Hallo allerseits! Vor nicht allzu langer Zeit begann ich, Programmierung für Mikrocontroller zu studieren. Am Anfang machte das Schreiben einfacher Programme zum Blinken einer oder sogar zweier LEDs keinen Spaß mehr und wurde langweilig. Und eines Abends, als er darüber nachdachte, womit er sich beschäftigen sollte, beschloss er, komplexere Projekte zu finden. Im Internet habe ich viele Dinge gesehen, die Menschen erschaffen, aber vor allem hat mich ein sechsbeiniger Roboter oder Hexapod überrascht.
Inspiriert von den Bildern und Videos, beschloss ich, mich zu versuchen. Die Entwicklung des Gehäuses, der Elektronik und der Programme wird ab 0 durchgeführt.
Entwicklungsstadien:Teil 1 - DesignTeil 2 - MontageTeil 3 - KinematikTeil 4 - mathematische Trajektorien und SequenzenTeil 5 - ElektronikTeil 6 - Übergang zum 3D-DruckTeil 7 - Neues Gehäuse, Anwendungssoftware und KommunikationsprotokolleEntwicklung eines 3D-Modells des Körpers
Rohstoffe und Komponenten für den zukünftigen Roboter:
0. Arduno Due (wir werden in Atmel Studio in reinem C ohne Arduino IDE schreiben, gleichzeitig werde ich Ihnen sagen, wie man einen Debugger an dieses Board anschließt) - 1 PC;
1. HLK-RM04 (UART zu WIFI-Konverter) - eine transparente Brücke mit UART zu WIFI - 2 Stück;
2. Servos MG996R (aus China, wie kann man ohne) - 18 Stück;
3. LM317D2T-TR zur Versorgung von Servos + feiner Muschel in Form von Widerständen und Kondensatoren;
4. CAD "COMPASS 3D";
5. Sperrholz 3 mm als Material für das Gehäuse (billig und riecht köstlich);
6. Möglichkeit, Laserschneiden zu bestellen;
7. Zeit. Lange Zeit.
Gleich zu Beginn der Reise stellte sich die Frage: „Was für ein Gebäude möchte ich?“. Bei der Suche nach einer Antwort auf diese Frage stieß ich auf mehrere vorgefertigte Lösungen. Am beliebtesten waren PhantomX und A-Pod. Nachdem ich mir die Fälle angesehen hatte, entschied ich, dass bereits mit der Entwicklung begonnen werden sollte, aber nein. Das folgende Problem trat auf: Da ich diese Roboter nicht in meinen Augen sah und sie nicht in meinen Händen hielt, hatte ich eine schlechte Vorstellung von ihren Dimensionen. Auf der Suche nach einer Lösung für dieses Problem bin ich auf einen der Artikel über den Habr gestoßen. Der Autor des Artikels
Tomnewmann teilte mir freundlicherweise die Zeichnungen seines Projekts mit, für die ich ihm
vielmals danke.
Nachdem ich die Dimensionen zukünftiger Details erkannt und ein wenig über alle erhaltenen Informationen nachgedacht hatte, begann ich, die Zeichnungen des Falles zu skizzieren. Ich dachte, es wäre klüger, mit dem Design der Beine zu beginnen, da sie der schwierigste Teil des Körpers sind.
Coxa
Nach mehreren Stunden des Nachdenkens erschien das erste Coxa-Modell (es ist üblich, den Knoten zu bezeichnen, der das Bein mit dem Körper verbindet). Der Knoten hat versucht, ihn so kompakt wie möglich zu gestalten. Der Servoantrieb befindet sich vollständig im Inneren, sodass Sie das Loch für die Kabelausgabe nicht vergessen dürfen (was ich beim ersten Mal getan habe).
