Intro
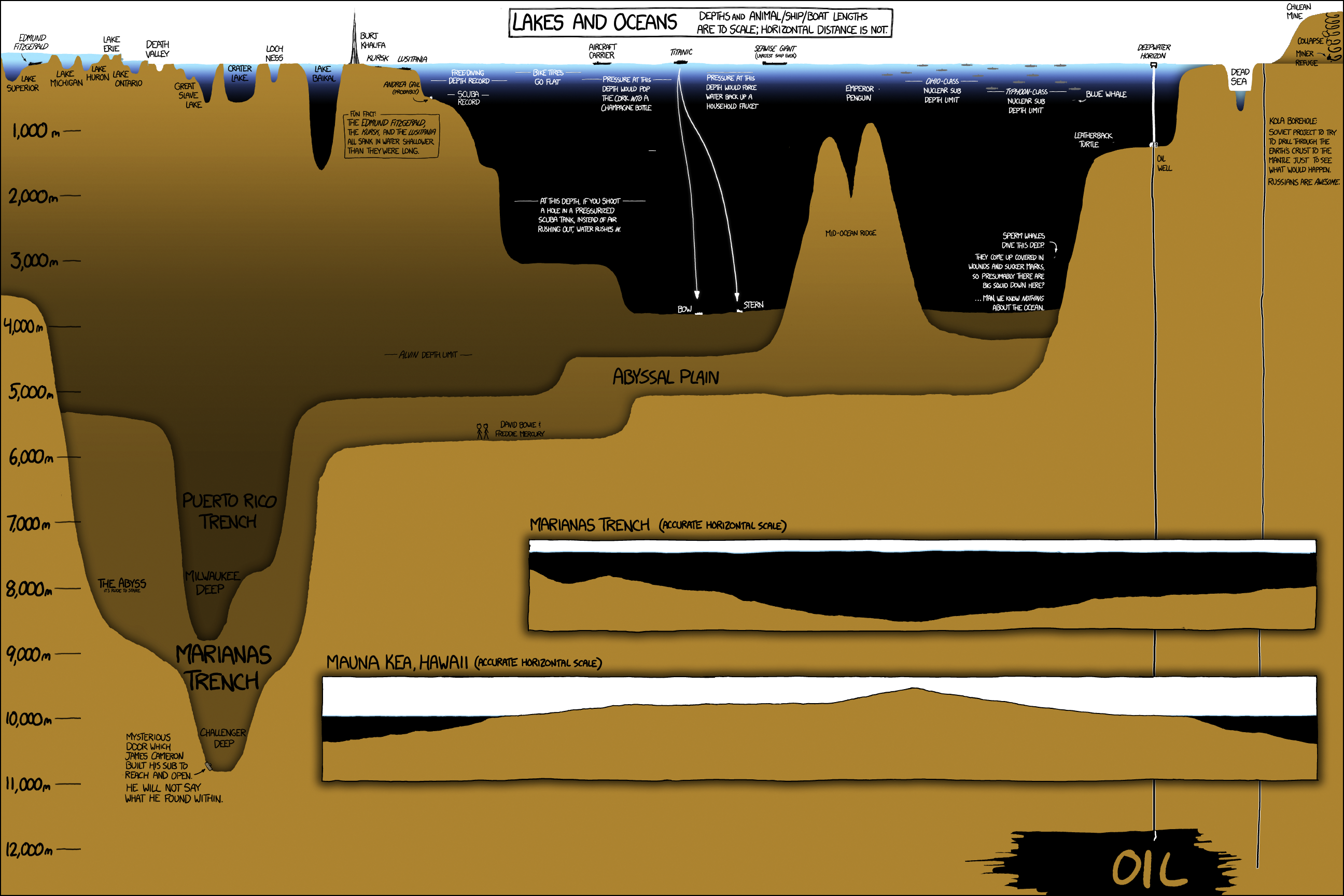
Die Oberfläche des Planeten ist zu ungefähr 71% von den Ozeanen bedeckt (ungefähr 361 Millionen km²). Die Fläche der Russischen Föderation beträgt ca. 17 Millionen km. Die Tiefe der Ozeane ist ungleichmäßig, die folgenden Zonen werden unterschieden:
Regal (Regal - Regal) - Tiefe bis 200-500 m;
Kontinentalhang - Tiefe bis zu 3500 m;
Meeresboden - Tiefe bis 6000 m;
Tiefe Wassertröge - Tiefe unter 6000 m.
Die durchschnittliche Tiefe unterscheidet sich auch:
Atlantik - 3600 m
Inder - 3890 m
Arktis Arktis - 1225 m
Ruhig - 4250 m
Warum kriecht ein Mann unter Wasser?
Historisch gesehen zuerst zum Essen (Fisch, Schalentiere, Arthropoden, Algen). Dann für Ingenieurarbeiten (Bau von Wasserbauwerken, militärische Operationen). Kürzlich für den Bau von linearen Anlagen (Pipelines (Gas, Öl) und Unterseekabel) und Bergbau (Gas, Öl, Ferromangan-Knötchen). Für den Menschen ist der Ozean gefährlich, aber nützlich als Quelle des Guten.
Wie der Mensch die Tiefen eroberte
Tauchen halten
Wenn es zu jeder Zeit Taucher für Perlen und andere Austern gab, wurde das Tauchen in beträchtliche Tiefen in der Neuzeit möglich. Fairerweise ist es notwendig, die Rekordtauchtiefen von Freitauchern zu beachten [1]:
Tauchen mit konstantem Gewicht und Atemstillstand:
Männer - 129 m (Alexey Molchanov, 28.10.2016)
Frauen - 104 m (Alessia Zecchini, 10.05.2017)
UPD:
Männer - 130 m (Alexey Molchanov, 18.07.2018)
Frauen - 107 m (Alessia Zecchini, 26.07.2018)
Von der AIDA-Website .
