Das Startup der Carnegie Mellon University beabsichtigt, die Kreuzung mithilfe von Radio in zukünftigen Autos zu fahren

Das Leben ist kurz und im Verkehr scheint es noch kürzer. Oder wenn Sie an einer Ampel stehen, leuchtet die rote Ampel und niemand fährt die Kreuzung entlang.
In den Vororten von Städten wie Mexiko-Stadt, Sao Paulo, Rom, Moskau, Peking, Kairo und Nairobi kann die morgendliche Fahrt zur Arbeit mehr als zwei Stunden dauern. Fügen Sie hier die Straße von der Arbeit nach Hause hinzu, und es kommt häufig vor, dass Menschen täglich 3-4 Stunden unterwegs sind.
Stellen Sie sich vor, wir könnten ein System entwickeln, das die tägliche Hin- und Rückfahrt beispielsweise um ein Drittel reduziert - von drei auf zwei Stunden. Dies kann Ihnen 22 Stunden im Monat oder 3 Jahre in einer 35-jährigen Karriere sparen.
Nehmen Sie sich ein Herz, unglückliche Reisende zur Arbeit und nach Hause, da ein solches System bereits entwickelt wird und auf mehreren neueren Technologien basiert. Eine davon ist die drahtlose Kommunikation zwischen Autos. Es wird oft als V2V-Technologie (Vehicle-to-Vehicle) bezeichnet, obwohl auch Verkehrssignale und andere Infrastrukturen in diese Verbindung einbezogen werden können. Eine weitere aufkommende Technologie sind Robomobile, die naturgemäß die Zeit bis zur Arbeit verkürzen (und diese Zeit produktiver gestalten) sollten. Und es gibt auch das
Internet der Dinge (
Internet of Things, IoT), das verspricht, nicht nur 7 Milliarden Menschen, sondern auch 30 Milliarden Sensoren und Geräte zusammenzubringen.
Alle diese Technologien können mithilfe eines Algorithmus, den meine Kollegen und ich an der Carnegie Mellon University in Pittsburgh entwickelt haben, zusammenarbeiten. Der Algorithmus ermöglicht es Autos, mithilfe ihrer integrierten Nachrichtensysteme zusammenzuarbeiten, sodass sich Autos ohne Verwendung von Ampeln reibungslos und sicher bewegen können. Für dieses Projekt haben wir die Firma Virtual Traffic Lights (VTL) registriert, den Algorithmus in den Simulationen sorgfältig überprüft und seit Mai 2017 arbeitet dieses Projekt in der Nähe des Universitätscampus. Im Juli haben wir erstmals der öffentlichen VTL-Technologie in Saudi-Arabien demonstriert, an der über 100 Wissenschaftler, Regierungsbeamte und Vertreter privater Unternehmen teilnahmen.
Die Testergebnisse bestätigten, was wir bereits vermutet hatten: Es war Zeit, Ampeln abzulehnen. Wir haben nichts zu verlieren, als unzählige Stunden in einem Auto im Verkehr zu sitzen.
Das Funktionsprinzip der Ampel hat sich seit der Erfindung dieses Geräts im Jahr 1912 und seiner Einführung in Salt Lake City und zwei Jahre später in Cleveland nicht wesentlich geändert [
es sollte klargestellt werden, dass es sich um die erste elektrische Ampel handelt. Das erste Gerät mit Handantrieb wurde im 19. Jahrhundert in London erfunden. perev. ]. Es funktioniert mit einem Timer. Manchmal stehen Sie an der Kreuzung auf Rot und sehen keine anderen Autos in der Nähe. Der Timer kann so eingestellt werden, dass er den Bewegungsmustern zu verschiedenen Tageszeiten entspricht, aber das ist praktisch alles, was getan werden kann - und es ist nicht so viel [
hier sind die Autoren schlau - es gibt seit langem automatische Verkehrssteuerungssysteme mit Kameras, die den Verkehr erfassen, und Fernverkehrskontrollsysteme vom Zentrum aus, wo Personen Verkehrsstaus überwachen / ca. perev. ]. Infolgedessen verbringen viele Menschen jeden Tag viel Zeit.
