
Oder ein Staubsauger mit Bluetooth-Steuerung
Im Prozess der technischen Kreativität werden nicht nur alle Arten von nützlichen und nicht sehr nützlichen Dingen erhalten, sondern auch viele verschiedene Späne, Sägemehl und anderer Müll. Und dieser Müll muss sowohl beim Sägen als auch danach entfernt werden. Im Folgenden werde ich Ihnen meine Lösung für dieses Problem erläutern und zum einen ein Fernsteuerungsprojekt für Geräte mit einem Phasenimpulsregler zeigen.
Für den Anfang habe ich einen Staubsauger gewählt, der zum Reinigen von Spänen einschließlich Metall geeignet ist. Staubsauger mit Beutel fielen sofort ab. Weil Metallspäne und andere Eisenstücke eine Papiertüte schnell zerreißen und Sie nicht alles aus einer Stofftasche schütteln. Die Wahl fiel auf einen Staubsauger mit einem Zyklonfilter (Behälter) und einem Schaumfilter danach. Das ist bequem. Sie gießen einfach die Späne aus dem Glas und waschen manchmal den Schaumgummi. Bei ihm erkannte ich das Ansaugen von Spänen an einer Handmühle direkt unter der Mühle während des Betriebs. Dies verbessert die Sichtbarkeit erheblich, verringert die Chipausdehnung und verbessert die Qualität, da der Chip den Prozess nicht stört und der darin befindliche Cutter nicht klebt. Die Steuerung des Staubsaugers erfolgte über eine Steckdose mit einem Relais, das mit dem Einschalten der Maschine synchronisiert war.
 Klickbar
KlickbarAber dann wurde es nicht genug. Und ich habe einen großen Zyklon mit einem 20-Liter-Tank gemacht.
 Klickbar
KlickbarDas ist eine coole Sache!
- Dies ist der Zyklon selbst. Es erzeugt einen Wirbelwind aus Luft und Staub / Schmutz wird durch Zentrifugalkraft in den Tank 2 abgegeben
- Der Tank muss absolut dicht sein und starke Wände haben, damit er nicht durch Vakuum zerquetscht wird. Es muss einen abnehmbaren Deckel haben, um Schmutz zu entfernen.
- Die Basis auf den Rollen erleichtert das Fahren in der Werkstatt zu verschiedenen Maschinen oder beim Reinigen.
Eine Saugquelle für den Zyklon ist ein Staubsauger. Jetzt keine. Weil der Zyklon 99% des Mülls aufnimmt und der Staubsauger sehr selten gereinigt werden muss. Der Zyklon verträgt Feinstaub, der fast keine Masse hat (z. B. Betonstaub), nicht gut, aber das ist nicht unser Fall. Ich bin kein Baumeister. Aber Sägemehl nach einer elektrischen Stichsäge ist schon in seiner Kraft und Metallspäne von selbst.
Ich habe einen Zyklon (1) in einem chinesischen Online-Shop gekauft.
Ich habe zusammen mit einem lila Pferd und einem grünen Snusmumrik aus einem bekannten Unternehmen
ein Fass giftigen Leims
aus dem Lager von Sojusmultfilm gestohlen .
Er stützte den Rollenständer alleine.
Alles scheint großartig zu sein, aber es gab ein Problem. Wenn Sie sich das Foto genau ansehen,
können Sie den alten Teppich aus dem 16. Jahrhundert sehen. Es ist zu sehen, dass die Bedienelemente des Staubsaugers am Griff verblieben sind, der am Ausgang des Zyklons festsitzt. Und der Schlauch, mit dem Sie arbeiten, ist nicht an den Staubsauger angeschlossen und steuert ihn nicht. Unbequem jedoch! Was tun? Es wird furchtbar unpraktisch sein, an den Drähten zu ziehen, Sie werden in sie verwickelt sein, Sie werden fallen und sich mit allem brechen, was möglich und unmöglich ist.
Wir müssen uns eine Funksteuerung einfallen lassen!
Zum Glück habe ich noch einen Griff vom alten zerrissenen Schlauch. Dies ist übrigens auch eine Idee für die Reparatur eines Schlauches mit einer Steuerung. Jeder Schlauch kann mitgeliefert werden und die Steuerung kann über Funk erfolgen. Die Hauptsache ist, den Griff mit der Taste zu speichern.
