Das Bohren von Leiterplatten bereitet einem Elektronikingenieur echte Kopfschmerzen, aber unser neues Gerät wird dazu beitragen, es ein wenig zu mildern. Diese einfache und kompakte Ergänzung zu Minibohrern verlängert die Lebensdauer des Motors und der Bohrer. Schema, Board, Setup-Anweisungen, Video - alles im Artikel!
Wofür ist die Geschwindigkeitsregelung?
In der Regel werden Minibohrer auf Basis herkömmlicher Gleichstrommotoren gebaut. Und die Drehzahl solcher Motoren hängt von der Last und der angelegten Spannung ab. Infolgedessen dreht sich der Motor im Leerlauf sehr stark und zu Bohrzeiten schwimmt die Motordrehzahl in einem weiten Bereich.
Wenn Sie die Spannung am Motor reduzieren, wenn dieser nicht belastet wird, können Sie die Ressourcen sowohl der Bohrer als auch der Motoren selbst erhöhen. Darüber hinaus wird sogar die Bohrgenauigkeit verbessert. Der einfachste Weg, dies zu erreichen, besteht darin, den vom Motor verbrauchten Strom zu messen.
Es gibt viele Schaltkreise solcher Regler im Internet, aber die meisten von ihnen verwenden lineare Spannungsregler. Sie sind massiv und müssen gekühlt werden. In Zusammenarbeit mit
TinyElectronicFriends wollten wir ein kompaktes Board auf Basis eines
Pulsstabilisators herstellen, damit es nur am Motor "abgenutzt" werden kann.
Schema
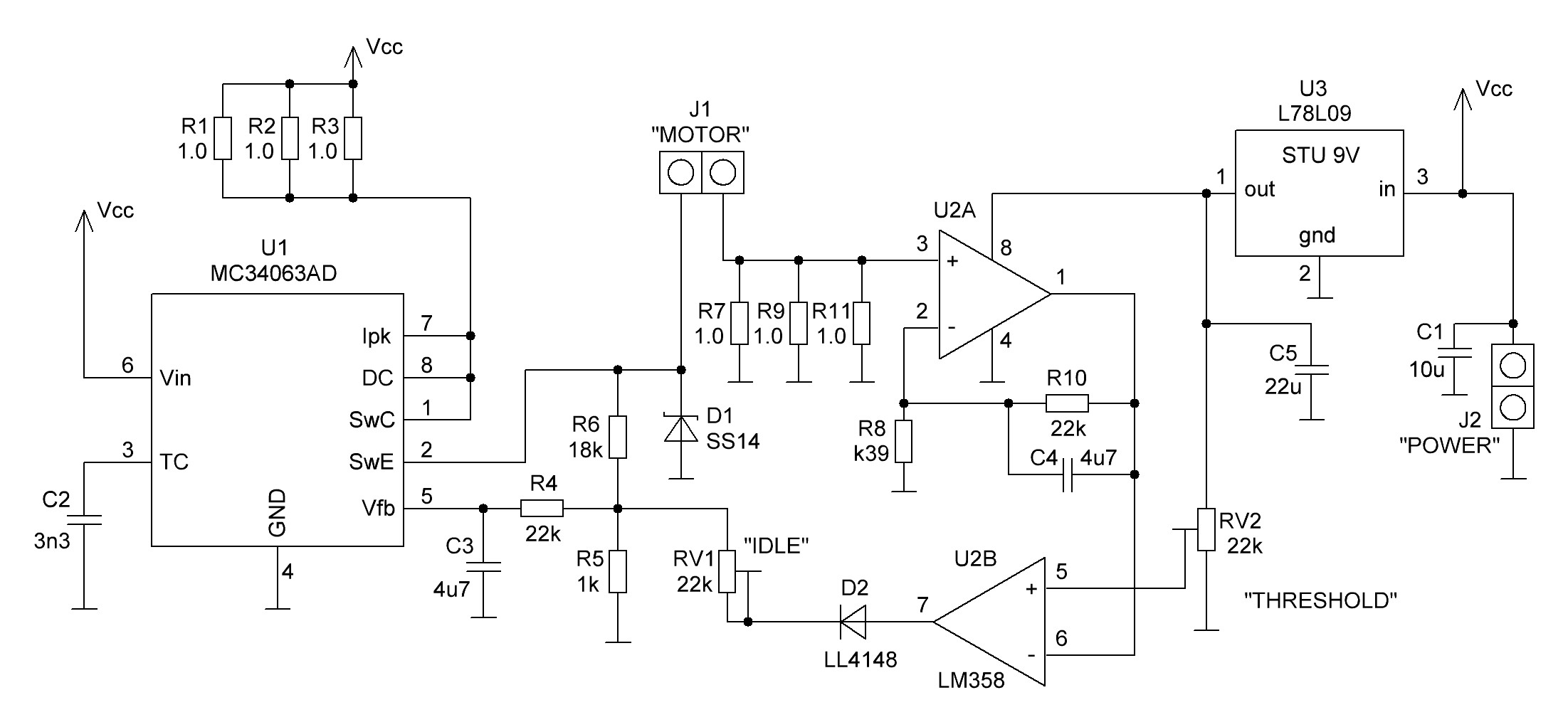
Ein PWM-Controller mit integriertem Schlüssel MC34063 regelt die Spannung am Motor. Die Spannung am Shunt R7, R9, R11 wird vom Operationsverstärker verstärkt und über den Komparator dem Rückkopplungseingang des PWM-Controllers zugeführt.