Stellen Sie sich vor, stattdessen fahren mehrere Autos bis zu einer Kreuzung und tauschen dank der V2V-Technologie Daten aus. Sie stimmen gemeinsam ab und wählen ein Führungsauto für einen bestimmten Zeitraum, in dem es entscheidet, in welche Richtung es zum Hauptauto wird - das Äquivalent von grünem Licht - und in welche Richtung „rot leuchtet“.
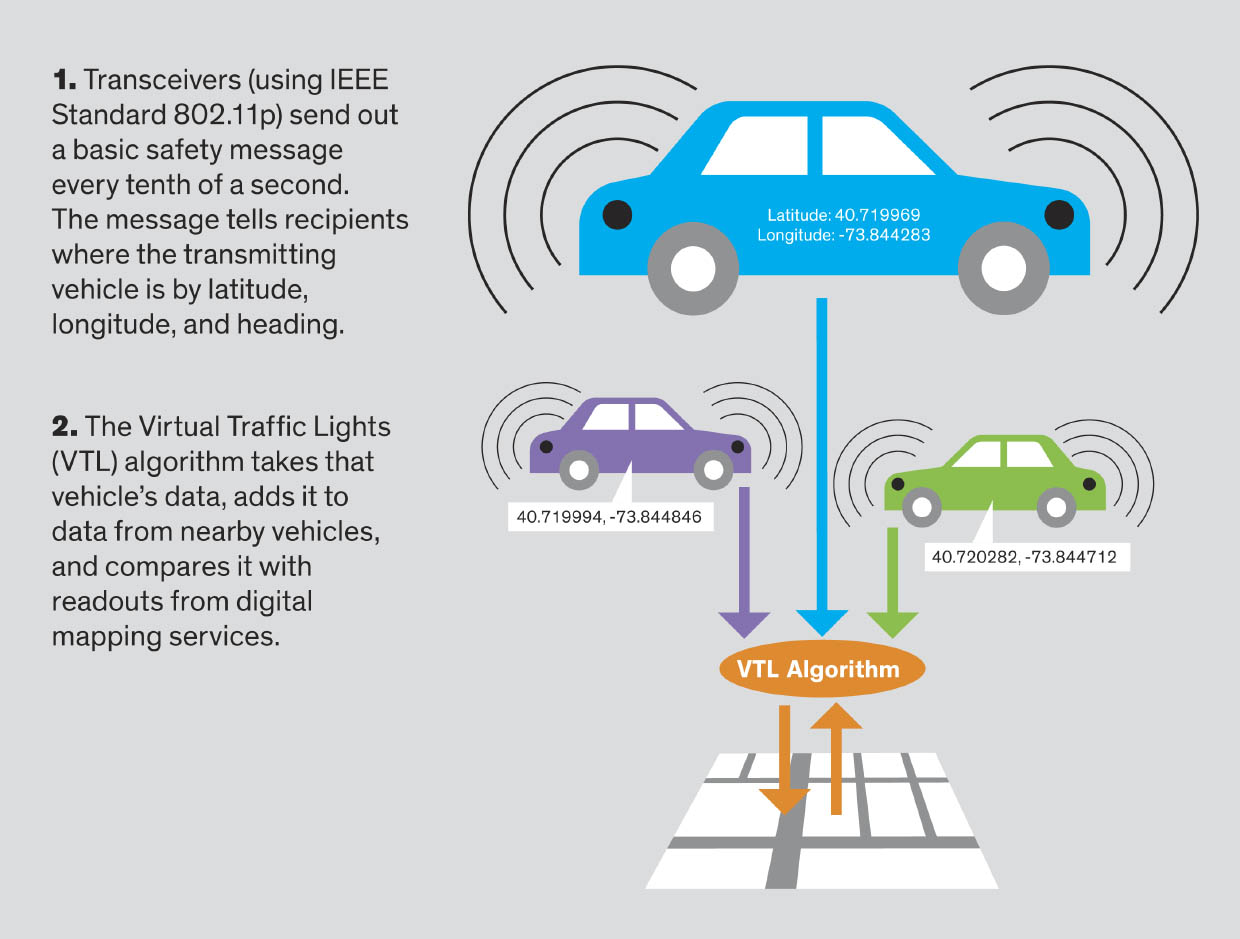 IEEE 802.11p-Transceiver senden 10 Mal pro Sekunde Nachrichten. Die Meldung gibt die Koordinaten der Maschine und die Bewegungsrichtung an.