Keine Grenzen:
Männer -
253,2 m (Herbert Nietzsc, 06.06.2012)
UPD:
AIDA hat den Versuch nicht gezählt.
Männer -
214 m (Herbert Nietzsc, 14.06.2007)
Von der AIDA-Website .
Frauen -
160 m (Tanya Streeter, 17.08.2002)
Es ist auch wichtig zu verstehen, dass Menschen ihr ganzes Leben dem Training widmen, um solche Ergebnisse zu erzielen, während viele sterben, um den Rekord zu brechen.
Nutzung der Errungenschaften von Wissenschaft und Technologie, um eingehend zu arbeiten

Lesbridge Tauchmaschine
1715 baute der Engländer John Lesbridge ein Unterwasserfahrzeug, das bereits der Prototyp eines modernen Hartanzugs war. Ein Mann wurde in einen Metallzylinder mit einem Deckel gelegt. Es gab drei Öffnungen im Zylinder: zwei für die Hände und eine dritte - ein Inspektionsloch, in das Glas eingeführt wurde. Den Beschreibungen zufolge stieg der Erfinder in eine Tiefe von 24 m ab und verbrachte bis zu 34 Minuten unter Wasser. Benutzte eine Maschine, um Werte nach einem Schiffbruch zu erhöhen.
Schwerer Taucheranzug
Wir können das Jahr 1819 weiter hervorheben, als Kristian August Sieb den ersten schweren Taucheranzug einführte, von dem verschiedene Modifikationen noch heute verwendet werden.
Zum Beispiel ein Drei-Loch-Mantel: Diese Standard-Tauchausrüstung wurde vom 19. Jahrhundert bis heute in der russischen Marine und in der Zivilflotte eingesetzt. Sie sind mit Tauchstationen von See- und Schlachttauchbooten, Rettungsschiffen und Schleppern ausgestattet. Es isoliert den Taucher nicht vom Umgebungsdruck (Wasser). Ausgestattet mit Gegensprechanlage.
Der Tauchrekord im gefundenen schweren Tauchanzug betrug
317 Meter [2]. Im Rahmen der Entwicklung von Elementen der K-2-Kursaufgabe (Betrieb eines einzelnen Schiffes auf See für den vorgesehenen Zweck) machten die Tauchspezialisten des Rettungsschiffs Igor Belousov der Pazifikflotte der russischen Marine im Tiefwassertrainingsbereich zunächst einen experimentellen Abstieg in einer Taucherglocke bis zu einer Tiefe von 317 Metern mit Zugang zum Boden.
Basierend auf den Ergebnissen experimenteller Abfahrten bis zu einer Tiefe von 305 m kamen das Navy ACC und das Navy Command zu dem Schluss, dass zur Gewährleistung der Sicherheit von Tauchern die Abstiegstiefe für Abfahrten mit Kurzzeittauchgängen auf 200 m begrenzt werden sollte, da Taucher in großen Tiefen physisch nicht durchführbar waren und die unabhängige Rettung von Tauchern Von einem versunkenen U-Boot aus ist es unmöglich, die Boje aus einer Tiefe von mehr als 200 m zu besteigen [3].
Wiederum sind solche Tiefen nach ausgiebigem Training und der Verwendung von Druckkammern zur Dekompression verfügbar.
Henry Fluss Apparat
Als nächstes können Sie den Henry-Fluss-Apparat des Patents von 1878 hervorheben, der als SCUBA bezeichnet werden kann.
Tauchausrüstung
Im Jahr 1945 Jacques-Yves Cousteau zusammen mit Emil Gagnan Patent Tauchausrüstung. Tauchausrüstung wird heute von den meisten Tauchbegeisterten, professionellen Tauchern und Rettungsschwimmern verwendet.
Tauchausrüstung: 1 - Schlauch, 2 - Mundstück; 3 - Ventil (Getriebe); 4 - Schultergurt; 5 - Rückenschild; 6 - Tank (Gasflasche)
Der Tauchrekord gehört derzeit Ahmed Gabr. Es gelang ihm,
332,4 Meter unter der Wasseroberfläche des Roten Meeres in der Nähe der Stadt Dahab zu erreichen. Der gesamte Tauchgang dauerte 14 Stunden (der Aufstieg dauerte höchstwahrscheinlich mindestens 10 Stunden).
Und wieder erfordern solche Aufzeichnungen eine langwierige Vorbereitung, eine Druckkammer und ein großes Support-Team.
Was ist die maximale Tiefe, in die eine Person eintauchen kann, wenn sie den Druck einer Wassersäule in dieser Tiefe erfährt?COMEX
534 m im offenen Wasser 1988, Marseille, Frankreich [4], unter Verwendung eines COMEX Hydra 8-Atemgemisches (49% Wasserstoff, 50% Helium, 1% Sauerstoff) für insgesamt 6 Personen (4 COMEX-Taucher, 2 von der französischen Marine). Bei den ersten 8 Tagen in der Druckkammer steigt der Druck allmählich auf 53 Atmosphären an. Außerdem arbeiteten alle 6 Taucher in Tiefen von 520 m bis 534 m. Einmal wurde eine Übung durchgeführt, um die Rohre zu verbinden. Nach Erfüllung der geplanten Aufgaben wurden die Taucher 18 Tage lang in einer Druckkammer dekomprimiert.