Ich habe auch die Idee, die Funkmodule in die Maschinen zu integrieren, wo ich die Spanabsaugung (CNC-Fräsen und konventionell) verwende und die Saugsteuerung in das Maschinenpaneel integriere. Bei CNC kann die Saugleistung programmgesteuert aus dem G-Code eingestellt werden. Und nicht an eine Steckdose mit Relais anschließen.
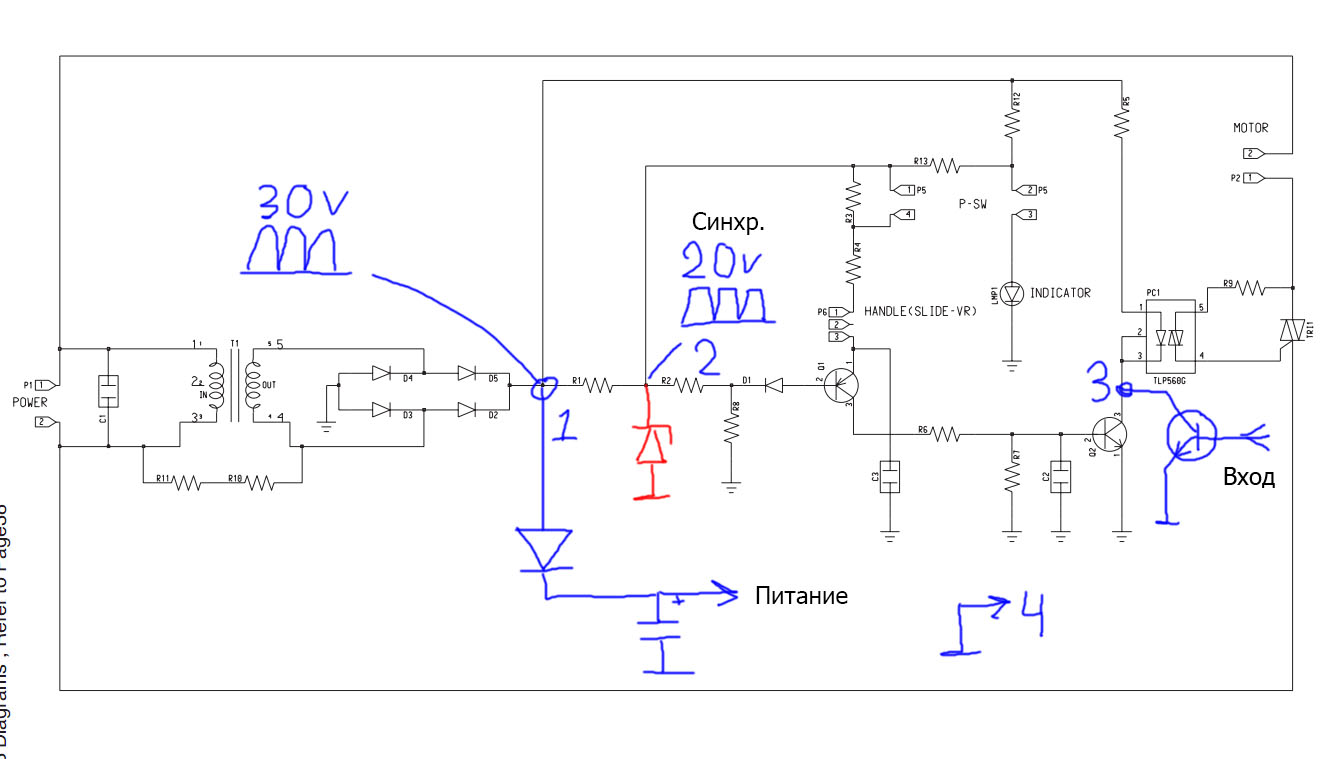
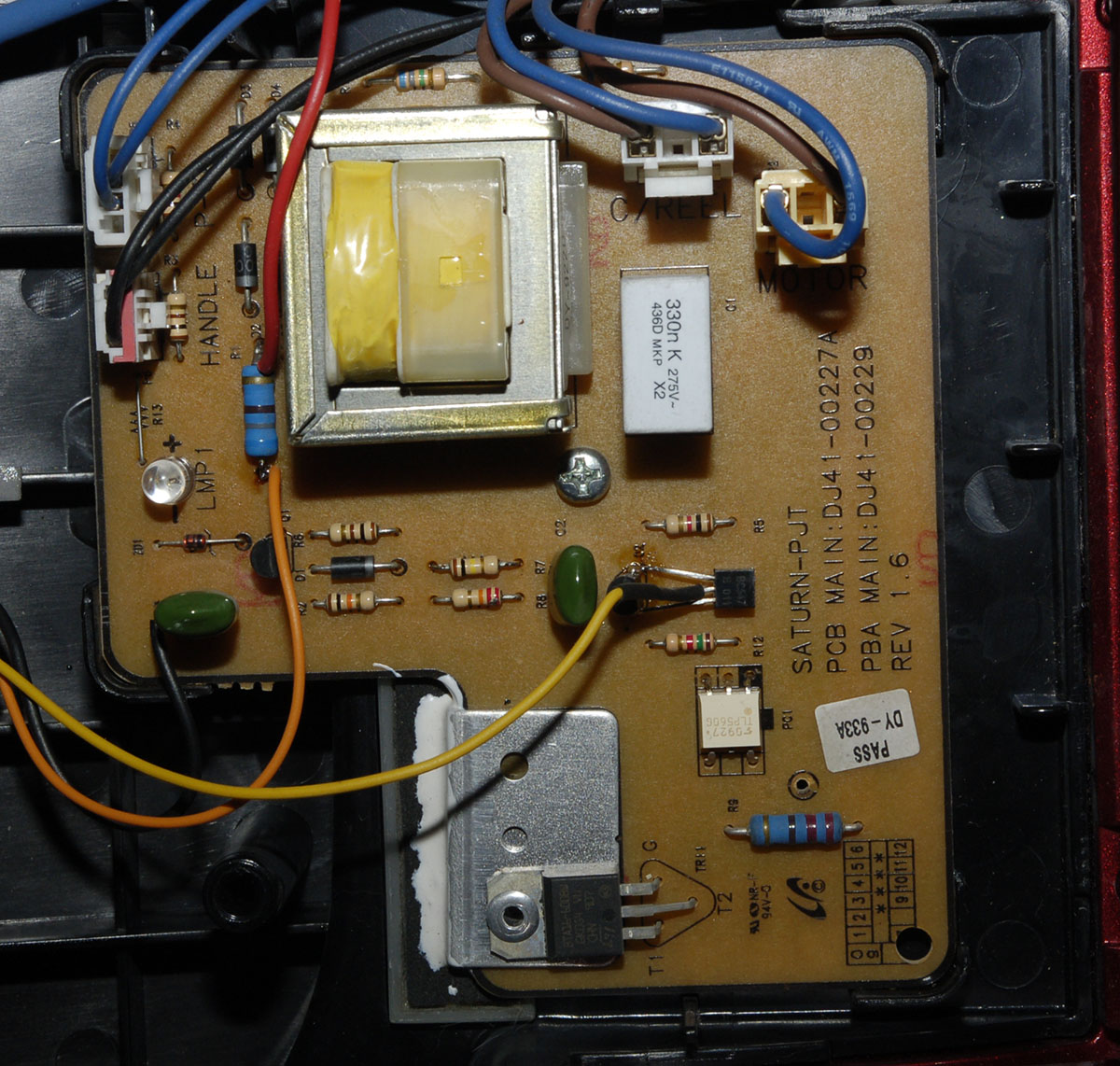
Kaum gesagt als getan. Betrachten Sie das Schema meines Samsung-Staubsaugers:
 Klickbar
KlickbarWas sehen wir hier?
Der Hersteller versorgte den Griff nicht mit 220 Volt, damit der Jugendliche nicht durch elektrischen Strom getötet wurde, und stellte einen Transformator und eine galvanische Trennung her. Es ist schön, wenn sie sich um dich kümmern. Und vom Niederspannungsteil können Sie Nahrung für das "Gehirn" nehmen. Der Motor wird über einen Triac gesteuert und dieser öffnet sich mit einem Optokoppler. Die Entwickler der roten Zenerdiodenschaltung haben es einfach vergessen :)
Ich möchte in die Schaltung einschneiden, um die native Funktionalität nicht zu ruinieren. Lassen Sie den Staubsauger wie einen normalen Haushalt arbeiten.
Wir ziehen Schlussfolgerungen:
- Wir müssen die PWM-Steuerung durchführen und sie mit dem Netzwerk synchronisieren. Nur die Spannung zu ändern oder so etwas wird nicht funktionieren.