IEEE 802.11p-Transceiver senden 10 Mal pro Sekunde Nachrichten. Die Meldung gibt die Koordinaten der Maschine und die Bewegungsrichtung an.
Der Algorithmus empfängt Daten, fügt sie den Daten anderer Maschinen hinzu und vergleicht sie mit digitalen Karten.Und wer hat die Hauptstraße? Alles geschieht sehr einfach und mit Respekt. Der Anführer weist seiner Bewegungsrichtung einen Rotlichtstatus zu und gibt allen senkrecht fahrenden Autos grünes Licht. Nach beispielsweise 30 Sekunden wird eine andere Maschine in einem senkrechten Fluss zum Anführer und macht dasselbe. Führung wird hier und da ständig übertragen, um Verantwortung und Last ehrlich zu teilen - schließlich ist die Position eines Führers mit dem Opfer persönlicher Interessen für das Gemeinwohl verbunden.
Bei diesem Ansatz werden keine Ampeln benötigt. Die Verkehrssteuerungsarbeit löst sich nahtlos in der drahtlosen Infrastruktur auf. Sie sitzen nicht mehr im Auto und stehen an der roten Ampel, wenn niemand eine Querstraße entlang fährt.
Unser VTL-Algorithmus wählt Führer aus, indem er Parameter wie die Entfernung zum vorderen Auto von jedem Eingang zur Kreuzung, die Geschwindigkeit der Autos, die Anzahl der Autos auf jeder Straße usw. abfragt. Wenn andere Dinge gleich sind, wählt der Algorithmus das Auto aus, das am weitesten von der Kreuzung entfernt ist, damit es Zeit zum Bremsen hat. Diese Regel stellt sicher, dass das dem Kreisverkehr am nächsten gelegene Fahrzeug die Vorfahrt erhält - also ein virtuelles grünes Licht.
Es ist wichtig zu beachten, dass die Technologie keine Kameras, Radargeräte und Lidars benötigt. Es empfängt alle Informationen von drahtlosen Systemen, die über dedizierte Kurzstreckenkommunikation (
DSRC ) betrieben werden. Hierbei handelt es sich um Funkkreise und einen ihnen zugewiesenen Kommunikationskanal, der von 1999 bis 2008 in den USA, Europa und Japan entwickelt wurde und es nahe gelegenen Autos ermöglicht, miteinander zu kommunizieren. DSRC-Entwickler stellten sich verschiedene Optionen für die Verwendung des Standards vor, darunter das Sammeln von Geldern für die Nutzung mautpflichtiger Straßen und die kooperative adaptive Geschwindigkeitsregelung sowie die Funktion, mit der wir Kollisionen an Kreuzungen vermeiden.
Ab Werk wird das DSRC-System auf eine kleine Anzahl von Maschinen installiert (und möglicherweise wird es durch die neue 5G-Technologie
ersetzt ). Solche Transceiver
können jedoch gekauft werden und verfügen über alle Funktionen, die wir benötigen. Sie verwenden den
IEEE-Standard 802.11p und müssen zehnmal pro Sekunde Nachrichten senden. Die Nachricht muss die Koordinaten und die Bewegungsrichtung des Fahrzeugs angeben. Unser Algorithmus, der am Computer eines Autos arbeitet, empfängt Daten über das Auto, fügt die Daten hinzu, die er von benachbarten erhält, und überlagert das Ergebnis digitalen Karten wie Google Maps, Apple Maps oder OpenStreetMap.