701 m in der experimentellen Druckkammer 1992, Marseille, Frankreich [5]. Versuchsprotokoll:
- 4 Wochen Vorbereitungszeit vor dem "Tauchgang"
- Zweitägige Isolierung in einer Tiefe von 10 m
- 13 Tage, um mit einem COMEX Hydra 8-Atemgemisch (49% Wasserstoff, 50% Helium, 1% Sauerstoff) einen Druck zu erreichen, der einer Tiefe von 675 m entspricht.
- 3 Tage Druck zwischen 650 m und 675 m
- Dann ging einer der Taucher, Theo Mavrostomos, in eine separate Druckkammer und tauchte mit der Atemmischung COMEX Hydro 10 bis zu einer Tiefe von 701 m weiter, wo er 7 Stunden blieb.
- Dann 24 Tage Dekompression.
- Und 2,5 Monate Beobachtung der Versuchsteilnehmer.
Anscheinend ist der Druck in einer Tiefe von mehr als 700 Metern unter Verwendung eines Gemisches von Gasen zum Atmen extrem.
Es gibt Studien zur Flüssigkeitsatmungstechnologie. Hierzu wird in den Experimenten flüssiger Perfluorkohlenwasserstoff mit darin gelöstem Sauerstoff und Kohlendioxid verwendet. Zum Zeitpunkt der Veröffentlichung werden Experimente an Labortieren durchgeführt.
Hier lohnt es sich, an die durchschnittlichen Tiefen der Ozeane von 1250 m bis 4250 m zu erinnern.
Starre Tauchanzüge
Der nächste Zweig zur Eroberung der Tiefen ist die Schaffung von Kostümen, die den normalen Luftdruck für eine Person aufrechterhalten und vor Umweltdruck schützen.
Gemäß GOST R 52119-2003: Ein starrer Tauchanzug ist für Unterwasserbeobachtungs- und Tauchoperationen durch einen Bediener unter normalem Innendruck ausgelegt (Tauchtechnik. Begriffe und Definitionen).
Ausrüstung für Tiefsee-Operationen (bis zu 600 Meter), bei denen normaler atmosphärischer Druck auf den Taucher wirkt, wodurch das Dekompressionsproblem beseitigt und Stickstoff, Sauerstoff und andere Vergiftungen beseitigt werden. Historisch gesehen können folgende Produkte unterschieden werden:
Taucheranzug Brüder Karmagnol
Taucheranzug mit 20 kleinen Bullaugen von Alphonse und Theodore Carmagnol, Marseille, Frankreich, 1878. Der Raumanzug sollte eine Person bis zu einer Tiefe von 60 m sicher eintauchen können. Er arbeitete jedoch nie richtig und leckte ständig. Jetzt im Museum der französischen Marine.
Kostüme "Neufeld und Kunke"
Drei Generationen von Taucheranzügen der deutschen Firma Neufeld und Kunke, 1917-1940.
Der Anzug der dritten Generation (hergestellt zwischen 1929 und 1940) ermöglichte das Tauchen bis zu einer Tiefe von 160 Metern und war mit einem eingebauten Telefon ausgestattet. Die Entwicklung der Firma „Neufeld und Kunke“ bildete die Grundlage eines starren Raumanzugs des Italieners Roberto Galeazzi in den frühen 30er Jahren des letzten Jahrhunderts, einschließlich der Übernahme der Militärflotte des neu gebildeten Sowjetstaates.
1-Mann-Sub
1933 Mini-U-Boot für eine Person. Der Anzug ermöglicht es dem Taucher, eine beträchtliche Zeit in einer Tiefe von 300 Metern ohne langen Dekompressionsprozess zu arbeiten.
Jum Anzug
JIM Anzug 1974, Harter Anzug. Der Raumanzug wurde in den 70er Jahren des letzten Jahrhunderts in der Ölindustrie eingesetzt. 1979 stellte eine Taucherin, Sylvia Earle, einen Weltrekord in diesem Raumanzug auf. Sie ging 381 Meter hinunter und ging zweieinhalb Stunden am Meeresboden entlang.
Newtsuit
1985 Entwicklung unter der Leitung von Phil Newten. Bis zu einer Tiefe von 900 m getestet, bis zu einer Tiefe von 300 m zertifiziert.
Exosuit
Exosuit ist ein 240-Kilogramm-Zwei-Meter-Anzug aus Aluminiumlegierung, mit dem eine Person in einer Tiefe von bis zu 305 Metern arbeiten kann. Um die Mobilität zu erhöhen und schwachen menschlichen Armen und Beinen zu helfen, ist der Exosuit mit 4 1,6-PS-Antriebsmotoren ausgestattet. (mit der Möglichkeit einer Erhöhung auf 8) sowie 18 Gelenke, die die Beweglichkeit der Hände gewährleisten. Die "Hülsen" des Raumanzugs können mit verschiedenen austauschbaren Düsen ausgestattet werden: Greifer, Fräser, Bohrer usw.
Ein Merkmal von Exosuit ist seine vollständig autonome Lebenserhaltung, während Sauerstoff und Strom von den meisten Schiffen an die ähnlichsten Unterwasser-Raumanzüge geliefert werden. Exosuit verfügt über ein Sauerstoffrückgewinnungssystem, das die Luft von Kohlendioxid reinigt und mit Sauerstoff auffüllt. Das System hat eine Autonomie von 50 Stunden. In Exosuit atmet eine Person unter normalem Druck normale Luft, wodurch unnötiges Risiko und ein langer Dekompressionsvorgang vermieden werden. Exosuit hat einen Wert von 1,3 Millionen US-Dollar.