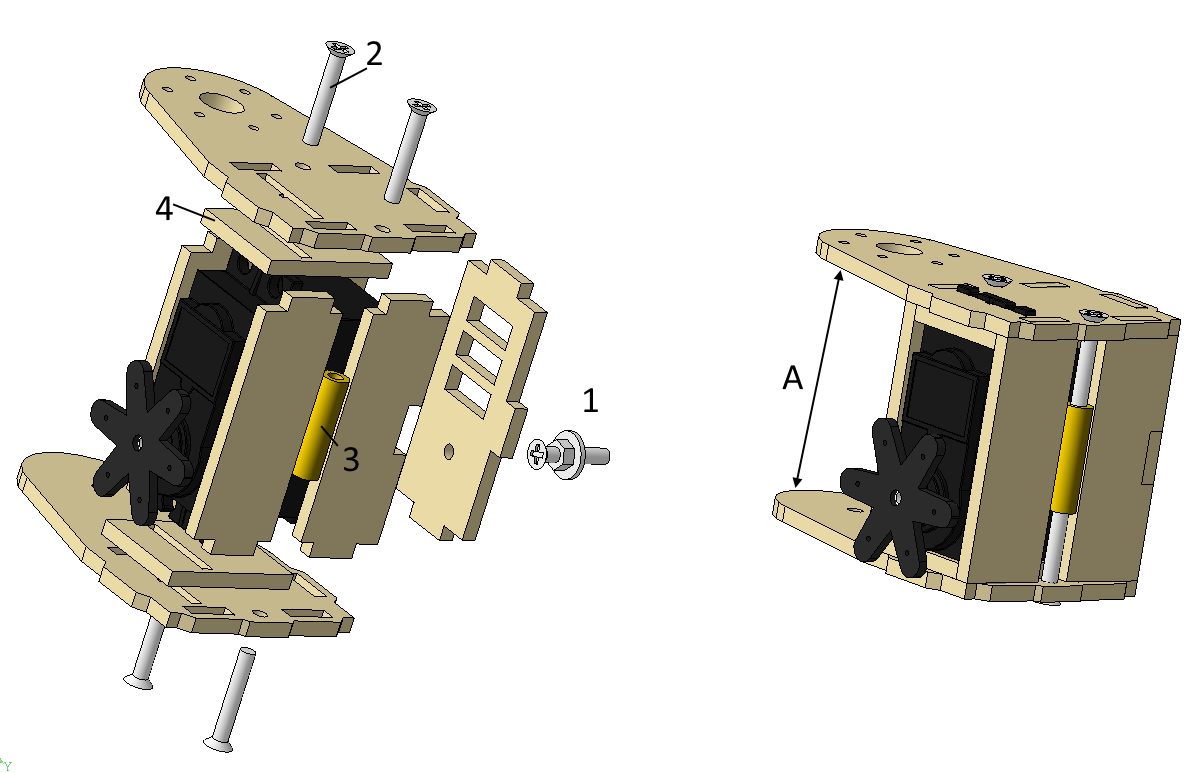 Detail 1 - Die Achse, an der der Femur befestigt wird (der zweite Teil des Beins). Zusammengebaut aus M3x15 Schraube, M3 Unterlegscheibe und Mutter
Detail 1 - Die Achse, an der der Femur befestigt wird (der zweite Teil des Beins). Zusammengebaut aus M3x15 Schraube, M3 Unterlegscheibe und Mutter
Teil 2 - Schraube M3x20
Teil 3 - Rack für PCB M3x20
Detail 4 - Sie sind eine Art Servo-Verriegelung, um zu verhindern, dass sie sich vertikal bewegen.
Die Höhe (A) dieses Knotens muss so eingestellt werden, dass der auf dem Rahmen stehende Servoantrieb hineinpasst.Femur
Als nächstes müssen Sie "Femur" machen. Das Detail erwies sich als das einfachste von allen und ich denke, es braucht keine Kommentare.
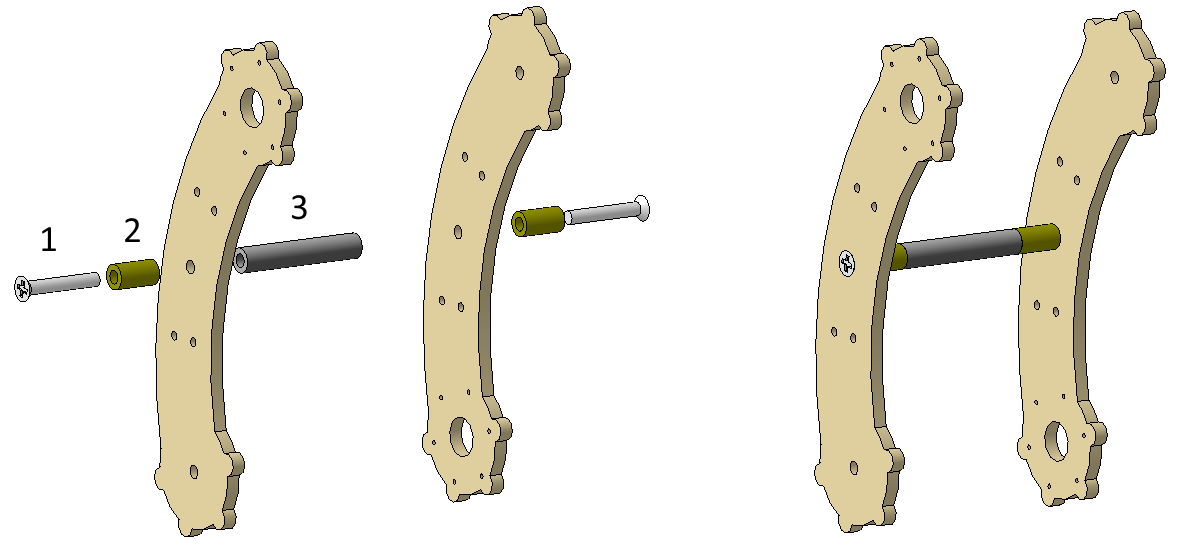 Teil 1 - Schraube M3x20
Teil 1 - Schraube M3x20
Detail 2 - Kunststoffhülle 3x10 (Ich habe keinen langen Ständer gefunden, ich musste nach anderen Lösungen suchen)
Teil 3 - Rack für PCB M3x30Tibia
Das nächste Detail ist Tibia, der letzte Teil des Beins. Es sollte keine Probleme damit geben und seine Länge hängt von der Höhe ab, bis zu der der Roboter verstehen soll. Ich habe es 130 mm von der Achse des