Auf diese Weise kann jedes Auto die Entfernung zur Kreuzung und zu anderen Autos berechnen, die sich aus anderen Richtungen nähern. Sie kann auch die Geschwindigkeit, Beschleunigung und Flugbahn jeder Maschine berechnen. Und das ist alles, was der Algorithmus benötigt, um zu entscheiden, wer die Kreuzung passiert (grünes Licht) und wer anhalten muss (rot). Danach zeigt das Armaturenbrett jedes Autos die Farbe der Ampel an, die für jeden Fahrer eine eigene ist. Natürlich löst der VTL-Algorithmus nur das Problem der Verkehrssteuerung an Kreuzungen, die Definition der Zeichen "Stopp" und "Nachgeben". Er fährt kein Auto. VTL ist jedoch in der Lage, alles zu tun, was es braucht, und ist viel billiger als die vollständig autonome Fahrzeugtechnologie. Robomobile benötigen viel mehr Rechenleistung, um die Daten ihrer Lidars, Radargeräte, Kameras und anderer Sensoren zu ermitteln. Wenn sie diese kombinieren, erhalten sie ein Bild des umgebenden Raums. VTL konkurriert nicht mit der Technologie von Robomobilen, sondern ergänzt sie.
Unsere Methode kann als Ersatz einer praktischen Regel durch echte Intelligenz vorgestellt werden. Der Algorithmus ermöglicht es den Maschinen, den Verkehr selbst zu steuern, wie dies bei Insektenkolonien und Fischschwärmen der Fall ist. Gleichzeitig ändert eine Fischschwarm ihre Bewegungsrichtung, ohne dass ein Hauptverkehrsleiter ihre einzelnen Mitglieder anweist. Jeder Fisch erhält Bewegungsinformationen von benachbarten Fischen.
Dies ist ein Beispiel für das Verhalten eines verteilten Systems als Alternative zu einem zentralisierten Netzwerk. Mit seiner Hilfe kann eine Fahrzeugflotte in einer Stadt den Verkehr ohne zentrale Kontrolle und menschliches Eingreifen unabhängig regulieren - keine Polizei, Ampeln, Haltestellen oder Wegweiser.
Wir haben das Konzept der intelligenten Kreuzungen nicht erfunden, es gibt es schon seit mehreren Jahrzehnten. Eine der frühesten Ideen war die Installation von Magnetspulen unter der Oberfläche des Asphalts, die die Annäherung von Autos an die Kreuzung bestimmen und die Dauer der grünen und roten Phase anpassen würden. Sie können auch Kameras an Kreuzungen verwenden, um die sich nähernden Autos zu berechnen und die beste Zeit für die Phasen der Ampel zu berechnen. Die Installation und Wartung beider Technologien ist jedoch teuer und wird daher an wenigen Kreuzungen installiert.
Wir haben zunächst den VTL-Algorithmus in virtuellen Modellen zweier Städte eingeführt: Pittsburgh in den USA und Porto in Portugal. Wir haben Verkehrsdaten vom US-Volkszählungsamt und der zuständigen portugiesischen Behörde genommen, Karten von Google Maps hinzugefügt und alles an SUMO (
Simulation der städtischen Mobilität , ein städtischer Verkehrssimulator) weitergeleitet - Open-Source-Software, die vom Deutschen Zentrum für Luft- und Raumfahrt entwickelt wurde.
SUMO simulierte die Hauptverkehrszeit in zwei Szenarien - eine unter Verwendung vorhandener Ampeln, die andere unter Verwendung unseres VTL-Algorithmus. Es wurde festgestellt, dass VTL die durchschnittliche Reisezeit in Porto von 35 Minuten auf 21,3 Minuten und in Pittsburgh von 30,7 Minuten auf 18,3 Minuten reduziert. Die Verkürzung der Reisezeit von Menschen, die aus den Vororten in die Stadt einreisen, verringerte sich um nicht weniger als 30% und bis zu 60%. Wichtig ist, dass auch die Variation der Reisezeit - die Abweichung der Menge vom Mittelwert - abnahm.