Atmosphärisches Tauchsystem (ADS 2000)
ADS 2000 wurde 1997 in Zusammenarbeit mit OceanWorks International und der US Navy entwickelt, um die Anforderungen der US Navy zu erfüllen. Gehäuse aus geschmiedeter Aluminiumlegierung T6061, fortschrittliches schwenkbares Design. Es kann 6 Stunden in einer Tiefe von 610 m arbeiten und verfügt über ein autonomes automatisches Lebenserhaltungssystem. Ein integriertes Doppellenksystem ermöglicht dem Piloten eine einfache Navigation unter Wasser. Es wurde von der United States Navy am 1. August 2006 zertifiziert, als der Chief Navy Diver Daniel Jackson in eine Tiefe von 610 m (2.000 Fuß) stürzte.
Selbst mit Raumanzügen kann eine Person bis zu einer Tiefe von 610 m tauchen.
Aber was ist mit U-Booten?
Mit modernen U-Booten können Sie bis zu einer Tiefe von 600-650 m tauchen.
 Klickbar
KlickbarDas sowjetische Atom-U-Boot Komsomolets bleibt der absolute Rekordhalter für maximales Tauchen. 1985 erreichte das U-Boot eine Tiefe von 1027 Metern unter der Meeresoberfläche. Der Arbeitswert dafür betrug 1000 m und der geschätzte Wert 1250 m. Das Schicksal der U-Boote entwickelte sich später tragisch. Komsomolets sank 1989 aufgrund eines schweren Brandes, der in einer Tiefe von etwa 300 Metern begann. Und obwohl es ihm im Gegensatz zu demselben Drescher gelang, aufzutauchen, erwies sich die Geschichte dennoch als sehr tragisch.
Bathyscaphes wurden entwickelt, um Menschen in Tiefen über 600 Meter einzutauchen.
Bathyscaphe
FNRS-2 und FNRS-3
FNRS-2 war die erste Bathyscaphe von Auguste Piccard, Schweiz. Die Arbeiten zur Schaffung einer Bathyscaphe begannen 1937 und wurden durch den Zweiten Weltkrieg unterbrochen. Bathyscaphe wurde 1948 fertiggestellt. Benannt nach der belgischen Stiftung für nationale Forschung (Fonds National de la Recherche Scientifique).
Der eigentliche Bau des FNRS-2 erfolgte in den Jahren 1946-1948. Die Bathyscaphe wurde 1948 bei Probefahrten in der Nähe der Kapverdischen Inseln beschädigt.
Für Tests auf hoher See startete die FNRS-2 Bathyscaphe auf dem 3.500 Tonnen schweren belgischen Schiff Scaldis. Der Scaldis war jedoch nicht stark genug, um den FNRS-2 mit gasgefüllten Schwimmertanks aus dem Wasser zu ziehen. Ein unbemannter Testtauchgang auf 1.400 m wurde erfolgreich abgeschlossen, aber aufgrund technischer Probleme war es nicht möglich, die Schwimmerbehälter von Benzin zu entleeren. Es wurde beschlossen, die FNRS-2 zurück zum Hafen zu schleppen, aber die Bathyscaphe wurde von den Wellen an den Seiten des Schiffes geschlagen und es trat ein Gasleck aus den Schwimmertanks auf. Nachdem ein Leck festgestellt worden war, wurde Benzin ins Meer abgelassen und die FNRS-2 an Bord des Schiffes gehoben. Weitere Tests wurden aufgrund fehlender Reparaturmittel eingeschränkt.
Nach der Einstellung der Finanzierung im Jahr 1948 wurde die FNRS-2 an die französische Marine verkauft. Französische Spezialisten reparierten FNRS-2 und benannten es in FNRS-3 um. Im Februar 1954 erreichte die FNRS-3 eine Tiefe von 4050 Metern im Atlantik, 160 Meilen von Dakar entfernt. Picards bisheriger Rekord lag 1953 bei 3.150 Metern.
Triest
Entworfen in der Schweiz, gebaut in Italien, ein in der Tiefsee bewohntes Forschungsbad. Entworfen von Auguste Piccard. Triest wurde am 26. August 1953 in der Nähe der Insel Capri ins Mittelmeer gebracht. Das Projekt basierte auf früheren Erfahrungen mit der Bathyscaphe FNRS-2. Triest wurde von der französischen Flotte regiert. Nach mehreren Jahren im Mittelmeerraum wurde Triest 1958 von der United States Navy für 250.000 US-Dollar gekauft. Ursprünglich war der Besatzungsbereich für das Eintauchen bis zu 4000 m ausgelegt, aber die US-Marine befahl Krupp, eine Kugel herzustellen, die dem Eintauchen auf 11000 m standhält.
Während der Umsetzung des Necton-Projekts am 23. Januar 1960 tauchten Jacques Picard und der Leutnant der US-Marine, Don Walsh, in eine Tiefe von 10.919 m. So wurde der Challenger Abyss im Marianengraben erstmals erobert.