Wenn der Strom unter einem bestimmten Wert liegt, wird abhängig von der Widerstandseinstellung RV1 eine Spannung an den Motor angelegt. Das heißt, im Leerlauf wird nur ein Teil der Leistung an den Motor geliefert, und mit dem Abstimmwiderstand RV1 können Sie gleichzeitig die Drehzahl einstellen.
Wenn das Signal am Ausgang des Operationsverstärkers die Spannung am Komparator überschreitet, wird die volle Spannung an den Motor angelegt. Das heißt, beim Bohren schaltet sich der Motor mit maximaler Leistung ein. Die Schaltschwelle wird durch den Widerstand RV2 eingestellt.
Ein linearer Stabilisator wird verwendet, um den Operationsverstärker mit Strom zu versorgen.
Alle Komponenten der Schaltung geben sehr wenig Wärme ab und Sie können sie vollständig auf den SMD-Komponenten sammeln. Es kann mit einem großen Bereich von Versorgungsspannungen arbeiten (abhängig vom Widerstand R6), benötigt keine Steuerungen und Geschwindigkeitssensoren.
Leiterplatte
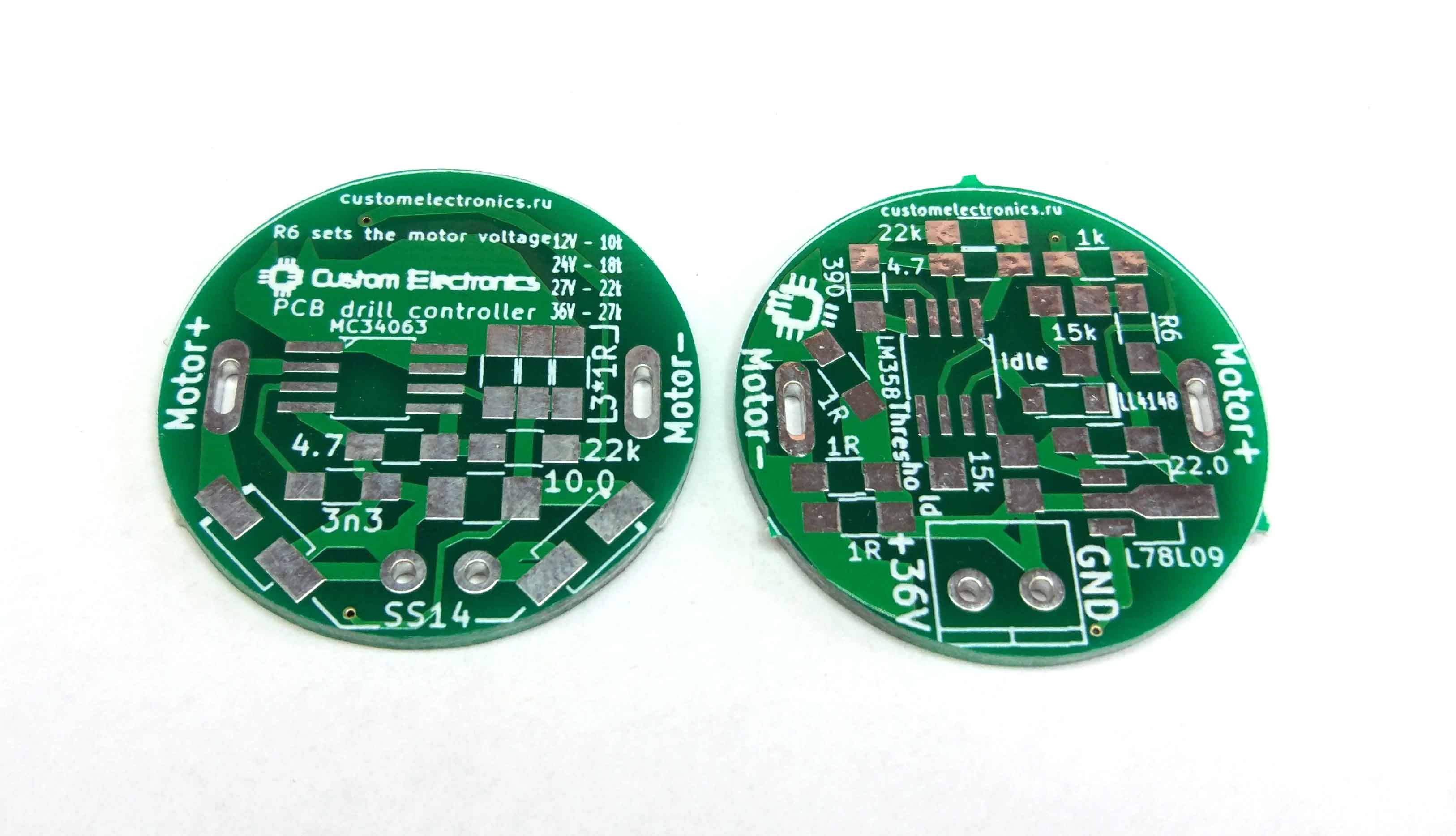