Servos entfernt, ich habe es nicht mehr gemacht, da mit zunehmender Länge auch die Belastung der Servos zunimmt, insbesondere des Servos in Coxa. Auf der zweiten Seite habe ich ein zweites Loch für die Achse gemacht, damit das Servo umgedreht und die Länge des Hebels verringert werden kann, wenn die Servos plötzlich hart sind.
Rahmen
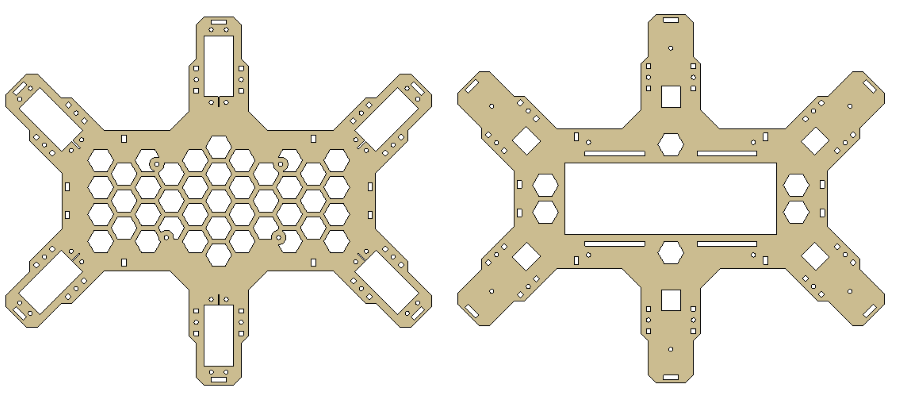
Als nächstes folgt der Rahmen - der größte Teil. Sie bestimmt die Konfiguration der Beine des zukünftigen Roboters. Es gibt verschiedene Optionen für die Position der Beine, aber ich habe mich für die Option mit dem Buchstaben Zh entschieden (von oben gesehen sieht es so aus).
In den ersten Phasen des Entwurfs stellte sich die Frage: "Und in welchem Abstand sollten die Beine voneinander sein?" Auf der Suche nach einer Antwort auf diese Frage wurde mir klar, dass es zu diesem Thema keine Empfehlungen gibt. Er studierte die Projekte und Gangoptionen anderer Menschen und kam zu dem Schluss, dass der Abstand basierend auf dem gewünschten maximalen Drehwinkel der Extremität ausgewählt wird. Je größer der Abstand zwischen den Beinen ist, desto größer ist der Winkel, den die Gliedmaßen beim Gehen erreichen können.