Archimède
Die Entwicklung der Bathyscaphe mit dem vorläufigen Namen B11000 (Bathyscaphe 11.000 Meter) begann 1957 im Arsenal von Toulon. Die Finanzierung erfolgte durch das französische nationale Zentrum für wissenschaftliche Forschung (CNRS) und die belgische nationale Forschungsstiftung (FNRS). Das Projekt wurde von Pierre Wilm geleitet, FNRS-3-Kapitän Georges Wo war maßgeblich am Entwurf beteiligt. "Archimedes" sollte auf den Grund des Marianengrabens sinken, aber die Bathyscaphe "Trieste" war vor "Archimedes"
Shinkai
Shinkai ist ein bewohntes Unterwasserfahrzeug mit einer Eintauchtiefe von bis zu 600 m. Es wurde 1970 gestartet und hatte bis 1981 die größte Eintauchtiefe unter japanischen Schiffen. Im Besitz und verwaltet von der japanischen Küstenwache.
Shinkai 2000 - 1981 Baujahr. Ultimative Tiefe 2000 m.
Shinkai 6500 - 1990 Baujahr. Die maximale Tiefe beträgt 6500 m.
Suche 6
Das bewohnte selbstfahrende Tiefsee-U-Boot des Bathyscaphe-Typs AS-7 "Search-6" aus dem Projekt 1906 wurde vom Rubin LMBP und dem Malachite SPMBM entworfen und 1975-1979 im Novo-Admiralitätswerk in Leningrad gebaut. Tests des Geräts wurden im Schwarzen Meer und im Pazifischen Ozean durchgeführt, während die Eintauchtiefe von 6.000 Metern überschritten wurde. Tests der Vorrichtung ergaben erhebliche Konstruktionsfehler und gingen mit wiederholten Geräteausfällen einher. Infolgedessen akzeptierte das staatliche Auswahlkomitee im September 1987 unter Berücksichtigung der physischen und moralischen Alterung des AS-7-Apparats diesen nicht als Teil der Marine der UdSSR und erkannte weitere Arbeiten als unangemessen an.
Mir-1 und Mir-2
Vielleicht die berühmteste Unterwasser-Bathyscaphe.

Mir-1 und Mir-2 sind zwei in der Tiefsee bewohnte Fahrzeuge der sowjetischen und russischen Forschung für ozeanologische Forschungs- und Rettungseinsätze. Die Hauptideen zum Design der Apparatur, zur Anordnung ihrer einzelnen Systeme, Komponenten, Elemente, zum Erwerb von Wissenschafts- und Navigationsgeräten gehören I. E. Mikhaltsev, seinem Stellvertreter A. M. Sagalevich und dem Chefprojektingenieur des finnischen Schiffbauunternehmens Sauli Ruohonen, der die Gruppe der finnischen Ingenieure leitete und Techniker, die am Bau der Apparatur beteiligt waren. Tiefseefahrzeuge wurden 1987 von der finnischen Firma Rauma-Repola Oceanics hergestellt, und der Vertrag über die Herstellung der Geräte wurde am 16. Mai 1985 unterzeichnet, und die Abnahmebescheinigung wurde am 17. Dezember 1987 nach erfolgreichen Testtauchgängen im Bottnischen Meerbusen und im Atlantik bis zur maximalen Tiefe unterzeichnet 6170 Meter (Mir-1) und bis zu einer Tiefe von 6120 Metern (Mir-2). Von großer Bedeutung für die wissenschaftliche Forschung ist die Arbeitstiefe der „Welten“ - 6.000 Meter, damit diese Geräte Tiefen erreichen können, in denen sich 98,5% des Meeresbodens befinden. Die Baukosten für jedes Gerät beliefen sich 1987 auf 100 Millionen finnische Mark (17 Millionen Euro).
Jiaolong
Jiaolong ist ein schwimmfreies chinesisches Tiefseefahrzeug. In der Zeit vom 31. Mai bis 18. Juli 2010 machte er 17 Tauchgänge im Südchinesischen Meer, von denen der tiefste - bis zu einer Tiefe von 6759 Metern. Diese Veranstaltung machte China nach den USA, Frankreich, Russland und Japan zum fünften Land, das über moderne Technologie zum Tauchen bis zu einer Tiefe von mehr als 6500 Metern verfügt.
Deepsea Herausforderer
Deepsea Challenger (DCV 1) ist eine Bathyscaphe, in der der kanadische Regisseur James Cameron am 26. März 2012 in den Challenger Abyss (Mariana Trench) eintauchte. Das U-Boot wurde in Sydney, Australien, von Acheron Project Pty Ltd., einem Forschungs- und Entwicklungsunternehmen, gebaut. und enthält wissenschaftliche Geräte und hochauflösende 3D-Kameras. Deepsea Challenger wurde heimlich in Australien in Zusammenarbeit mit National Geographic gebaut und von Rolex unterstützt. Das Scripps Institute of Oceanography, das Jet Propulsion Laboratory und die University of Hawaii halfen beim Bau der Bathyscaphe und der Umsetzung der Mission. Der Bauingenieur war der australische Ingenieur Ron Allum. Die geschätzten Kosten des Geräts betragen 7 Millionen Dollar.
In der Bathyscaphe kann eine Person in jede Tiefe des Ozeans tauchen und sogar Manipulationen am Wasser vornehmen und etwas anheben, aber die Kosten für die Bathyscaphe selbst und ihre Wartung sind ziemlich hoch.
Die Kraft des Ozeans nutzen.