Die gesamte Schaltung passt auf eine doppelseitige Leiterplatte mit einem Durchmesser von 30 mm. Darauf befinden sich nur wenige Durchkontaktierungen, die leicht „zu Hause“ hergestellt werden können. Unten im Artikel finden Sie Dateien zum Herunterladen der PCB-Datei für SprintLaout.
Liste der Komponenten
Hier ist eine vollständige Liste von allem, was Sie zum Erstellen benötigen:
- Leiterplatte (Link zu den Dateien für die Herstellung am Ende des Artikels)
- U1 - MC34063AD Schaltstabilisator, SOIC-8
- U2 - LM358, Operationsverstärker, SOIC-8
- U3 - L78L09, Stabilisator, SOT-89
- D1, D3 - SS14, Schottky-Diode, SMA - 2 Stück
- D2 - LL4148, Gleichrichterdiode, MiniMELF
- C1 - Kondensator, 10 uF, 50 V, 1210
- C2 - Kondensator, 3,3 nF, 1206
- C3, C4 - Kondensator, 4,7 uF, 1206 - 2 Stück
- C5 - Kondensator, 22 uF, 1206
- R1-R3, R7, R9, R11 - 1 Ohm Widerstand, 1206 - 6 Stck.
- R4, R10 - 22kΩ Widerstand, 1206 - 2St
- R5 - 1 kΩ Widerstand, 1206
- R6 - Widerstand 10-27 kOhm, 1206. Der Widerstand hängt von der Nennspannung des verwendeten Motors ab. 12 V - 10 kOhm, 24 V - 18 kOhm, 27 V - 22 kOhm, 36 V - 27 kOhm
- R8 - Widerstand 390 Ohm, 1206
- RV1, RV2 - interlinearer Widerstand, 15 kOhm, Typ 3224W-1-153 - 2 Stück