Die
Tomnewmann- Zeichnungen halfen
mir , dieses Problem zu lösen, bei dem ich den Abstand zwischen den Beinen nahm, da die Abmessungen der Roboter ziemlich ähnlich waren (meine sind etwas kleiner). Einige Stunden später wurden der obere und untere Teil des Rahmens geboren:
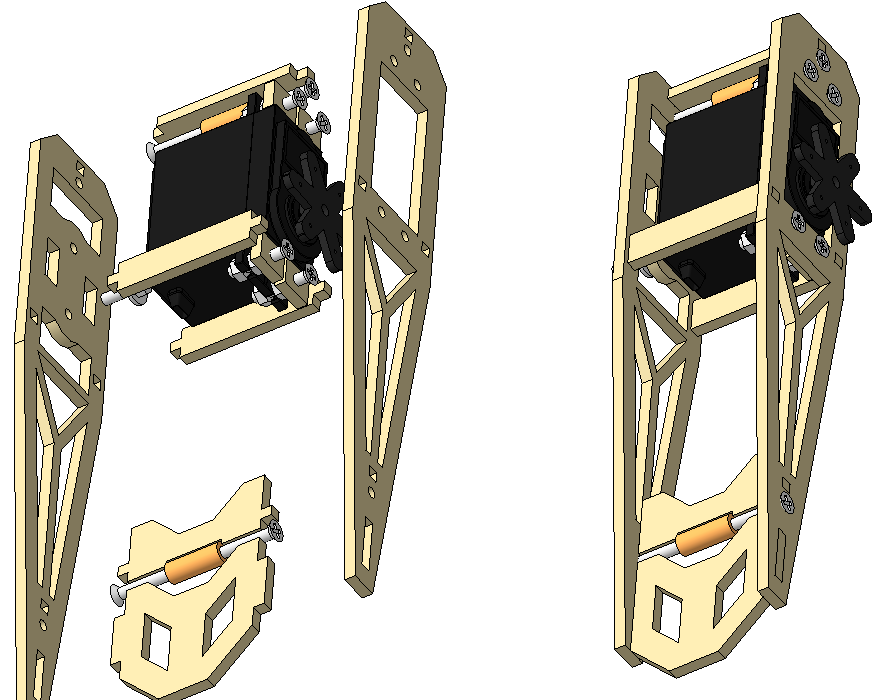
Am unteren Rand des Rahmens befindet sich eine Aussparung für die Batterie und ihre Befestigungselemente. Übrigens wird es mit einem Klettverschluss befestigt, der beim Anbringen der Batterie an Quadrics verwendet wird. Der Rahmen ist ziemlich groß. Nachdem ich noch einen Abend gesessen und Zwischenteile in Form von Stützen zwischen den Teilen hergestellt hatte, entschied ich, dass es Zeit war, den Rahmen mit installierten Servos zusammenzubauen. Das Ergebnis ließ nicht lange auf sich warten:
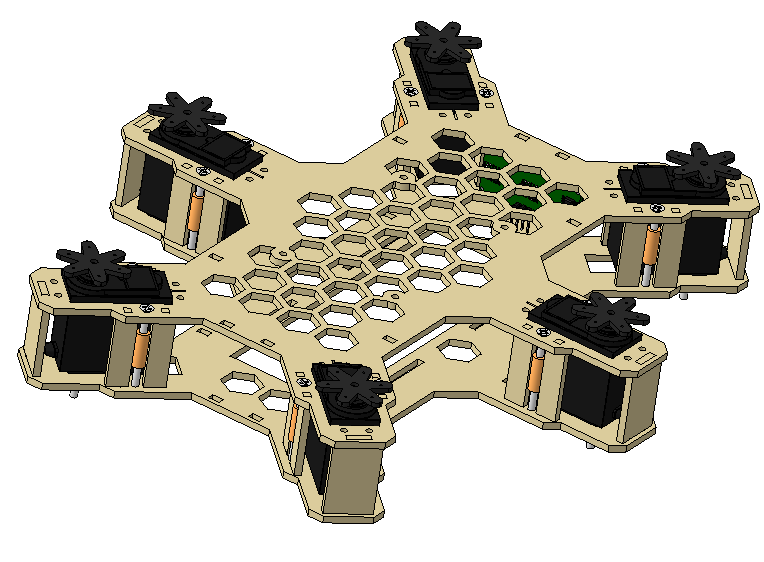
Da wir bereits über alle erforderlichen Komponenten verfügen, können Sie eine vollständige Montage des Gehäuses vornehmen:
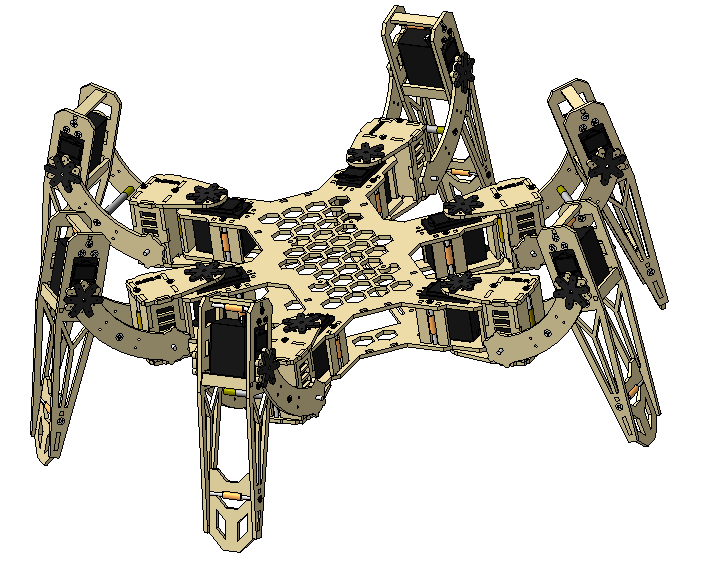
In der Mitte des Gehäuses zwischen den Platten war eine Stromversorgung für Servos, eine 3S Li-Po-Batterie unten und eine Steuerplatine (Arduino Due) oben geplant. Dementsprechend habe ich die Rahmenbaugruppe geändert:
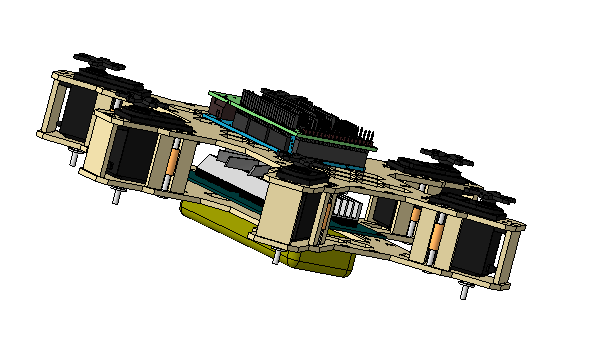 Das Board oben ist ein Arduino Mega-Modell mit einer Art Schild. Es wird nur für den Look verwendet und hat die gleichen Abmessungen wie Due.