Das Bild zeigt kurz die Hauptarbeitsbereiche im Ozean, ohne die Such- und Rettungsaktionen:- Anbau und Ernte von Meeresfrüchten (Fisch, Schalentiere, Arthropoden, Algen);
- Produktion und Transport von Kohlenwasserstoffen (Öl, Gas, Gashydrate);
- Abbau und Transport von Erz aus Ferromangan-Knötchen;
- Bestattung gefährlicher Abfälle;
- Bau und Reparatur von linearen Strukturen (U-Boot-Glasfaserkabel, U-Boot-Elektrokabel, Pipelines);
- Suche nach Objekten unter Wasser und Kartierung.
Konstruktion und Reparatur von linearen Strukturen
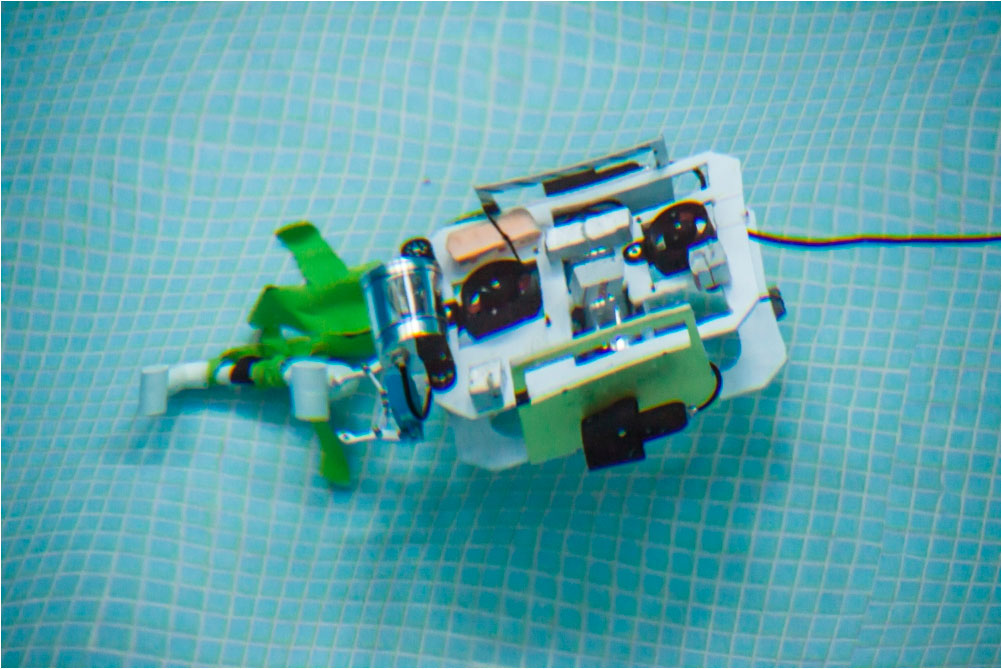
Das spanische Elektrizitätsunternehmen Red Eléctrica de España hat ein Hochspannungs-Gleichstromnetz (HGÜ) implementiert, das die Insel Mallorca mit einem einheitlichen Energiesystem auf dem spanischen Festland verbindet.Ein 244 Kilometer langes System von Hochspannungs-Gleichstromleitungen verbindet die Region Morvedre (in der Nähe von Valencia) mit dem Dorf Santa Ponsa, das sich neben der Hauptstadt Mallorcas - Palma de Mallorca - befindet. Die elektrische Leistung von 400 MW wird über ein Kabel übertragen, das entlang des Meeresbodens verläuft. Die Verluste für die Gleichstromübertragung sind minimal: 250 kW.Wie in der Abbildung zu sehen ist, wurden beim Arbeiten in Tiefen spezielle Mechanismen verwendet. Für die Kabelverlegung wird eine spezielle Capjet-Vorrichtung [6] verwendet, die Verlegung wird von unbewohnten ferngesteuerten Unterwasserfahrzeugen (ROV) gesteuert.Um das Gleiche herum werden Kommunikationskabel verlegt:Die Operation zum Heben des F14 Tomcat-Jägers aus einer Tiefe von 1140 m nahe der mexikanischen Küste. Während des Betriebs wurden ferngesteuerte Unterwasserfahrzeuge eingesetzt.Die Überraschungen des Krieges während des Baus des Nordstroms beseitigen:Offshore-Ölförderung:Ungefähr auch mit Hilfe von ferngesteuerten Geräten wird das Shtokman-Feld entwickelt.Das Gerät sieht also lebendig aus:Also kontrollieren sie es:Und hier ist, was der Bediener gleichzeitig sieht:Telecontrolled Devices (ROV) werden in verschiedenen Klassen mit unterschiedlichen Eintauchtiefen hergestellt. Es gibt solche, die auf 4000 m abgesenkt werden können, es gibt solche, die nicht mehr als 300 m betragen können, ihre Kosten unterscheiden sich auch um Größenordnungen. Wenn Geräte, die für Arbeiten in großen Tiefen geeignet sind, ab 1 Million US-Dollar kosten, kosten Geräte, die in Tiefen von bis zu 300 m betrieben werden, mehrere Zehntausend US-Dollar im Industriedesign.Neben ferngesteuerten Fahrzeugen werden autonome unbewohnte Unterwasserfahrzeuge (AUV) eingesetzt. Sie werden hauptsächlich für Suchaktionen verwendet. Bis Juli 2018 wurde ab 2014 im Indischen Ozean das vermisste Flugzeug malaysischer Fluggesellschaften mit Hilfe solcher Geräte gesucht.Autonome Unterwasserfahrzeuge werden verwendet, um den Status linearer Unterwasserstrukturen (Pipelines, Kabelleitungen) zu überwachen, die Bodenoberfläche abzubilden und großflächige Forschung zu betreiben. Die meisten autonomen Geräte werden in Form eines Torpedos hergestellt, um den Frontalwiderstand von Wasser zu verringern und dadurch die Arbeitsdauer unter Wasser mit einer einzigen Batterieladung zu verlängern.