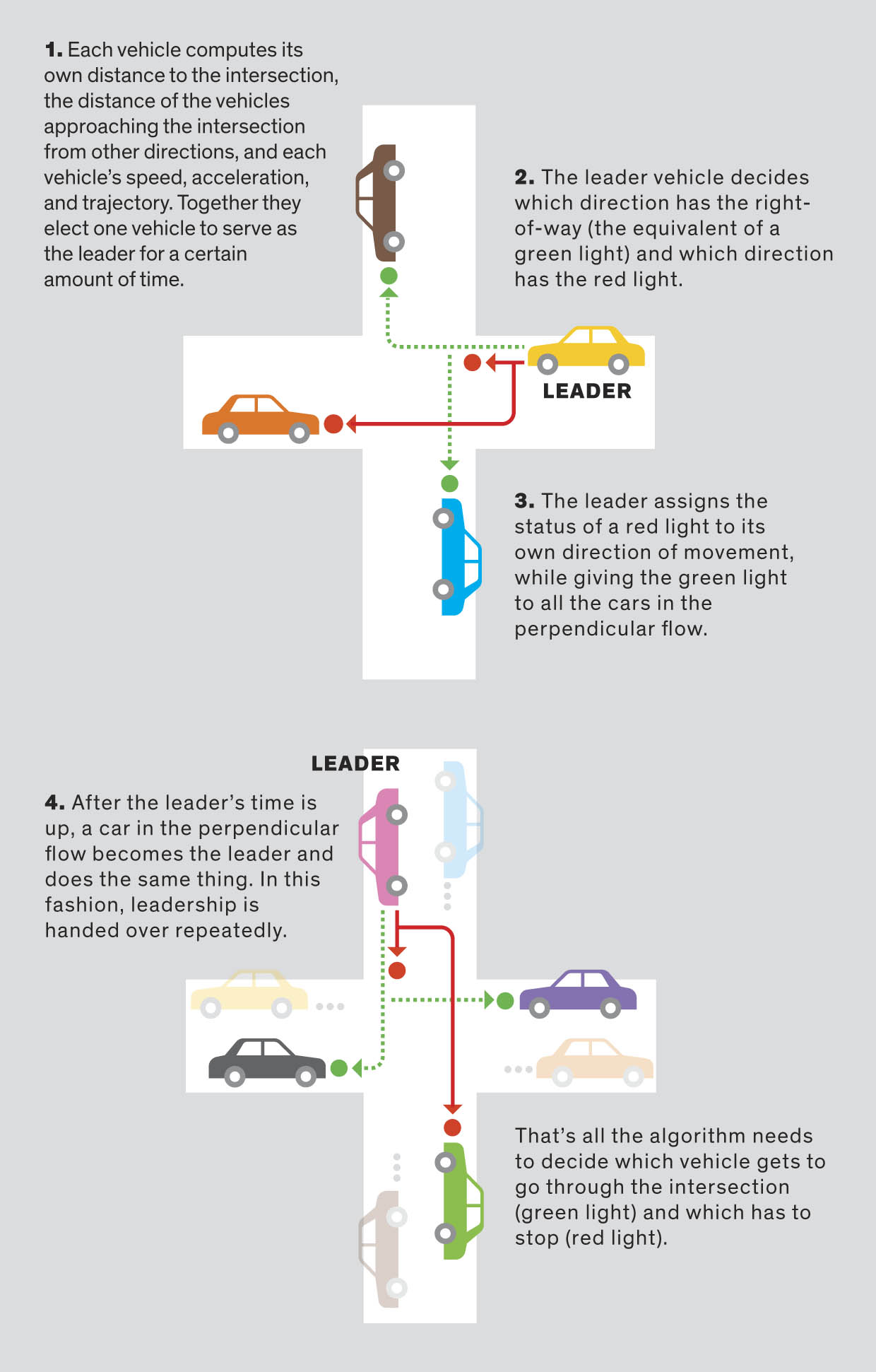 Leader-Auswahlschema
Leader-AuswahlschemaZeit wird aus zwei Gründen gespart. Erstens eliminiert VTL die Wartezeit an der roten Ampel, wenn niemand auf einer Kreuzung fährt. Zweitens steuert VTL den Verkehr an allen Kreuzungen und nicht nur dort, wo aktive Signale vorhanden sind. Daher mussten die Autos beispielsweise nicht dort anhalten, wo sich ein Stoppschild befindet, wenn keine anderen Autos in der Nähe waren.