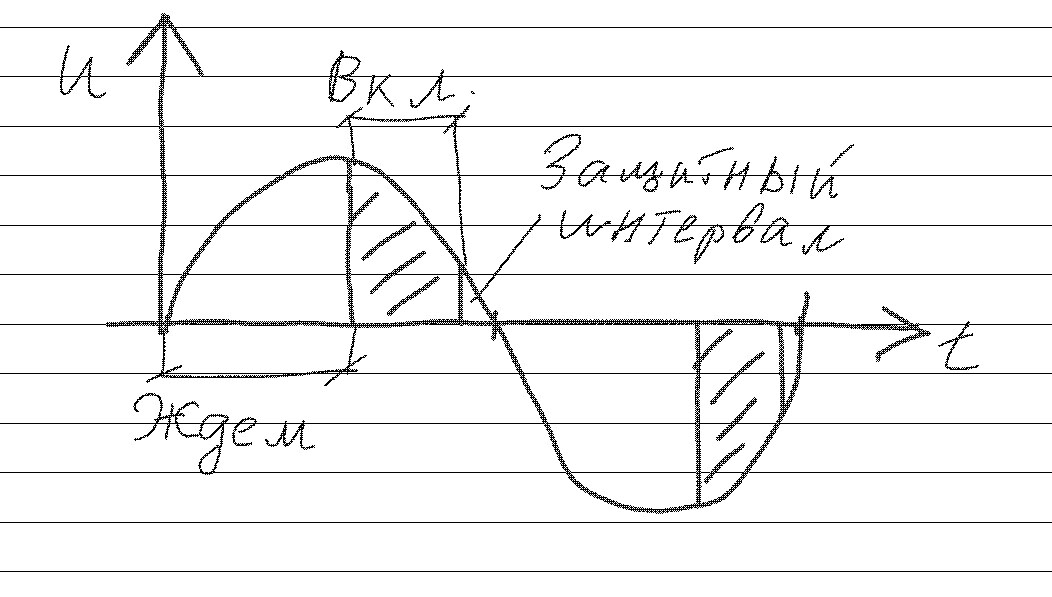
- Seit der Steuerung des Triac muss die PWM am Ende der Halbwelle der Netzspannung beginnen, damit der Triac beim Durchgang durch 0 schließt und bei Bedarf öffnet.
- Wir brauchen ein Schutzintervall, um die Beleuchtung des Optokopplers zu entfernen, bevor wir wieder durch 0 gehen, damit sich der Triac zu Beginn des nächsten Halbzyklus schließt und nicht öffnet.
- Es ist notwendig, dass der Motor garantiert anspringt und die Bürsten nicht brennen. Sie können PWM nicht mit einem Tastverhältnis von Null starten. Weil der Motor die Reibung überwinden muss und garantiert anspringt. Das minimale Tastverhältnis ist erforderlich und muss gemessen werden.
- Um das "Gehirn" mit Strom zu versorgen, muss ein gepulster Abwärtswandler verwendet werden. Die Leistung der "Gehirne" beträgt 3,3 V und die Leistung des Transformators beträgt 30 V. Es ist nicht menschlich, so viel in die Hitze abzuleiten, zumal die Trance klein ist und sich erwärmt.
Ich beschloss, auf diese Weise in die Rennstrecke zu "stürzen":
Ab Punkt 1 nehmen wir Essen. Aber durch die Diode! Weil für den Betrieb der nativen Schaltung eine Welligkeitsspannung erforderlich ist.
Ab Punkt 2 entfernen wir den Synchronisationsimpuls mit dem Netzwerk.
Bei Punkt 3 schließen wir auch einen Transistor an, mit dem wir den Optokoppler mit einem Signal von der Steuerung öffnen.
Nun, Land 4 wird uns auch nicht schaden.