Abbau von Ferromangan-Knötchen
Ferromangan-Knötchen sind authigene Mineralverengungen von Eisen- und Manganhydroxiden sowie anderen Elementen am Boden von Seen, Meeren und Ozeanen. Am weitesten verbreitet in den pelagischen Regionen der Ozeane. Erstmals von der englischen Expedition auf dem Schiff Challenger in den Jahren 1872-76 studiert. Detaillierte Informationen zu Ferromangan-Knötchen (räumliche Verteilung, Faziesbildung, Petrographie, Mineralogie und Geochemie) wurden als Ergebnis von Untersuchungen des Meeresbodens von Forschern aus verschiedenen Ländern (Großbritannien, CCCP, USA, Deutschland, Japan usw.) während des Internationalen Geophysikalischen Jahres erhalten (1957-1958) und in den Folgejahren.
Die geschätzten Reserven der drei Ozeane betragen 200 Milliarden Tonnen, der Atlantik enthält 45 Milliarden Tonnen, der Pazifik - 112 Milliarden Tonnen, der Indische Ozean - 41 Milliarden Tonnen. Ablagerungen, die in relativ geringer Tiefe auftreten und typische Sorten von Manganvorkommen sind, werden gefunden in einer Tiefe von bis zu 400 Metern vor der Küste von Bahia, Kalifornien und Japan. Knötchen vor der Küste Japans befinden sich in einer Tiefe von 100 bis 360 Metern auf der oberen Schicht des Meeresbodens entlang des Auzu-Archipels in der Nähe von Tokio.
Nautilus Minerals Ltd. baut ein spezielles Schiff zur Aufbereitung von Erz, das vom Meeresboden aus gefördert wird [7].
Ferromangan-Knötchen des Weltozeans enthalten im Durchschnitt die folgenden Erzbestandteile (%): Na 1.9409; Mg 1,8234; Al 2,82; Si 8,624; P 0,2244; K 0,6427; Ca 2,47; Ti 0,647; V 0,0558; Cr 0,0035; Mn 16,02; Fe 15,55; Ni 0,480; Co 0,284; Cu 0,259; Zn 0,078; Sr 0,0825; Zr 0,0648; Mo 0,0412; Tl 0,0129; Pb 0,0900. Charakteristisch ist das Vorhandensein von Ag, Ir, B, Cd, Yb, W, Bi, Y, Hg und anderen Elementen, deren Konzentrationen deutlich über den Durchschnittswerten für die Erdkruste liegen. Nach dem Durchschnittsgehalt der Haupterzkomponenten (Ni, Cu, Co, Mn) sind Ferromanganknollen in den einzelnen untersuchten Regionen mit den auf den Kontinenten entwickelten Erzerzen vergleichbar.
An der Oberfläche sieht das Erz so aus:
Sehr bald versprechen sie, eine industrielle Produktion aufzubauen.
Interesse
Im Allgemeinen gelten Unterwasserfahrzeuge oder Roboter seit 2015 als die neue Vorderkante von Robotern (The Next Big Drone Frontier) [8].
Der UUV-Markt wird voraussichtlich bis 2022 5,20 Mrd. USD erreichen, mit einer CAGR von 14,07% von 2017 bis 2022. Das Marktwachstum kann durch die Zunahme der Offshore-Öl- und Gasförderung in der Tiefsee und die Zunahme der Bedrohungen für die Sicherheit des Seeverkehrs erklärt werden.
Generell ist das Interesse an Unterwasserrobotik in den USA, China, der EU und Singapur recht groß.
Patentforschung bestätigt dies.
Geographie von Ländern, die Patente auf dem Gebiet der Unterwasserrobotik angemeldet haben:
Verteilung nach Anzahl der eingereichten Anträge:
Es ist ersichtlich, dass China nun an erster Stelle steht und wir in einigen Jahren Entwicklungen bei Eisen und ein weiteres Wachstum der Wirtschaftsindikatoren beobachten werden.
Segmentierung der in diesem Bereich verwendeten Technologien:
Liste der Hersteller von Unterwasserrobotik .
Natürlich wird mit Schülern und Schülern gearbeitet. In der Tat werden in den nächsten Jahren alle diese Entwicklungen in die Industrie gehen und Spezialisten müssen mit den zu erstellenden Unterwasserfahrzeugen arbeiten.
Ein Indikator für die Verfügbarkeit solcher Arbeiten ist das Vorhandensein von Wettbewerben in der Unterwasserrobotik:
- MATE Internationaler ROV-Wettbewerb (jährlich seit 2002)
- AUVSI RoboSub Wettbewerb (jährlich seit 1997)
- Singapur AUV Challenge (jährlich seit 2013)
- Student Autonomous Underwater Challenge-Europe (SAUC-E) (jährlich seit 2006)
MATE Internationaler ROV-Wettbewerb
Die massivste Konkurrenz. In den Vereinigten Staaten erklären rund 600 Bildungseinrichtungen die Teilnahme an Qualifikationsrunden. Sie sind in Schul- und Schülerwettbewerbe in verschiedenen Klassen unterteilt:
- Explorer - Student
- Ranger - Schüler;
- Navigator - Gymnasium;
- Pfadfinder - Grundschüler.