Unsere Simulationen haben andere Vorteile gezeigt - vielleicht sogar wichtiger als Zeit zu sparen. Die Zahl der Verkehrsunfälle ging um 70% zurück, und die Reduzierungen erfolgten größtenteils an Kreuzungen und an Stoppschildern. Durch die Minimierung des Zeitaufwands vor einer Ampel, des Beschleunigens und Bremsens reduziert VTL die CO2-Emissionen von Autos erheblich.
Was ist erforderlich, um VTL vom Labor in die reale Welt zu übertragen? Zuerst müssen Sie DSRC in gefertigten Autos einbauen. Im Jahr 2014 schlug die National Highway Traffic Safety Administration der Vereinigten Staaten die Verwendung dieser Technologie vor, aber die Trump-Administration hat noch keine geeigneten Regeln entwickelt, und es ist noch nicht klar, wie die endgültige Entscheidung aussehen wird. Daher werden Hersteller in den USA zögern, DSRC-Transceiver in Maschinen zu integrieren, da sie ihre Kosten erhöhen und nur dann nützlich sind, wenn sie sich auf anderen Maschinen befinden - ein Standard-Henne-Ei-Problem.
Bis eine ausreichende Anzahl von Maschinen mit solchen Geräten ausgestattet ist, bleibt der Produktionsumfang niedrig und die Kosten bleiben hoch. In den USA begann nur General Motors, DSRC-Radios in Autos zu integrieren, und alle sind teure Cadillac-Modelle. In Europa und Japan ist das Bild jedoch positiver. Viele europäische Autohersteller haben beschlossen, diese Transceiver in Autos zu integrieren, und dieses Jahr begann sie in Japan, wo die Regierung den Einsatz von Technologie befürwortet, und der Fertigungsriese Toyota hat wiederholt seine Bereitschaft für diesen Schritt bestätigt.
Aber selbst wenn mit DSRC nichts passiert, kann unser Algorithmus auf der Basis anderer drahtloser Technologien wie 5G oder Wi-Fi erstellt werden.
Das Konzept der unvollständigen Penetration des Transceivers wirft das Problem eines der größten Hindernisse für die Implementierung von VTL auf. Kann es funktionieren, wenn nur ein kleiner Prozentsatz der Autos mit Sendern ausgestattet ist? Ja, wenn Beamte beschließen, vorhandene Ampeln mit dieser Technologie auszustatten.
Beamte möchten dies möglicherweise tun, wenn auch nur dann, um die vorhandene Infrastruktur im Wert von Hunderten von Milliarden Dollar nicht aufzugeben. Wir bieten eine kurzfristige Lösung für dieses Problem: Sie können vorhandene Ampeln so aktualisieren, dass sie das Vorhandensein von mit DSRC ausgestatteten Fahrzeugen auf der Straße erkennen und die grüne und rote Phase entsprechend einstellen. Das Schöne an diesem Schema ist, dass alle Autos die Straßen und die Kreuzung benutzen können, unabhängig vom Vorhandensein eines Radios. Dieser Ansatz reduziert die Zeit möglicherweise nicht so stark wie die ideale Lösung, ist jedoch nach unseren Simulationen und Feldversuchen in Pittsburgh immer noch 23% besser als die aktuellen Verkehrsmanagementsysteme.
Ein weiteres Problem ist der Umgang mit Fußgängern und Radfahrern. Selbst wenn alle Autos und Lastwagen gewaltsam mit Transceivern ausgestattet sind, kann man nicht erwarten, dass Radfahrer sie aufstellen und von Fußgängern getragen werden. Aus diesem Grund wird es für Menschen schwierig sein, stark befahrene Kreuzungen sicher zu überqueren.
Unsere kurzfristige Lösung für die Zeit des gemeinsamen Bestehens von Ampel und VTL besteht darin, Fußgängern die Möglichkeit zu geben, ihre eigene Hauptstraße zu gestalten. In unserem Pilotprogramm in Pittsburgh haben wir auf allen vier Seiten der Kreuzung einen Knopf platziert, der ein rotes Licht beleuchtet - real für Fußgänger und virtuell für Autos. Dieses System funktionierte jedes Mal, wenn es aktiviert wurde.
Langfristig können die Probleme von Radfahrern und Fußgängern mit Hilfe des Internet der Dinge gelöst werden. Mit der IoT-Erweiterung wird die Zeit kommen, in der jeder immer ein Gerät bei sich hat, das DSRC unterstützt.