- XS1 - Anschluss, 2 Stifte, Abstand 3,81 mm
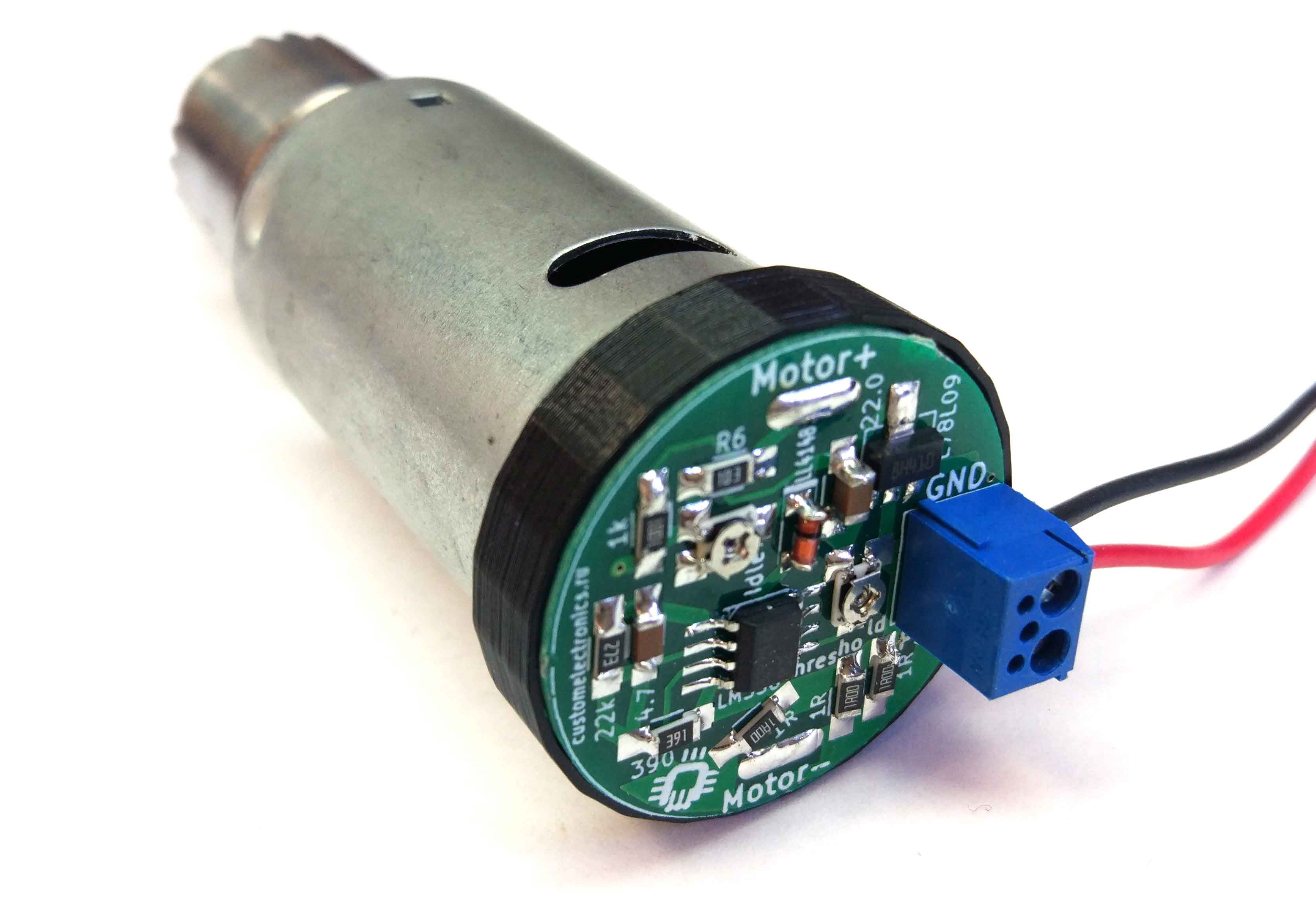
Wir haben auch einen Begrenzungsring auf einem 3D-Drucker hergestellt, um eine bequeme Installation am Motor zu ermöglichen. Download-Link für die STL-Datei zum Download am Ende des Artikels.

Montage und Konfiguration
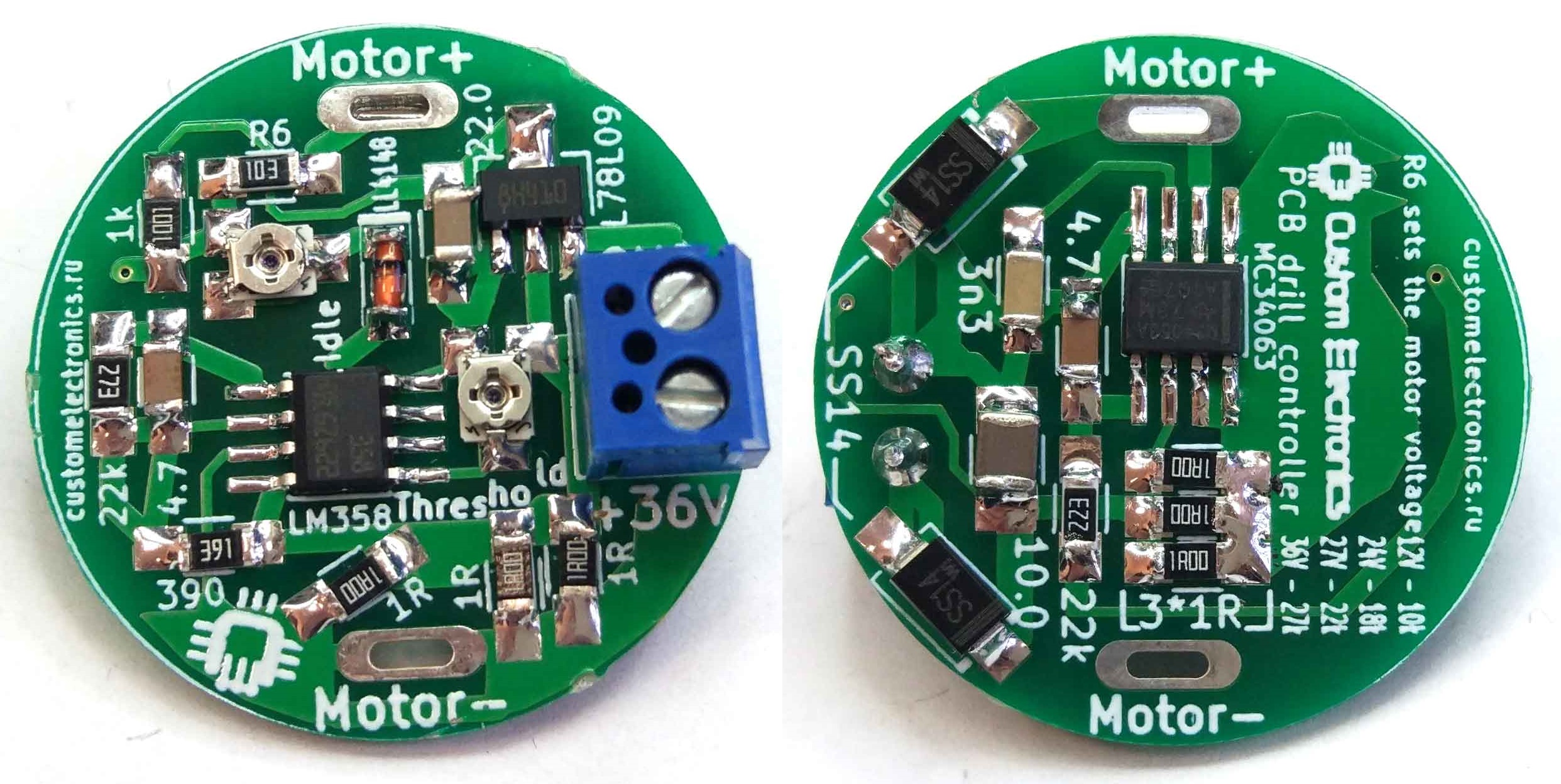
Alles wird ganz einfach. Kontaktflächen sind zum manuellen Löten gezeichnet.
Es lohnt sich, mit der Montage der Platine selbst zu beginnen, indem Sie alle Komponenten auf der Seite der Platine ohne Abstimmwiderstände und dann auf der Rückseite installieren. Das Terminal ist zuletzt einfacher zu installieren. Die R6-Bewertung wird entsprechend der Nennspannung Ihres Motors ausgewählt. Bei diesem Gerät ist es wichtig, die Position des Schlüssels auf den Chips und die Polarität der Dioden zu steuern. Alle anderen Komponenten sind nicht polar.
Installieren Sie einen Abstandshalter zwischen der Platine und dem Motor, damit die Platine den Motor nicht berührt. Das Board selbst wird direkt an den Motorrippen getragen. Überprüfen Sie die Polarität des Motoranschlusses mehrmals, damit er sich nach rechts dreht, und löten Sie dann die Kontakte.