Die Teams aus Wladiwostok spielen erfolgreich:
Russisches Team bei internationalen Wettbewerben in der Unterwasserrobotik (2009)Das DVFU ROV Team 2010Das russische Team wurde zweimaliger Weltmeister in der Unterwasserrobotik (2012)2013 JahrRobotik-Entwicklungszentrum für Schulkinder (2015)Schüler und Studenten Robotics Development Center (2018)ROBOSUB
Der prestigeträchtigste Wettbewerb für Studenten. Gefördert von der UAV Foundation und dem Office of Naval Research. Studententeams aus der ganzen Welt nehmen teil. 2018 gewannen die Chinesen an der Harbin Engineering University den zweiten Platz an der National University of Singapore. Führen Sie erfolgreich Studenten der FEFU und der Moskauer Staatlichen Universität durch. Nevelsky.
RoboSub 2012 Aufklärung im Kampf und Erreichen des FinalesSingapur AUV Challenge
Wettbewerb in autonomen Unterwasserfahrzeugen. Studenten aus Ländern im asiatisch-pazifischen Raum nehmen teil. Führen Sie erfolgreich FEFU-Studenten durch.
Student Autonomous Underwater Challenge-Europe
Leider kenne ich die Teilnehmer aus Russland nicht.
Was haben wirBis zu 600+ Teams wie in den USA sind noch weit weg, aber es gibt auch Interesse:
- MATE ROV Wettbewerb Wladiwostok (Qualifikationsrunde für den großen MATE, seit 2015);
- VRO Waterborne IRS (seit 2016 in Innopolis);
- Wasserprofil der NTI-Olympiade (seit 2017);
- Die ersten allrussischen Wettbewerbe in der Unterwasserrobotik Wladiwostok 2018 (August-September 2018);
- Der erste Unterwasserrobotikwettbewerb für Schüler der Klassen 1-4 (2018-2019).
MATE ROV Wettbewerb Wladiwostok
Findet in Wladiwostok auf der Grundlage des Beckens der Moskauer Staatsuniversität statt. Nevelsky.
Anmeldung von Dezember bis März .
Beschreibung
hier .
Neuigkeiten
hier und
hier .
Video
hier .





VRO Wasser IRS
Sie fanden Ende Juni im Rahmen des Finales der
Allrussischen Robotik-Olympiade in Innopolis statt. Für 2019 ist noch nicht bekannt, ob Innopolis das Finale des BPO abhalten wird.
Die Registrierung beginnt im Frühjahr .
NTI Olympiade Wasserprofil
Die Registrierung hat bereits begonnenDie ersten allrussischen Wettbewerbe in der Unterwasserrobotik Wladiwostok 2018 (Aquareobototech 2018)
Schon weg. Sie können
hier und
hier darüber lesen.
Hier ansehen.
Der erste Wettbewerb in Unterwasserrobotik für Schüler der Klassen 1-4
Wettbewerbsregeln
hier .
Die Registrierung endet am 30. September .
Angebot
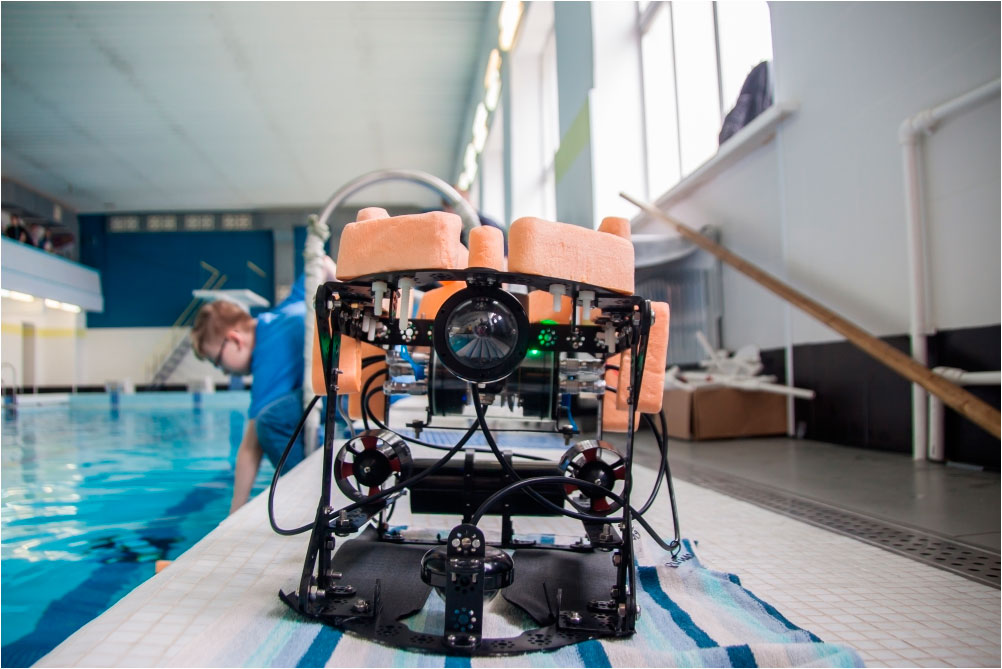
Für die Unterwasserrobotik können wir folgende Sets anbieten:
- Micro Underwater Robot ( MUR ) - Ein für NTI und VRO empfohlenes Set.
- MUR MiddleROV Telecontrol Robot Montagesatz
- Montagekit für Fernsteuerungsroboter MUR ElementaryROV
- MUR HighROV - für die Teilnahme an MATE (auf Bestellung)
Weitere Informationen auf der
Website des Zentrums für Robotik