In der Zwischenzeit haben wir gezeigt, dass Autos, die für das Wegerecht stimmen, unter idealen Bedingungen ohne physische Signale einen Teil des Fahrrads Fußgängern zuweisen können. Während der Schicht leuchtet in allen Autos an allen Eingängen der Kreuzung ein virtuelles rotes Licht, das lange genug anhält, damit Fußgänger die Straße sicher überqueren können. Diese vorläufige Lösung ist für einen dichten Fluss nicht optimal. Daher arbeiten wir an einer Methode, bei der kostengünstige Kameras am Armaturenbrett von Autos verwendet werden, um Fußgänger zu erkennen und ihnen Platz zu machen.
Die vielversprechende Technologie der virtuellen Ampeln nähert sich der Ära der Robomobile. Heute stellen wir uns vor, dass solche Autos alles tun, was menschliche Fahrer tun: an Ampeln anhalten, an den Hinweisschildern nachgeben und so weiter. Aber warum halbieren? Es wäre viel besser, wenn solche Maschinen die Bewegung völlig unabhängig ohne die üblichen Zeichen und Signale steuern würden. Der Schlüssel dazu ist V2V und die Infrastruktur dieser Kommunikation.
Dies ist wichtig, da heutige Robomobile häufig nicht durch stark befahrene Kreuzungen navigieren und fahren können. Dies ist eines der schwierigsten technischen Probleme und stört auch den Branchenführer von Waymo.
In unseren Simulationen und Feldversuchen haben wir festgestellt, dass mit VTL ausgestattete Robomobile Kreuzungen ohne Ampeln und Schilder steuern können. Das Fehlen der Notwendigkeit, diese Objekte zu erkennen, vereinfacht die Computer-Vision-Algorithmen und die Computer, auf denen sie ausgeführt werden, erheblich, auf die sich die heutigen experimentellen Robomobile stützen. Insgesamt stellen diese Elemente zusammen mit Sensoren (insbesondere Lidars) den teuersten Teil von Robomobilen dar.
Da die Softwarearchitektur von VTL modular aufgebaut ist, kann sie problemlos in die Robomobile-Software integriert werden. Darüber hinaus ist VTL in der Lage, die meisten, wenn nicht sogar alle schwierigsten Probleme im Zusammenhang mit Computer Vision zu lösen - beispielsweise wenn die Sonne in die Kamera scheint oder Regen, Schnee, Sandsturm oder Kurven der Straße die Sicht blockieren. VTL konkurriert natürlich nicht mit der Robotertechnologie. es ergänzt sie. Und dies allein kann dazu beitragen, den Start von Robomobilen auf der Straße zu beschleunigen.
Wir hoffen jedoch, dass unser System lange vor diesem Zeitpunkt in Maschinen funktioniert, die von Menschen gesteuert werden. Bereits im Juli dieses Jahres konnten wir in der Stadt Riad in Saudi-Arabien bei einer Hitze von 43 ° C eine öffentliche Demonstration der Technologie mit auf Testmaschinen installierten Geräten durchführen. Regierung, Wissenschaft und Unternehmen - einschließlich Uber - stiegen in einen Mercedes-Benz Bus und fuhren um den Wissenschafts- und Technologiecampus von König Abdulaziz herum, überquerten drei Kreuzungen, von denen zwei keine Ampel hatten. Der Bus sowie der GMC-Lkw, der Hyundai SUV und der Citroën-Pkw überquerten diese Kreuzungen auf jede erdenkliche Weise, und das VTL-System funktionierte jedes Mal erfolgreich. Wenn ein Fahrer die rote Ampel nicht speziell befolgte und versuchte, die Kreuzung zu überqueren, zeigte unser Sicherheitssystem allen anderen sich nähernden Autos ein rotes Blinken an, was den Vorfall verhinderte.
Ich hoffe, dass dieser Moment ein Wendepunkt in unserem Transportmanagementsystem war. Ampeln haben sich durchgesetzt. Und tatsächlich existieren sie seit mehr als hundert Jahren. Es ist Zeit weiterzumachen.