Das Board oben ist ein Arduino Mega-Modell mit einer Art Schild. Es wird nur für den Look verwendet und hat die gleichen Abmessungen wie Due.Es sieht nicht sehr schön aus, aber unter Berücksichtigung der herausstehenden Drähte wird es noch schlimmer. Außerdem kam mir der Körper sehr dünn vor. Ich beschloss, die Elektronik so weit wie möglich abzudecken, ohne das Erscheinungsbild zu beeinträchtigen, und fand einen Namen für meine Idee.
Die Lösung für das erste Problem waren die Abdeckungen oben und unten, die die Batterie und die Steuerelektronik abdeckten. Dies sind die einzigen Teile, die mit Klebstoff zusammengebaut werden. Einen Abend später wurde ein Bottom-Cover-Modell geboren.
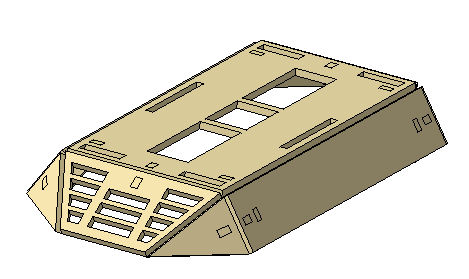
Wenn es bei der ersten Aufgabe keine Probleme gab, gab es bei der zweiten Aufgabe 2 Tage lang Schwierigkeiten. Ja, ich habe so viel Zeit gebraucht, um einen Namen für ihn zu finden. Der versehentliche Rückruf des Films "Terminator" beschloss, ihn "Skynet" zu nennen und den Namen auf der oberen Abdeckung zu schneiden. Außerdem wurden Ausschnitte für HC-SR04 hinzugefügt.
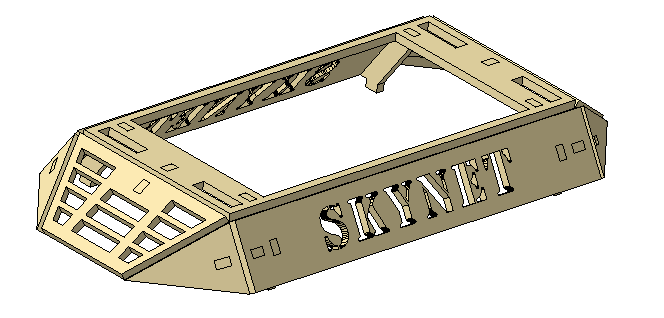
Durch das Hinzufügen von nur zwei Dächern hat die Karosserie das Erscheinungsbild erheblich zum Besseren verändert:

Das Ergebnis hat mich sehr beeindruckt und der Look ist sehr attraktiv. Im
zweiten Teil werde ich über die Montage des Gehäuses und einen Rechen erzählen, auf den ich getreten bin.