Die Kontakte zur Spannungsversorgung des Eingangs der Karte sind mit "GND" und "+ 36V" gekennzeichnet. Das Minus der Eingangsspannungsquelle ist mit dem "GND" -Pin und das Plus mit "+ 36V" verbunden. Die Spannung des Netzteils muss mit der Nennspannung des Motors übereinstimmen.
Das Einstellen des Reglers ist sehr einfach:
- Stellen Sie den Widerstand RV2 maximal auf den Reglerschwellenwert ein
- Stellen Sie den Widerstand RV1 auf die optimale Leerlaufdrehzahl des Motors ein
- Stellen Sie den Widerstand RV2 auf einen solchen Schwellenwert ein, dass bei Auftreten der geringsten Last die Spannung am Motor ansteigt
Video
Es ist schwierig, die Auswirkung der Verwendung auf das Video zu bewerten, aber jetzt bohren wir immer nur mit dem Regler! Es ist nur ein wenig gewöhnungsbedürftig und sorgt dafür, dass die Bohrer gut geschärft sind. Und natürlich können Sie es jederzeit für immer auf das Maximum schalten.
Referenzen
Auf der
Hauptseite des Projekts finden Sie Links zum Herunterladen aller erforderlichen Dateien.
Vielen Dank für Ihr Interesse!