habe das fertige Gerät nicht zusammengebaut, da ich derzeit am neuen
PON-2- Modell mit einer vierstelligen Sieben-Segment-Anzeige arbeite.
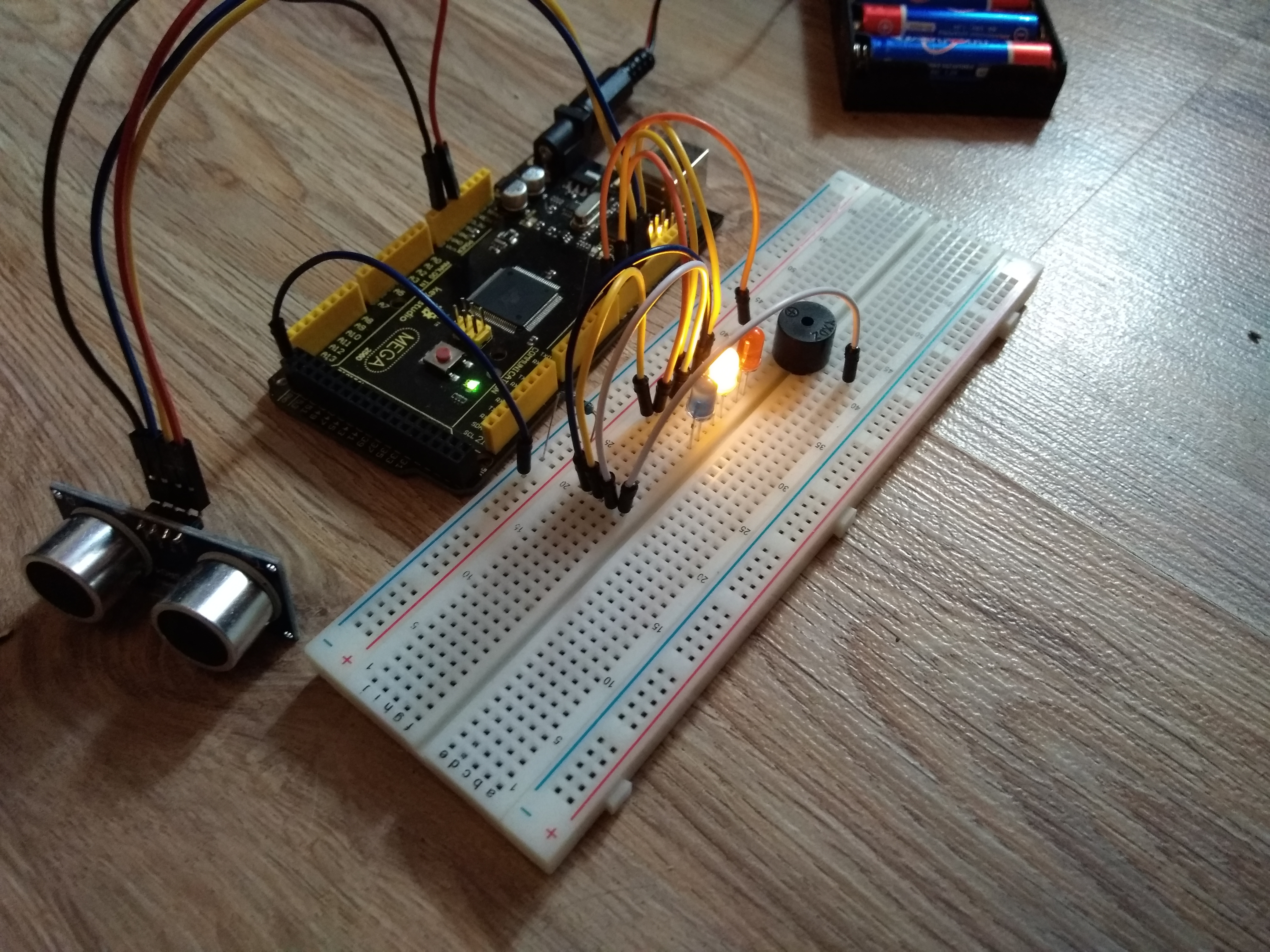
Einige Fotos, Videos und Bilder:
* Ein Piezo-Sender mit Generator sieht ungefähr so aus:

Schritt 1:
Schritt 2:

Die Bedienung des Gerätes in Bildern:


Ich habe von dieser
Website einen Programmcode und Informationen zum Entfernungsmesser HC-SR04
erhalten