 Klickbar
KlickbarDurch die Methode des wissenschaftlichen Einsteckens mit einem Oszilloskop in die Arbeitsplatte habe ich gemessen, dass das Mindestarbeitszyklus für einen zuverlässigen Motorstart 20% betragen sollte. Und das Schutzintervall vor dem Durchlaufen von 0 habe ich beschlossen, 5% der Halbwertszeit des Netzwerks zu machen, dh 0,5 Meilen Sekunden. Der Controller muss so programmiert werden, dass er ungefähr so funktioniert:
Um die Funkverbindung zu implementieren, habe ich in China solche Penny SPP Bluetooth-Module bestellt:
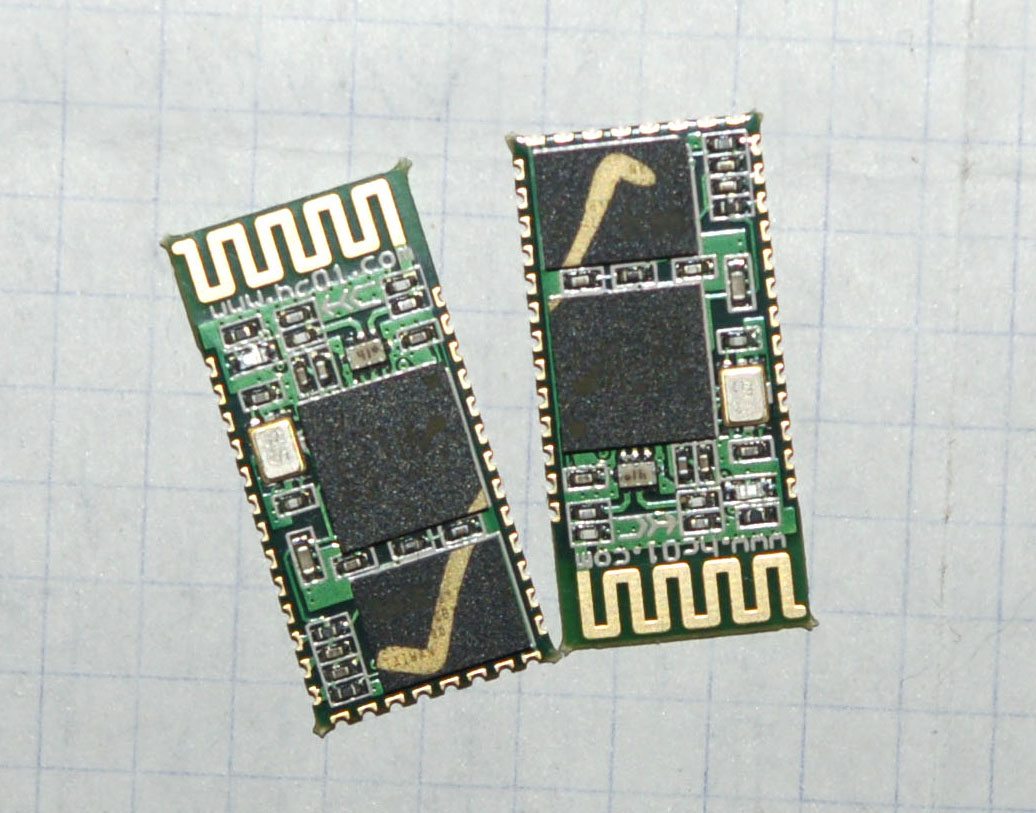
Sie heißen HC-05
Sie können sowohl vom Empfänger als auch vom Sender konfiguriert werden. Sie werden durch UART AT-Befehle konfiguriert. Der Prozess wird an vielen Stellen beschrieben. Ich denke, Sie sollten sich nicht damit befassen, und das Datenblatt für diese Module befindet sich im Netzwerk.
Ich habe dem Empfänger keine Standard-PIN zum Schutz vor Verbindungen von Drittanbietern zugewiesen, aber ich habe den Sender an eine feste Adresse des Empfängers gebunden, damit er sich mit nichts verbinden kann. Im Allgemeinen schützte er das Gerät vor perversen Bindungen :)
Die von 9600 gewählte Geschwindigkeit ist mehr als ausreichend. Mega hätte genug Verstand dafür gehabt. Module eingeschaltet, geprüft. Sie verbinden sich ohne zusätzliche Befehle und das Terminal prüft, ob Buchstaben von einem Modul zum anderen fliegen. Ich bemerkte, wer von ihnen derjenige war, der es aufschob, bis der Rest der Innereien fertig war.
Alles, ich bin es leid zu schreiben und niemand wird lange Artikel lesen.
Es ist schon Freitag! Und es ist Zeit, es zu feiern, was ich allen wünsche!
Im nächsten Teil werde ich die harte Implementierung von Empfänger und Sender zeigen und erzählen, wie ich die Leiterplatte auf dem Router gesehen habe.